支撑平台及焊接机器人组件的制作方法
本技术涉及建筑施工,具体涉及一种支撑平台及焊接机器人组件。
背景技术:
1、随着城市建设的快速发展,装配式建筑得到了大力推广,其中,钢结构因具有强度高、重量轻、抗震性能好等诸多有点而被广泛应用。在钢结构的安装过程中,往往需要对钢构件之间的连接处进行焊接固定,然而,在实际的施工过程中,由于焊工操作水平、人员之间配合、温度控制、工艺参数的不准确等原因,造成焊缝存在缺陷,无法满足质量要求。
技术实现思路
1、有鉴于此,本实用新型提供了一种支撑平台及焊接机器人组件,以解决由于人为因素,导致焊缝存在缺陷,无法满足质量要求的问题。
2、第一方面,本实用新型提供了一种支撑平台,包括:
3、轨道,环绕设置在钢构件的外周侧,轨道适于支撑自动化或半自动化施工设备;
4、磁性元件,适于吸附固定在钢构件的外周壁;
5、连接杆,一端与磁性元件固定连接,另一端与轨道相连接。
6、有益效果:轨道通过磁性元件和连接杆环绕设置在钢构件上,通过轨道支撑自动化或半自动化施工设备,以代替焊工进行焊接操作,从而避免由于人为因素导致焊缝存在缺陷,进而保证焊接质量。
7、在一种可选的实施方式中,轨道与连接杆活动连接,以沿径向调节轨道与钢构件之间的间距。
8、有益效果:通过轨道与连接杆活动连接,以便于调整轨道与磁性元件和钢构件之间的间距,从而适用于不同尺寸的钢构件,有利于提高支撑平台的适用性。
9、在一种可选的实施方式中,轨道上固定连接有固定块,固定块上开设有滑动孔,连接杆穿设于滑动孔中,以适于通过滑动孔与轨道形成滑动连接。
10、有益效果:通过在轨道上设置固定块,并通过在固定块上开始滑动孔,以使连接杆经由滑动孔与轨道形成滑动连接,从而避免在轨道上开孔,影响轨道的结构强度。
11、在一种可选的实施方式中,轨道和/或固定块上固定连接有传感器,传感器适于为自动化或半自动化施工设备提供检测信号。
12、有益效果:通过在轨道和/或固定块上固定连接传感器,以便于实时监测焊接情况,有利于提高自动化或半自动化施工设备的焊接精准度,从而提高焊接质量。
13、在一种可选的实施方式中,传感器包括距离传感器、温度传感器。
14、在一种可选的实施方式中,每种传感器的数量均包括至少一个。
15、有益效果:通过使每种传感器均设置多个,以便于提高监测焊接情况的可靠性。
16、在一种可选的实施方式中,轨道包括至少两个可拆卸连接的轨道段,多个轨道段适于通过依次连接以形成轨道。
17、有益效果:通过使轨道由多个可拆卸连接的轨道段连接构成,以便于轨道的拆装和周转使用。
18、在一种可选的实施方式中,磁性元件的数量包括至少一个,连接杆的数量与磁性元件的数量相适配,每个磁性元件均与一个连接杆固定连接。
19、有益效果:通过设置多个磁性元件和连接杆,以便于提高轨道与钢构件的连接稳定性。
20、第二方面,本实用新型还提供了一种焊接机器人组件,包括:
