一种机床智能换刀移动复合机器人的制作方法
本技术属于数控机床,具体涉及一种机床智能换刀移动复合机器人。
背景技术:
1、金属加工指人类对由金属元素或以金属元素为主构成的具有金属特性的材料进行加工的生产活动,是一种把金属物料加工成为物品、零件、组件的工艺技术,人类社会的进步与金属材料的加工与运用关系十分密切,被广泛应用在科学、工业、艺术品、手工艺等不同的领域。
2、现有换刀机器人的刀库体积大较大,不利于空间的充分利用,同时换刀机构结构复杂,成本较高,对金属进行加工时操作不够灵活,无法很好的从刀库处快速换刀,影响加工的效率。
技术实现思路
1、(1)要解决的技术问题
2、针对现有技术的不足,本实用新型的目的在于提供一种机床智能换刀移动复合机器人,该机器人旨在解决现有换刀机器人的刀库体积大较大,同时换刀机构结构复杂,对金属进行加工时操作不够灵活,无法很好的从刀库处快速换刀,影响加工效率的问题。
3、(2)技术方案
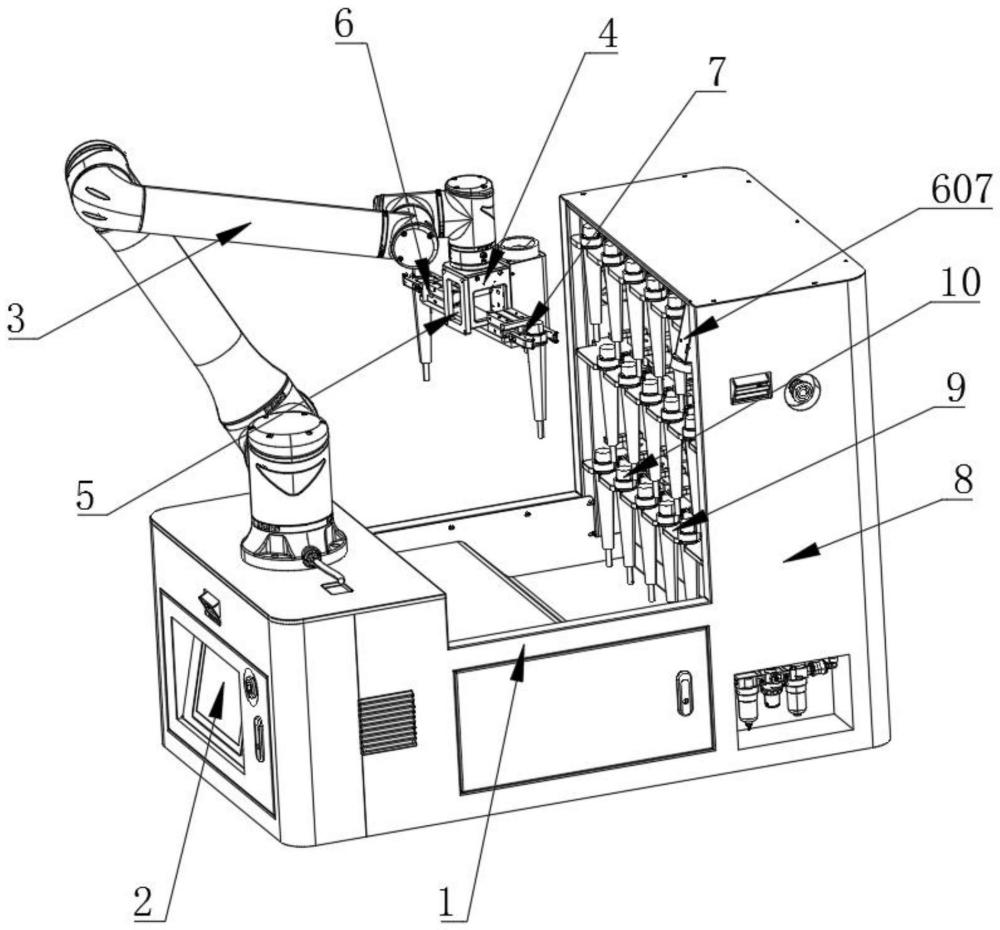
4、为了解决上述技术问题,本实用新型提供了这样一种机床智能换刀移动复合机器人,该机器人包括机座和安装在机座左侧内部的控制器,机座的上表面左侧安装有五轴机械手,五轴机械手的输出端安装有安装架,安装架的底端固定连接有安装板,安装板的左右两侧分别设置有第一夹爪和第二夹爪,机座的上表面右侧安装有刀库外壳,刀库外壳的内部固定连接有多个刀架,刀架上安装有多个加工刀具,上下加工刀具交错设置,第一夹爪和第二夹爪通过五轴机械手将加工刀具取出或放置在刀架上。
5、优选地,五轴机械手包括固定连接在机座上表面左侧的固定座,固定座的上表面转动安装有第一机械臂,第一机械臂的一端转动安装有第二机械臂,第二机械臂的一端转动安装有第三机械臂,第三机械臂的一端转动安装有第四机械臂,第四机械臂的一端转动安装有第五机械臂,安装架安装在第五机械臂的输出端。
6、进一步的,第一夹爪和第二夹爪的结构相同,第一夹爪和第二夹爪均包括夹爪气缸和安装在夹爪气缸输出端的两个活动块,活动块的一侧固定连接有刀具夹爪,安装板的左右两侧均设置有第一传感器,第一传感器位于两个刀具夹爪之间。
7、更进一步的,两个刀具夹爪相靠近的一侧均开设有夹槽,夹槽的内壁底端固定连接有一圈挡环。
8、更进一步的,刀架的数量为三个,刀架的正面开设有与加工刀具相对应的环形卡槽,环形卡槽的上表面边缘开设有定位槽。
9、更进一步的,刀架的后侧安装有电动推杆,电动推杆的神缩端安装有横杆,横杆的上表面固定连接有与加工刀具相对应的压头,刀架的上表面安装有与加工刀具相对应的第二传感器,上侧刀架的右侧安装有扫码相机。
10、更进一步的,横杆下表面的左右两侧均固定连接有导向杆,刀架的左右两侧均固定连接有导向座,导向杆的底端贯穿导向座,导向杆与导向座滑动连接。
11、(3)有益效果
12、与现有技术相比,本实用新型的有益效果在于:
13、1、本实用新型通过采用三层的错位料仓结构,使上侧的刀具位于下侧两个刀具之间,从而可以降低料仓高度和兼容更长的刀具,并且刀具放置在刀架后,通过压头将刀具固定,从而避免在行走时刀具出现跳动,且结构简单,组装非常的方便。
14、2、本实用新型采用双夹爪机构,换刀时机械手将第一夹爪移动到刀库处将新的加工刀具固定,接着夹爪移动到固定位置,第二夹爪将主轴的旧刀具取出,然后由主轴在机械手上的刀具夹爪内取出新的加工刀具,从而实现快速换刀,减少换刀时间。
15、3、本实用新型通过多个机械臂配合能够使五轴机械手的输出端在x、y和z轴上移动,实现自动的上下调节,从而使得第一夹爪和第二夹爪能够灵活操作,更好的从刀库中取出加工刀具,实现快速换刀的目的,提高加工的效率。
