伺服电机驱动的机械手移钳机构的制作方法
本技术涉及机械工程,特别是一种伺服电机驱动的机械手移钳机构。
背景技术:
1、在现代工业生产中,多工位自动冷镦机作为一种高效的金属成型设备,广泛应用于汽车、航空、电子等多个领域。该设备依据金属塑变理论,在常温条件下对金属坯料施加压力,使其在模具内发生塑性变形,从而实现精确成型。冷镦工艺以其高效、节能和环保的特点,成为金属加工领域的重要技术。
2、在多工位自动冷镦机的操作过程中,金属坯料需要在不同工位间进行精确转移。这一过程通常依赖于独立的机械夹钳系统,这些夹钳通过活动机构实现坯料的抓取和释放。然而,传统的机械夹钳开闭动作依赖于复杂的机械传动系统,如伞齿、轴、连杆的传递模式等组合,传动零件很多,这种传动方式对冷镦夹钳机构整体的安装位置和强度要求较高,且当出现故障时,复杂的传动结构也使检修难度增大。同时,这种结构还使得冷镦夹钳机构制造和安装过程较为复杂,整体成本较高。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种使夹钳运动更加平稳柔和,及夹钳精确的往复移动,且整体结构简单可靠,大大降低制造和维护成本的伺服电机驱动的机械手移钳机构。
2、为了达到上述目的,本实用新型设计的伺服电机驱动的机械手移钳机构,包括钳板和安装在钳板上的夹钳机构,其特征在于,还包括框架、安装在所述框架上的伺服电机、双凸轮机构和摇臂机构;所述双凸轮机构包括固定连接所述伺服电机的输出端的轮毂和固定安装在轮毂上的两个凸轮;所述摇臂机构与两个凸轮传动配合,所述钳板通过连杆与摇臂机构背离双凸轮机构的自由端连接;所述伺服电机具有plc控制器,所述plc控制器与冷镦机主传动机构动作联锁,并配置为在冷镦机完成一次冷镦后驱动连杆带动夹钳机构平行移动送料。
3、为了满足对夹钳机构运动的精确控制,所述双凸轮机构为共轭凸轮,所述摇臂机构采用中部铰接于框架的y形摇臂,该y形摇臂的两条杆臂的自由端分别通过滚轮与共轭凸轮的两个凸轮面相抵接。
4、为了提高设备的适用性和灵活性,所述连杆为长度可螺纹调节的伸缩杆。
5、为了连接部件之间的对齐和配合,所述连杆的两端与钳板及摇臂机构之间的连接均采用销轴转动连接。
6、为了提高加工的精度和一致性,所述摇臂机构的自由端水平摆动间距与钳板上相邻夹钳机构的间距一致。
7、本实用新型所设计的伺服电机驱动的机械手移钳机构,通过采用伺服电机控制实现高精度定位控制,双凸轮减速传动使夹钳运动更加平稳柔和,及夹钳精确的往复移动,且整体结构简单可靠,大大降低制造和维护成本,同时解决了冷镦多工位间的自动化快速移钳难题,满足了自动加工过程对夹钳移动的精确控制需求。
