安装于生产线上的工件运输平台的制作方法
本技术涉及工件运输平台,尤其涉及一种可绝对固定的安装在生产线上的工件运输平台。
背景技术:
1、实现工业产品的自动化装配是提高生产效率的重要途径。工业产品通常具有多个零件,常见的工业产品自动装配生产线如公开号为cn204228244u,名称为超声波水表自动装配及检测生产线的实用新型专利所示。此类型的生产线通常具有循环的工作台、沿工作台依次分布的各个装配工位、空载工装板,其中空载工装板用于固定待装配的零部件并滑动连接至工作台上,空载工装板在各个装配工位之间循环移动依次完成产品各个零部件的加工。
2、上述公开的自动装配生产线的缺点在于:空载工装板滑动连接在生产线的导轨上,并通过链条牵引移动,空载工装板移动至其中一个装配工位进行装配时由于没有锁紧功能,在装配时受到外力会产生微小的移动,进而影响装配精度。
技术实现思路
1、技术目的:为了克服现有技术中存在的不足,本实用新型提供一种安装于生产线上的工件运输平台,可锁紧在生产线上。
2、技术方案:为实现上述目的,本实用新型公开的一种安装于生产线上的工件运输平台,包括:
3、基座,所述基座连接至生产线上,并与生产线的牵引组件连接,所述牵引组件带动基座在生产线上往复移动,所述基座具有卡槽;
4、锁紧组件,所述锁紧组件沿生产线分布,所述锁紧组件具有活动杆,所述活动杆可伸至所述卡槽内或伸出卡槽外。
5、优选地,所述锁紧组件包括固定座和转轴,所述固定座连接至生产线的机架上,所述转轴旋转连接至固定座,所述活动杆的一端与转轴连接,另一端可伸至所述卡槽内或伸出卡槽外,所述转轴旋转可带动活动杆摆动。
6、优选地,所述锁紧组件还包括驱动器和连杆,所述驱动器的一端连接至生产线的机架,所述驱动器具有可伸出或缩回的弹杆,所述驱动器的弹杆与连杆的一端连接,连杆的另一端与转轴连接。
7、优选地,所述活动杆伸至或伸出卡槽的一端连接有轴套;所述卡槽呈开放的u形。
8、优选地,所述牵引组件包括导轨和链条,所述基座连接有导轮和连接臂,所述导轮与导轨形成滚动连接,所述连接臂伸至链条的上方并通过卡板与链条连接。
9、优选地,所述导轮分成两排,并置于导轨相对的两侧。
10、优选地,所述基座上设置有用于固定工件的夹具。
11、本实用新型的公开的一种安装于生产线上的工件运输平台,具有以下技术效果:
12、该工件运输平台增加了锁紧组件,锁紧组件可将用于承载工件的基座绝对固定在生产线上,防止在装配过程中因基座产生微小移动而影响工件的装配精度。