技术特征:
1.一种机床智能换刀移动复合机器人,该机器人包括机座(1)和安装在机座(1)左侧内部的控制器(2),其特征在于:所述机座(1)的上表面左侧安装有五轴机械手(3),所述五轴机械手(3)的输出端安装有安装架(4),所述安装架(4)的底端固定连接有安装板(5),所述安装板(5)的左右两侧分别设置有第一夹爪(6)和第二夹爪(7);
2.根据权利要求1所述的一种机床智能换刀移动复合机器人,其特征在于,所述五轴机械手(3)包括固定连接在机座(1)上表面左侧的固定座(301),所述固定座(301)的上表面转动安装有第一机械臂(302),所述第一机械臂(302)的一端转动安装有第二机械臂(303),所述第二机械臂(303)的一端转动安装有第三机械臂(304),所述第三机械臂(304)的一端转动安装有第四机械臂(305),所述第四机械臂(305)的一端转动安装有第五机械臂(306),所述安装架(4)安装在第五机械臂(306)的输出端。
3.根据权利要求1所述的一种机床智能换刀移动复合机器人,其特征在于,所述第一夹爪(6)和第二夹爪(7)的结构相同,所述第一夹爪(6)和第二夹爪(7)均包括夹爪气缸(601)和安装在夹爪气缸(601)输出端的两个活动块(602),所述活动块(602)的一侧固定连接有刀具夹爪(603),所述安装板(5)的左右两侧均设置有第一传感器(604),所述第一传感器(604)位于两个刀具夹爪(603)之间。
4.根据权利要求3所述的一种机床智能换刀移动复合机器人,其特征在于,两个所述刀具夹爪(603)相靠近的一侧均开设有夹槽(605),所述夹槽(605)的内壁底端固定连接有一圈挡环(606)。
5.根据权利要求1所述的一种机床智能换刀移动复合机器人,其特征在于,所述刀架(9)的数量为三个,所述刀架(9)的正面开设有与加工刀具(10)相对应的环形卡槽(901),所述环形卡槽(901)的上表面边缘开设有定位槽(902)。
6.根据权利要求5所述的一种机床智能换刀移动复合机器人,其特征在于,所述刀架(9)的后侧安装有电动推杆(903),所述电动推杆(903)的神缩端安装有横杆(904),所述横杆(904)的上表面固定连接有与加工刀具(10)相对应的压头(905),所述刀架(9)的上表面安装有与加工刀具(10)相对应的第二传感器(906),上侧所述刀架(9)的右侧安装有扫码相机(907)。
7.根据权利要求6所述的一种机床智能换刀移动复合机器人,其特征在于,所述横杆(904)下表面的左右两侧均固定连接有导向杆(908),所述刀架(9)的左右两侧均固定连接有导向座(909),所述导向杆(908)的底端贯穿导向座(909),所述导向杆(908)与导向座(909)滑动连接。
技术总结
本技术公开了一种机床智能换刀移动复合机器人,该机器人旨在解决现有换刀机器人的刀库体积大较大,同时换刀机构结构复杂,对金属进行加工时操作不够灵活,无法很好的从刀库处快速换刀,影响加工效率的问题。该机器人包括机座和安装在机座左侧内部的控制器,机座的上表面左侧安装有五轴机械手,五轴机械手的输出端安装有安装架,安装架的底端固定连接有安装板。本技术通过采用双夹爪机构和三层的错位料仓结构,可以降低料仓高度和兼容更长的刀具,实现快速换刀,减少换刀时间,并且通过多个机械臂配合能够使五轴机械手的输出端在X、Y和Z轴上移动,使得第一夹爪和第二夹爪能够灵活操作,提高加工的效率。
技术研发人员:贺喜,王亮,梁翰计,崔冲,陈智捷
受保护的技术使用者:广东爱吉尔机器人科技有限公司
技术研发日:20240229
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!