21、焊接机器人;
22、如上述的支撑平台,焊接机器人安装于支撑平台上,焊接机器人适于沿轨道环绕钢构件的外周侧移动。
23、有益效果:因为焊接机器人组件包括支撑平台,具有与支撑平台相同的效果,其有益效果在此不再赘述。
24、在一种可选的实施方式中,焊接机器人的数量包括至少一个。
25、本实施例提供的焊接机器人组件,通过设置多个焊接机器人以便于提高焊接效率,并且可以使多个焊接机器人同步进行焊接,以便于相互抵消焊接应力。
技术特征:
1.一种支撑平台,其特征在于,包括:
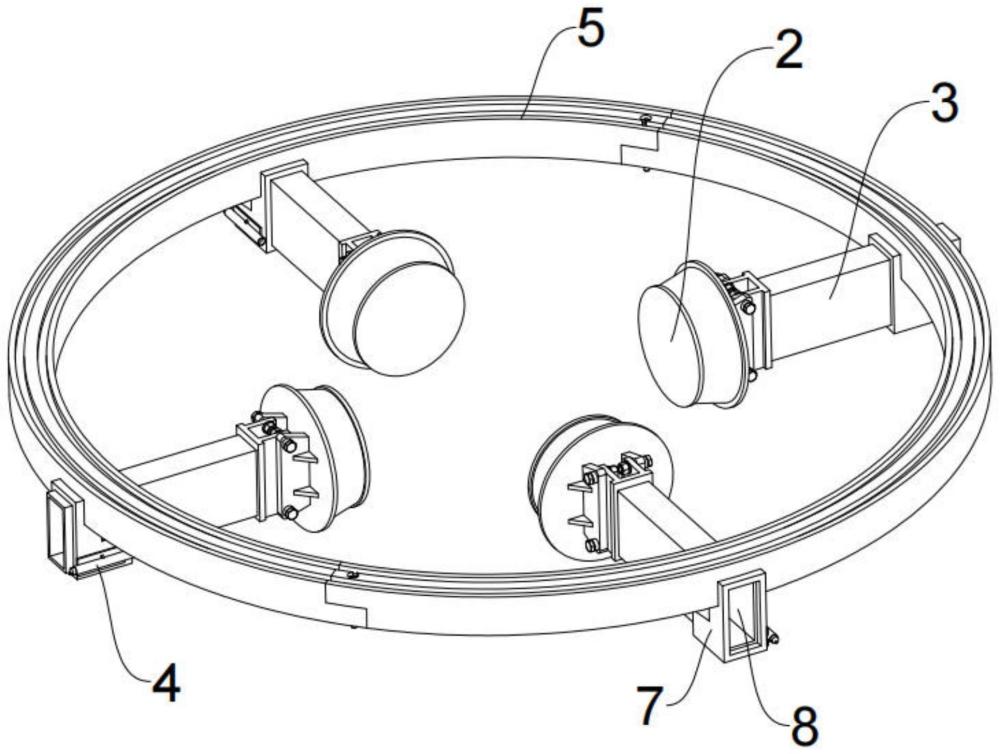
2.根据权利要求1所述的支撑平台,其特征在于,所述轨道(5)与所述连接杆(3)活动连接,以沿径向调节所述轨道(5)与所述钢构件(1)之间的间距。
3.根据权利要求2所述的支撑平台,其特征在于,所述轨道(5)上固定连接有固定块(7),所述固定块(7)上开设有滑动孔(8),所述连接杆(3)穿设于所述滑动孔(8)中,以适于通过所述滑动孔(8)与所述轨道(5)形成滑动连接。
4.根据权利要求3所述的支撑平台,其特征在于,所述轨道(5)和/或所述固定块(7)上固定连接有传感器(4),所述传感器(4)适于为所述自动化或半自动化施工设备提供检测信号。
5.根据权利要求4所述的支撑平台,其特征在于,所述传感器(4)包括距离传感器、温度传感器。
6.根据权利要求5所述的支撑平台,其特征在于,每种所述传感器(4)的数量均包括至少一个。
7.根据权利要求1所述的支撑平台,其特征在于,所述轨道(5)包括至少两个可拆卸连接的轨道段,多个所述轨道段适于通过依次连接以形成所述轨道(5)。
8.根据权利要求1所述的支撑平台,其特征在于,所述磁性元件(2)的数量包括至少一个,所述连接杆(3)的数量与所述磁性元件(2)的数量相适配,每个磁性元件(2)均与一个所述连接杆(3)固定连接。
9.一种焊接机器人组件,其特征在于,包括:
10.根据权利要求9所述的焊接机器人组件,其特征在于,所述焊接机器人(6)的数量包括至少一个。
技术总结
本技术涉及建筑施工技术领域,公开了一种支撑平台及焊接机器人组件,支撑平台包括:轨道,环绕设置在钢构件的外周侧,轨道适于支撑自动化或半自动化施工设备;磁性元件,适于吸附固定在钢构件的外周壁;连接杆,一端与磁性元件固定连接,另一端与轨道相连接。本技术提供的支撑平台,轨道通过磁性元件和连接杆环绕设置在钢构件上,通过轨道支撑自动化或半自动化施工设备,以代替焊工进行焊接操作,从而避免由于人为因素导致焊缝存在缺陷,进而保证焊接质量。
技术研发人员:房军轶,王鑫,吕向波,李玉磊,陈文鹏,赵胤天
受保护的技术使用者:中建钢构股份有限公司
技术研发日:20240319
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!