机器人上下料工作站的制作方法
本技术属于机械,涉及一种机器人上下料工作站。
背景技术:
1、机加工过程中,需要将待加工工件或者毛坯上料至机床处,经过机床加工后获得加工后的工件,再将加工后工件进行下料,上料前的工件和下料后的工件往往分开放置。
2、之前,对工件进行上料和下料往往需要人工进行操作,不仅操作过程较为枯燥,疲劳度高,且上下料的效率不佳,甚至存在一定的安全隐患。
3、而随着科技的不断发展,自动化和智能化程度也不断地提高,机械手和机器人等能进行自动上下料的装置的出现,能大大提高上下料效率。相应的,设计一款与机械手和机器人配合使用的料盘等结构能进一步提高上下料的效率。
技术实现思路
1、本实用新型的目的是针对现有技术存在的上述问题,提出了一种机器人上下料工作站,解决了现有机器人上下料效率不足的问题。
2、本实用新型的目的可通过下列技术方案来实现:
3、机器人上下料工作站,包括工作台以及连接在工作台上的机器人,其特征在于,机器人上下料工作站还包括驱动件、均呈板状的料盘一和料盘二以及固定于工作台顶部的导轨一和导轨二,所述料盘一和料盘二均水平设置于所述工作台上方且料盘一的位置高于料盘二的位置,所述料盘一能在驱动件的驱动下沿导轨一移动至工作位,所述料盘二能在驱动件的驱动下沿导轨二移动至工作位,所述工作台上还开设有穿设孔,所述工作台上围绕穿设孔开设有数个安装孔,所述机器人通过穿设于安装孔处的紧固件连接在所述工作台上。
4、本机器人上下料工作站工作时,可将待加工工件放置在料盘一和料盘二上,由同样固定在工作台上的机器人抓取料盘一和料盘二上的工件并送往加工机床进行加工。这里,工作位为待抓取工件的位置,料盘一和料盘二一高一低,可在驱动件的驱动下交替地移动至工作位来供机器人抓取。例如,当料盘一移动至工作位时,料盘二退出工作位,可进行单独的工件上料,反之,料盘一处上料完成后可退出工作位,将放满工件的料盘二输送至工作位待抓取工件,两个料盘交替送料,减少上料间隙,提高上料效率。此外,机器人与料盘一和料盘二共同连接在工作台上,可使工作位和机器人保持相对固定的位置和距离关系,方便机器人精确地抓取工件,进一步提高上料效率。工作台上的穿设孔可用于供机器人的连接线束穿过,方便线束内置,使得结构更紧凑。
5、在上述的机器人上下料工作站中,所述工作台包括送料台以及固定在所述送料台侧部的安装台,上述导轨一和导轨二固定于所述送料台的顶部,所述机器人固定于所述安装台的顶部,所述安装台的顶面不高于所述送料台的顶面。将工作台分为送料台和安装台,使得导轨和料盘的结构与机器人分开,不仅避免干涉,方便安装,还可根据实际机器人的高度等参数,使得安装台的台面低于送料台,进而缩短机器人抓取工件时的运动行程,提高上料效率。
6、在上述的机器人上下料工作站中,所述导轨一和导轨二均为直线导轨,且相互平行设置,所述导轨一和导轨二的数量均为两个且两个导轨二设置于两个导轨一之间,所述料盘一两端通过支架一滑动连接在导轨一上,所述料盘二两端通过支架二滑动连接在导轨二上,且料盘二的宽度小于所述料盘一两端支架一之间的宽度。料盘二和料盘一相向移动时,料盘二能自料盘一下方的支架一处穿过,实现位置的交替。
7、在上述的机器人上下料工作站中,所述工作台上设置有皮带轮和绕设在皮带轮上的皮带,所述支架一和支架二均与所述皮带固定,所述驱动件为驱动电机且与所述皮带轮连接并能驱动皮带轮周向转动。支架一和支架二同时与皮带固定,使得一个驱动电机即可带动料盘一和料盘二移动,简化驱动结构。