技术特征:
1.一种安装于生产线上的工件运输平台,其特征在于,包括:
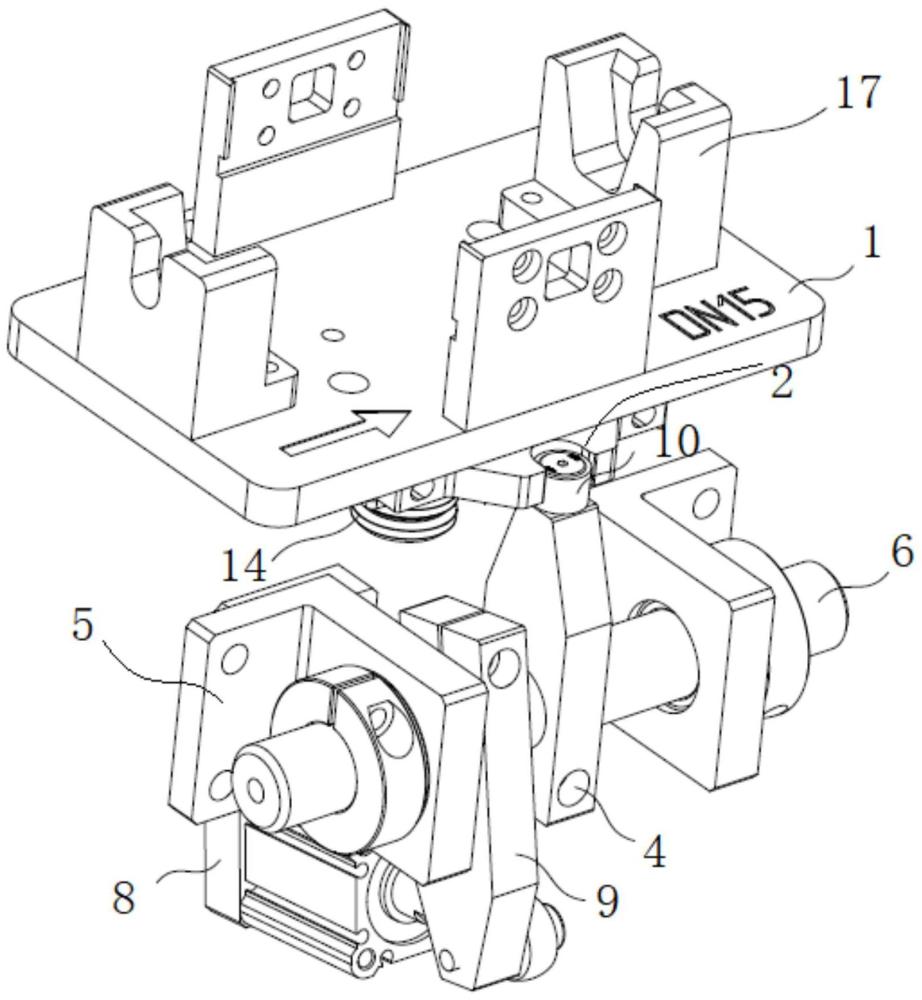
2.根据权利要求1所述的安装于生产线上的工件运输平台,其特征在于,所述锁紧组件(3)包括固定座(5)和转轴(6),所述固定座(5)连接至生产线的机架(7)上,所述转轴(6)旋转连接至固定座(5),所述活动杆(4)的一端与转轴(6)连接,另一端可伸至所述卡槽(2)内或伸出卡槽(2)外,所述转轴(6)旋转可带动活动杆(4)摆动。
3.根据权利要求2所述的安装于生产线上的工件运输平台,其特征在于,所述锁紧组件(3)还包括驱动器(8)和连杆(9),所述驱动器(8)的一端连接至生产线的机架(7),所述驱动器(8)具有可伸出或缩回的弹杆,所述驱动器(8)的弹杆与连杆(9)的一端连接,连杆(9)的另一端与转轴(6)连接。
4.根据权利要求2所述的安装于生产线上的工件运输平台,其特征在于,所述活动杆(4)伸至或伸出卡槽(2)的一端连接有轴套(10);所述卡槽(2)呈开放的u形。
5.根据权利要求1所述的安装于生产线上的工件运输平台,其特征在于,所述牵引组件包括导轨(12)和链条(13),所述基座(1)连接有导轮(14)和连接臂(15),所述导轮(14)与导轨(12)形成滚动连接,所述连接臂(15)伸至链条(13)的上方并通过卡板(16)与链条(13)连接。
6.根据权利要求5所述的安装于生产线上的工件运输平台,其特征在于,所述导轮(14)分成两排,并置于导轨(12)相对的两侧。
7.根据权利要求5所述的安装于生产线上的工件运输平台,其特征在于,所述基座(1)上设置有用于固定工件的夹具(17)。
技术总结
本技术涉及一种工件运输平台,尤其涉及一种安装于生产线上的工件运输平台,包括基座和锁紧组件,基座连接至生产线上,并与生产线的牵引组件连接,牵引组件带动基座在生产线上往复移动,基座具有卡槽,锁紧组件沿生产线分布,锁紧组件具有活动杆,活动杆可伸至卡槽内或伸出卡槽外。本技术公开的一种安装于生产线上的工件运输平台,能够防止在装配过程中因基座微小移动而影响装配精度。
技术研发人员:王宝全,曲仕文,孙鸣,杨征
受保护的技术使用者:山东三宇智能装备有限公司
技术研发日:20240408
技术公布日:2025/3/13
- 还没有人留言评论。精彩留言会获得点赞!