翻转焊接系统的制作方法
本技术涉及焊接,具体而言,涉及一种翻转焊接系统。
背景技术:
1、矿井单位生产过程中使用矿用单轨吊,矿用单轨吊横梁的焊接需要进行上下料和翻转,现有技术中采用人工进行上下料和翻转,使得操作过程中安全隐患较大,并且人工搬运不够平稳,使得矿用单轨吊横梁在搬运过程中容易移位,且人工搬运和翻转效率较低。
2、因此,需要一种能够自动完成上下料和翻转的翻转焊接系统。
技术实现思路
1、本实用新型提供了一种翻转焊接系统,以解决现有技术中的人工翻转搬运不平稳且效率低的问题。
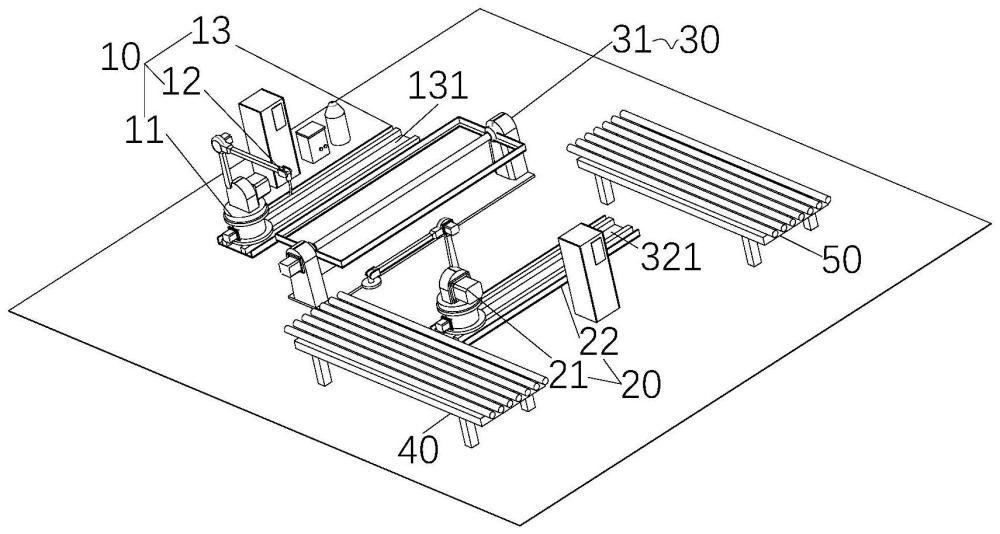
2、为了解决上述问题,本实用新型提供了一种翻转焊接系统,包括焊接部、翻转部和搬运部,焊接部用于对横梁进行焊接;翻转部设置在焊接部的下方,翻转部用于将一面焊接完成的横梁进行翻转,焊接部对于横梁的另一面进行焊接;搬运部用于将待焊接的横梁移动到翻转部或将横梁搬离翻转部。
3、采用本方案,搬运部将横梁搬运到翻转部,焊接部对横梁的一面进行焊接,翻转部将横梁翻转,焊接部对横梁的另一面进行焊接,搬运部将焊接完成的横梁搬离翻转部,从而完成了横梁的搬运和焊接。通过本方案,替代了人工搬运和翻转横梁,使得横梁的搬运更加平稳,横梁加工的效率更高。
4、进一步地,翻转部包括变位机,变位机夹持横梁将横梁进行翻转。
5、如此设置,变位机夹持横梁的两端,在焊接部将横梁的一面焊接完成后,变位机将横梁翻转,使得焊接部能够对横梁的另一面进行焊接。
6、进一步地,焊接部包括底座和焊接组件,焊接组件与底座连接,焊接组件对横梁进行焊接。
7、如此设置,焊接组件对于横梁进行焊接,底座用于固定焊接组件,使得焊接组件有一定的高度,能够适应翻转部的高度。
8、进一步地,焊接部还包括第一移轨,底座与第一移轨活动连接,底座沿第一移轨的长度方向往复移动,以完成横梁的焊接。
9、如此设置,底座沿第一移轨的长度方向往复移动,底座带动焊接组件沿第一移轨的长度方向移动,使得焊接组件能够沿横梁的长度方向移动,通过焊接组件的往复移动完成横梁的焊接。
10、进一步地,
11、第一移轨设置有第一凹槽,第一凹槽沿第一移轨的长度方向布置,底座具有第一凸起,第一凸起与第一凹槽滑动配合;或,
12、第一移轨具有第一凸起,第一凸起沿第一移轨的长度方向布置,底座具有第一凹槽,第一凹槽与第一凸起滑动配合。
13、如此设置,第一凹槽与第一凸起滑动配合,使得底座带动焊接组件沿第一移轨的长度方向往复移动。
14、进一步地,搬运部包括搬运机器人和第二移轨,搬运机器人与第二移轨活动连接,搬运机器人沿第二移轨的长度方向往复移动。
15、如此设置,搬运机器人沿第二移轨的长度方向往复移动,在第二移轨的两端分别进行搬运横梁到翻转部与将横梁搬离翻转部的工作,从而实现了横梁的自动搬运,避免了人工搬运导致的搬运不平稳。
16、进一步地,翻转焊接系统还包括第一平台,第一平台设置在第二移轨的一端,待焊接的横梁放置于第一平台,搬运机器人移动到第二移轨靠近第一平台的一端以将待焊接的横梁移动到翻转部。
17、如此设置,第一平台用于放置待焊接的横梁,便于搬运机器人对于横梁进行定位,使得搬运机器人能够精确锁定横梁的位置,将横梁熊第一平台移动到翻转部。
18、进一步地,翻转焊接系统还包括第二平台,第二平台设置在第二移轨的另一端,搬运机器人移动到第二移轨靠近第二平台的一端以将焊接完成的横梁搬运到第二平台。
19、如此设置,使得搬运机器人将横梁从搬运部搬离时能够精确锁定横梁放置的位置,焊接完成的横梁能够从翻转部20转移到第二平台进行放置。
20、进一步地,
21、第二移轨具有第二凹槽,第二凹槽沿第二移轨的长度方向布置,搬运机器人具有第二凸起,第二凸起与第二凹槽滑动配合;或,
22、第二移轨具有第二凸起,搬运机器人具有第二凹槽,第二凸起沿第二移轨的长度方向布置,第二凹槽与第二凸起滑动配合。
23、如此设置,第二凹槽与第二凸起滑动配合,使得搬运机器人沿第二移轨的长度方向往复运动。