技术特征:
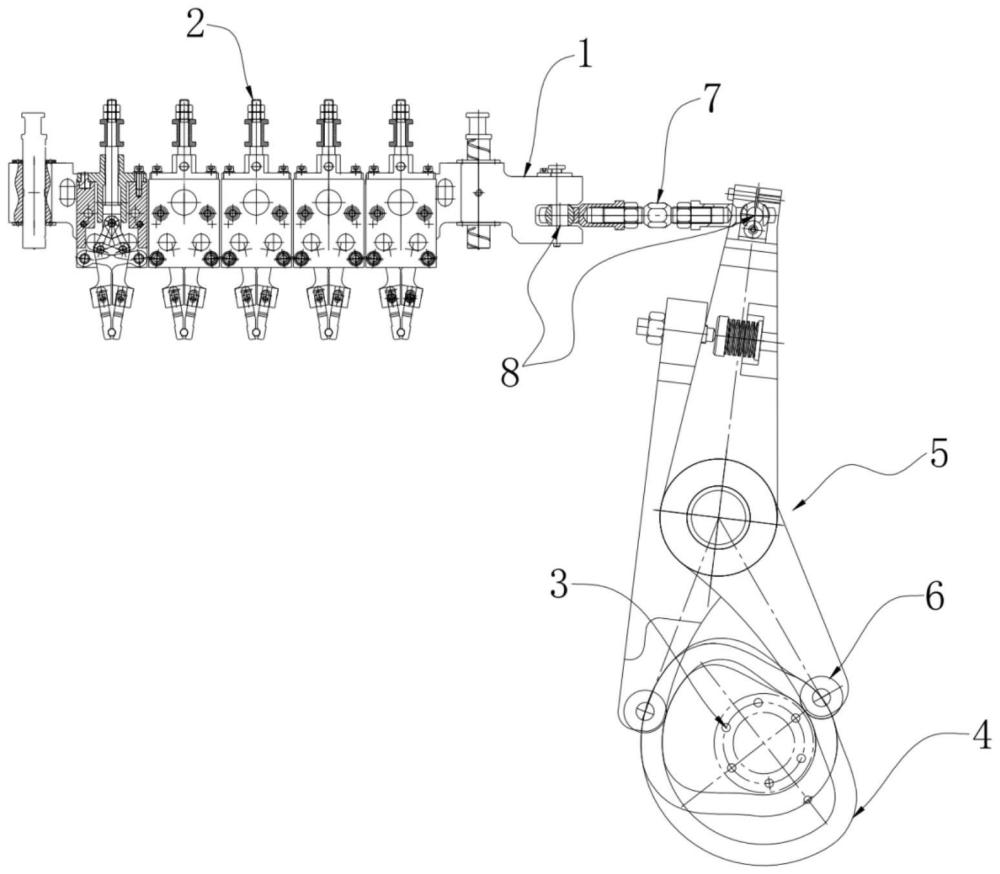
1.一种伺服电机驱动的机械手移钳机构,包括钳板(1)和安装在钳板(1)上的夹钳机构(2),其特征在于,还包括框架、安装在所述框架上的伺服电机(3)、双凸轮机构(4)和摇臂机构(5);所述双凸轮机构(4)包括固定连接所述伺服电机(3)的输出端的轮毂和固定安装在轮毂上的两个凸轮;所述摇臂机构(5)与两个凸轮传动配合,所述钳板(1)通过连杆(7)与摇臂机构(5)背离双凸轮机构(4)的自由端连接;所述伺服电机(3)具有plc控制器,所述plc控制器与冷镦机主传动机构动作联锁,并配置为在冷镦机完成一次冷镦后驱动连杆(7)带动夹钳机构(2)平行移动送料。
2.根据权利要求1所述的伺服电机驱动的机械手移钳机构,其特征在于,所述双凸轮机构(4)为共轭凸轮,所述摇臂机构(5)采用中部铰接于框架的y形摇臂,该y形摇臂的两条杆臂(41)的自由端分别通过滚轮(6)与共轭凸轮的两个凸轮面相抵接。
3.根据权利要求1所述的伺服电机驱动的机械手移钳机构,其特征在于,所述连杆(7)为长度可螺纹调节的伸缩杆。
4.根据权利要求1或3所述的伺服电机驱动的机械手移钳机构,其特征在于,所述连杆(7)的两端与钳板(1)及摇臂机构(5)之间的连接均采用销轴(8)转动连接。
5.根据权利要求1所述的伺服电机驱动的机械手移钳机构,其特征在于,所述摇臂机构(5)的自由端水平摆动间距与钳板(1)上相邻夹钳机构(2)的间距一致。
技术总结
本技术涉及一种伺服电机驱动的机械手移钳机构,包括钳板和安装在钳板上的夹钳机构,还包括框架、安装在框架上的伺服电机、双凸轮机构和摇臂机构;摇臂机构与两个凸轮传动配合;伺服电机具有PLC控制器,PLC控制器与冷镦机主传动机构动作联锁,并配置为在冷镦机完成一次冷镦后驱动连杆带动夹钳机构平行移动送料。本技术所设计的伺服电机驱动的机械手移钳机构,通过采用伺服电机控制实现高精度定位控制,双凸轮减速传动使夹钳运动更加平稳柔和,及夹钳精确的往复移动,且整体结构简单可靠,大大降低制造和维护成本,同时解决了冷镦多工位间的自动化快速移钳难题,满足了自动加工过程对夹钳移动的精确控制需求。
技术研发人员:周佳标,陈舰琳,吴旭辉
受保护的技术使用者:思进智能成形装备股份有限公司
技术研发日:20240304
技术公布日:2024/9/23
- 还没有人留言评论。精彩留言会获得点赞!