一种连续冲压成型模具步距定位机构的制作方法
本技术涉及成型模具,更具体地说,本技术涉及一种连续冲压成型模具步距定位机构。
背景技术:
1、冲压,是在室温下,利用安装在压力机上的模具对材料施加压力,使其产生分离或塑性变形,从而获得所需零件的一种压力加工方法,在连续冲压成型模具使用中需要步距定位机构,现有的连续冲压成型模具步距定位机构在定位的准确性方面较差,导致对材料加工的损坏,造成材料使用率下降。
2、专利申请公布号:cn214639412u一种连续冲压成型模具步距定位机构,通过设置工作台用于对转动轮进行安装和限位,提高转动轮在转动时的稳定性,通过设置电机用于驱动传动带进行转动,进而传动带带动转动轮进行转动,转动轮带动传送带转动,从而对材料进行输送,通过设置计时装置用于对电动夹杆进行控制,通过设置电动夹杆和固定装置相互配合用于材料进行限位和固定,通过设置成型模具本体用于对材料进行冲压成型,同时解决了现有连续冲压成型模具步距定位机构在定位的准确性方面较差,导致对材料加工的损坏,造成材料使用率下降的问题。
3、但是该结构在实际使用时,通过设置电动夹杆和固定装置相互配合用于材料进行限位和固定,但只能对一种尺寸的工件进行稳定限位和固定,实用性较低,而且在连续冲压的过程中,板材和需要冲压的位置需要人为控制调整端正后再进行传送,影响了产品的精度和质量。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供一种连续冲压成型模具步距定位机构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种连续冲压成型模具步距定位机构,包括工作台,所述工作台的一侧设置有冲压架,所述冲压架的内部设置有冲压机构,所述工作台的一侧设置有夹持机构;
4、所述夹持机构包括设置在工作台一侧的连接杆,所述连接杆的一侧设置有多个电动伸缩杆,多个所述电动伸缩杆的一侧均设置有夹持板,所述夹持板的一侧设置有硅胶片,所述硅胶片的表面开设有固定槽,所述固定槽的内部设置有固定块,所述固定块的顶部设置有把手,所述把手的底部设置有插块,所述夹持板的表面开设有插槽,所述插块与插槽活动卡接。
5、通过采用上述技术方案:为了方便对不同尺寸的工件进行夹持,从而提高实用性,而且可以对硅胶片进行拆卸替换。
6、作为上述技术方案的进一步描述:所述冲压机构包括设置在冲压架内部的冲压机,所述冲压机的底部设置有冲压台,所述冲压台的表面开设有活动槽,所述活动槽的内部设置有活动板,所述活动板的底部设置有支撑块,所述支撑块的横截面设置为t形,所述支撑块的底部设置有两个弹簧,两个所述弹簧的底部均设置有固定板,所述固定板的顶部设置有距离感应器。
7、通过采用上述技术方案:为了保证冲压过程中的安全性,而且使测量更加精准。
8、作为上述技术方案的进一步描述:所述工作台的一侧设置有电机箱,所述电机箱的内部设置有电机,所述电机的输出端同轴传动连接有转轴,所述转轴上套设有两个第一齿轮,两个所述第一齿轮的表面啮合有传送带,所述传送带的内部啮合有两个第二齿轮,所述第二齿轮的内部设置有转杆,所述转杆与工作台相连接。
9、通过采用上述技术方案:为了使材料在传送带上平稳运行,而且对材料达到步距定位的效果。
10、作为上述技术方案的进一步描述:所述工作台的底部设置有液压缸,所述液压缸的底部设置有万向轮,所述冲压架的底部设置有支撑腿。
11、通过采用上述技术方案:为了方便对装置的高度进行调节,而且方便本装置移动。
12、本实用新型的技术效果和优点:
13、1、通过设置夹持机构,与现有技术相比,利用电动伸缩杆带动夹持板进行移动,夹持板带动硅胶片向靠近材料的一侧移动,直至将材料进行夹持,将材料两侧进行夹持,从而使材料保持在工作台的中间部分,使其位置更加精准,并且当长时间使用硅胶片磨损严重后,通过工作人员握住把手向上拉动,从而带动固定块与固定槽分离,而且插块与插槽分离,从而将硅胶片取下替换,便于操作,而且提高生产效率;
14、2、通过设置冲压机构,与现有技术相比,利用冲压机对材料进行冲压,如若继续冲压,此时,距离感应器感应到板材受压变形后,将信号传递给外部控制器,从而使夹持机构松开板材,接着,启动电机,继续对材料进行运输,带动板材进行水平移动,待板材移动到待加工位置,启动冲压机进行冲压,使材料在活动板表面向下移,带动支撑块向下移动,直至底部弹簧变形,从而对材料达到步距定位的效果,提高了产品的精度和质量。
技术特征:
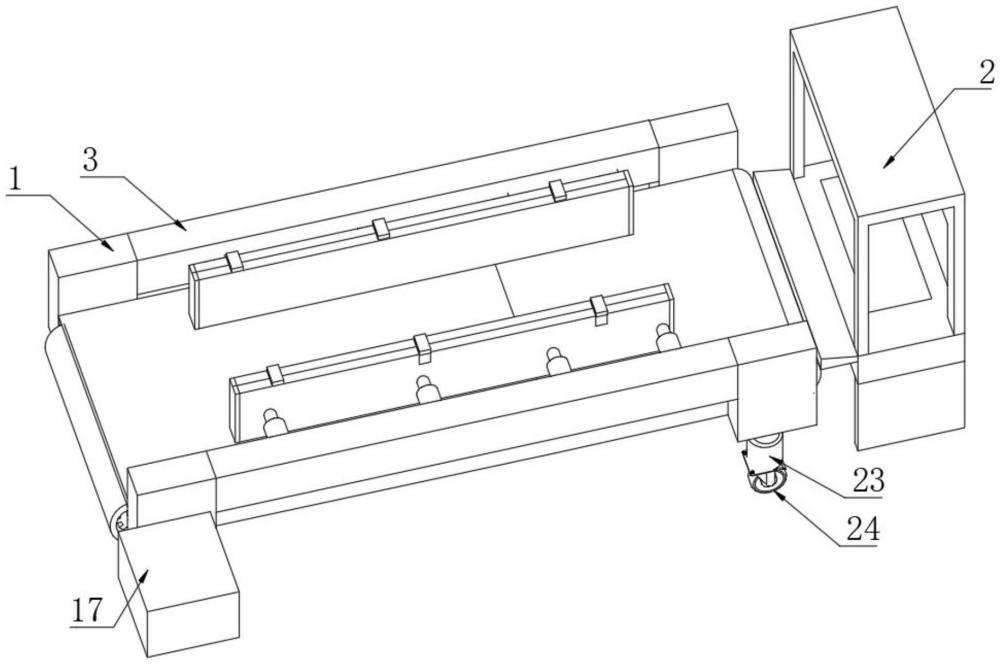
1.一种连续冲压成型模具步距定位机构,包括工作台(1),其特征在于:所述工作台(1)的一侧设置有冲压架(2),所述冲压架(2)的内部设置有冲压机构,所述工作台(1)的一侧设置有夹持机构;
2.根据权利要求1所述的一种连续冲压成型模具步距定位机构,其特征在于:所述冲压机构包括设置在冲压架(2)内部的冲压机(10),所述冲压机(10)的底部设置有冲压台(11),所述冲压台(11)的表面开设有活动槽,所述活动槽的内部设置有活动板(12),所述活动板(12)的底部设置有支撑块(13)。
3.根据权利要求2所述的一种连续冲压成型模具步距定位机构,其特征在于:所述支撑块(13)的横截面设置为t形,所述支撑块(13)的底部设置有两个弹簧(14),两个所述弹簧(14)的底部均设置有固定板(15),所述固定板(15)的顶部设置有距离感应器(16)。
4.根据权利要求1所述的一种连续冲压成型模具步距定位机构,其特征在于:所述工作台(1)的一侧设置有电机箱(17),所述电机箱(17)的内部设置有电机,所述电机的输出端同轴传动连接有转轴(18),所述转轴(18)上套设有两个第一齿轮(19),两个所述第一齿轮(19)的表面啮合有传送带(20)。
5.根据权利要求4所述的一种连续冲压成型模具步距定位机构,其特征在于:所述传送带(20)的内部啮合有两个第二齿轮(21),所述第二齿轮(21)的内部设置有转杆(22),所述转杆(22)与工作台(1)相连接。
6.根据权利要求1所述的一种连续冲压成型模具步距定位机构,其特征在于:所述工作台(1)的底部设置有液压缸(23),所述液压缸(23)的底部设置有万向轮(24)。
7.根据权利要求1所述的一种连续冲压成型模具步距定位机构,其特征在于:所述冲压架(2)的底部设置有支撑腿(25)。
技术总结
本技术公开了一种连续冲压成型模具步距定位机构,具体涉及成型模具技术领域,包括工作台,其中工作台的一侧设置有冲压架,其中冲压架的内部设置有冲压机构,并且工作台的一侧设置有夹持机构,其中夹持机构包括设置在工作台一侧的连接杆,其中连接杆的一侧设置有多个电动伸缩杆,多个电动伸缩杆的一侧均设置有夹持板,其中夹持板的一侧设置有硅胶片,并且硅胶片的表面开设有固定槽,其中固定槽的内部设置有固定块,并且固定块的顶部设置有把手。本技术能够对不同尺寸的工件进行夹持,从而提高实用性,并且可以对硅胶片进行拆卸替换,而且对材料达到步距定位的效果,提高了产品的精度和质量。
技术研发人员:袁兆丰,吴立松
受保护的技术使用者:昆山志竟轩金属制品有限公司
技术研发日:20240307
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!