24、进一步地,翻转焊接系统还包括围栏和光栅,围栏将翻转部、焊接部和搬运部包围,围栏用于防护,光栅设置于围栏,光栅用于监测他人是否靠近。
25、如此设置,围栏用于防护翻转部、焊接部和搬运部,避免有无关人员和机器靠近翻转焊接系统,影响翻转焊接系统的正常工作、造成安全隐患。光栅设置在围栏上,当光栅检测到有人进入围栏,触发警报或急停。
26、应用本实用新型的技术方案,提供了一种翻转焊接系统,包括焊接部、翻转部和搬运部,焊接部用于对横梁进行焊接;翻转部设置在焊接部的下方,翻转部用于将一面焊接完成的横梁进行翻转,焊接部对于横梁的另一面进行焊接;搬运部用于将待焊接的横梁移动到翻转部或将横梁搬离翻转部。采用本方案,搬运部将横梁搬运到翻转部,焊接部对横梁的一面进行焊接,翻转部将横梁翻转,焊接部对横梁的另一面进行焊接,搬运部将焊接完成的横梁搬离翻转部,从而完成了横梁的搬运和焊接。通过本方案,替代了人工搬运和翻转横梁,使得横梁的搬运更加平稳,横梁加工的效率更高。
技术特征:
1.一种翻转焊接系统,其特征在于,包括:
2.根据权利要求1所述的翻转焊接系统,其特征在于,所述翻转部(20)包括变位机(31),所述变位机(31)夹持所述横梁将所述横梁进行翻转。
3.根据权利要求1所述的翻转焊接系统,其特征在于,所述焊接部(10)包括底座(11)和焊接组件(12),所述焊接组件(12)与所述底座(11)连接,所述焊接组件(12)对所述横梁进行焊接。
4.根据权利要求3所述的翻转焊接系统,其特征在于,所述焊接部(10)还包括第一移轨(13),所述底座(11)与所述第一移轨(13)活动连接,所述底座(11)沿所述第一移轨(13)的长度方向往复移动,以完成所述横梁的焊接。
5.根据权利要求4所述的翻转焊接系统,其特征在于,
6.根据权利要求1所述的翻转焊接系统,其特征在于,所述搬运部(30)包括搬运机器人(21)和第二移轨(32),所述搬运机器人(21)与所述第二移轨(32)活动连接,所述搬运机器人(21)沿所述第二移轨(32)的长度方向往复移动。
7.根据权利要求6所述的翻转焊接系统,其特征在于,所述翻转焊接系统还包括第一平台(40),所述第一平台(40)设置在所述第二移轨(32)的一端,待焊接的所述横梁放置于所述第一平台(40),所述搬运机器人(21)移动到所述第二移轨(32)靠近所述第一平台(40)的一端以将待焊接的所述横梁移动到所述翻转部(20)。
8.根据权利要求7所述的翻转焊接系统,其特征在于,所述翻转焊接系统还包括第二平台(50),所述第二平台(50)设置在所述第二移轨(32)的另一端,所述搬运机器人(21)移动到所述第二移轨(32)靠近所述第二平台(50)的一端以将焊接完成的所述横梁搬运到所述第二平台(50)。
9.根据权利要求6所述的翻转焊接系统,其特征在于,
10.根据权利要求1所述的翻转焊接系统,其特征在于,所述翻转焊接系统还包括围栏和光栅,所述围栏将所述翻转部(20)、焊接部(10)和搬运部(30)包围,所述围栏用于防护,所述光栅设置于所述围栏,所述光栅用于监测他人是否靠近。
技术总结
本技术提供了一种翻转焊接系统,包括焊接部、翻转部和搬运部,焊接部用于对横梁进行焊接;翻转部设置在焊接部的下方,翻转部用于将一面焊接完成的横梁进行翻转,焊接部对于横梁的另一面进行焊接;搬运部用于将待焊接的横梁移动到翻转部或将横梁搬离翻转部。采用本方案,搬运部将横梁搬运到翻转部,焊接部对横梁的一面进行焊接,翻转部将横梁翻转,焊接部对横梁的另一面进行焊接,搬运部将焊接完成的横梁搬离翻转部,从而完成了横梁的搬运和焊接。通过本方案,替代了人工搬运和翻转横梁,使得横梁的搬运更加平稳,横梁加工的效率更高。
技术研发人员:魏子良,王亚军,王小乐,霍朝霞,王亚,房敏,牛明明,曲海东,陈龙
受保护的技术使用者:国能神东煤炭集团有限责任公司
技术研发日:20240411
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!