8、在上述的机器人上下料工作站中,所述工作台侧部铰接有柜门,所述柜门的外侧固定有拉手,所述柜门上朝向工作台的一侧固定有磁铁,所述工作台上与所述磁铁位置对应处采用磁性材料制成。柜门的设置,可方便将驱动电机以及相应的控制电路置于工作台内,而柜门可通过磁铁吸附固定,实现关紧,这里,磁性材料具体是指铁等能与磁铁之间产生磁吸力的材料。
9、在上述的机器人上下料工作站中,所述工作台底部设置有数个支脚,数个所述支脚通过竖直设置的调节螺杆螺纹连接在工作台的底部。通过调节螺杆的螺纹连接,可调节数个支脚与工作台连接的位置高度,进而调节工作台的水平度,保证机器人抓取工件的精度。
10、与现有技术相比,本机器人上下料工作站具有以下优点:
11、1、通过两个料盘交替送料,减少上料间隙,提高了上料效率。
12、2、机器人与料盘一和料盘二共同连接在工作台上,可使工作位和机器人保持相对固定的位置和距离关系,方便机器人精确地抓取工件,进一步提高上料效率。
13、3、工作台上的穿设孔可用于供机器人的连接线束穿过,方便线束内置,使得结构更紧凑。
技术特征:
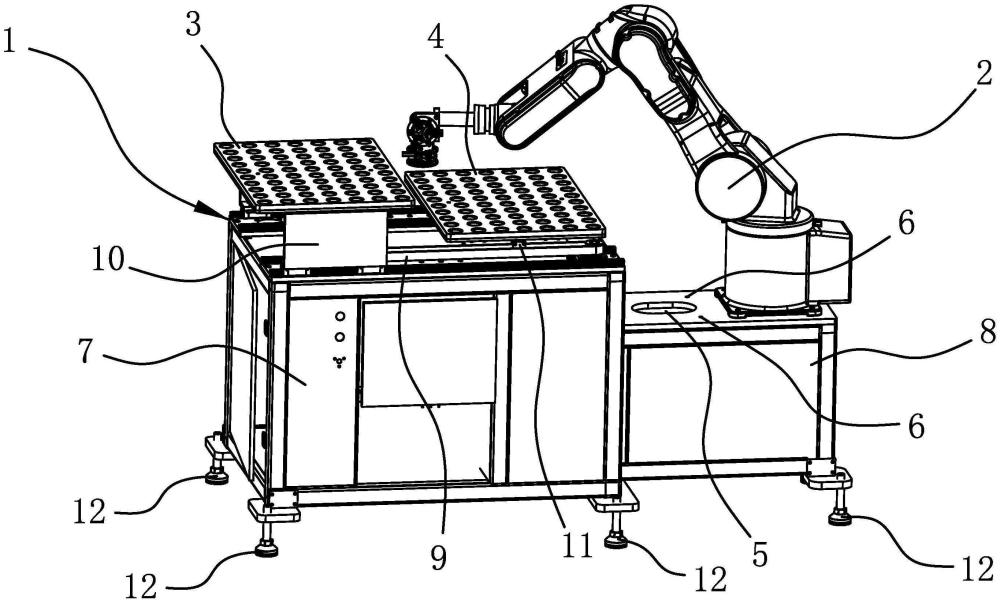
1.机器人上下料工作站,包括工作台(1)以及连接在工作台(1)上的机器人(2),其特征在于,机器人上下料工作站还包括驱动件、均呈板状的料盘一(3)和料盘二(4)以及固定于工作台(1)顶部的导轨一和导轨二,所述料盘一(3)和料盘二(4)均水平设置于所述工作台(1)上方且料盘一(3)的位置高于料盘二(4)的位置,所述料盘一(3)能在驱动件的驱动下沿导轨一移动至工作位,所述料盘二(4)能在驱动件的驱动下沿导轨二移动至工作位,所述工作台(1)上还开设有穿设孔(5),所述工作台(1)上围绕穿设孔(5)开设有数个安装孔(6),所述机器人(2)通过穿设于安装孔(6)处的紧固件连接在所述工作台(1)上。
2.根据权利要求1所述的机器人上下料工作站,其特征在于,所述工作台(1)包括送料台(7)以及固定在所述送料台(7)侧部的安装台(8),上述导轨一和导轨二固定于所述送料台(7)的顶部,所述机器人(2)固定于所述安装台(8)的顶部,所述安装台(8)的顶面不高于所述送料台(7)的顶面。
3.根据权利要求2所述的机器人上下料工作站,其特征在于,所述导轨一和导轨二均为直线导轨,且相互平行设置,所述导轨一和导轨二的数量均为两个且两个导轨二设置于两个导轨一之间,所述料盘一(3)两端通过支架一(10)滑动连接在导轨一上,所述料盘二(4)两端通过支架二(11)滑动连接在导轨二上,且料盘二(4)的宽度小于所述料盘一(3)两端支架一(10)之间的宽度。
4.根据权利要求3所述的机器人上下料工作站,其特征在于,所述工作台(1)上设置有皮带轮和绕设在皮带轮上的皮带(9),所述支架一(10)和支架二(11)均与所述皮带(9)固定,所述驱动件为驱动电机且与所述皮带轮连接并能驱动皮带轮周向转动。
5.根据权利要求1-4中任意一项所述的机器人上下料工作站,其特征在于,所述工作台(1)侧部铰接有柜门,所述柜门的外侧固定有拉手,所述柜门上朝向工作台(1)的一侧固定有磁铁,所述工作台(1)上与所述磁铁位置对应处采用磁性材料制成。
6.根据权利要求1-4中任意一项所述的机器人上下料工作站,其特征在于,所述工作台(1)底部设置有数个支脚(12),数个所述支脚(12)通过竖直设置的调节螺杆螺纹连接在工作台(1)的底部。
技术总结
本技术提供了机器人上下料工作站,属于机械技术领域。它解决了现有机器人上下料效率不足的问题。本机器人上下料工作站,包括工作台以及连接在工作台上的机器人,机器人上下料工作站还包括驱动件、均呈板状的料盘一和料盘二以及固定于工作台顶部的导轨一和导轨二,所述料盘一和料盘二均水平设置于所述工作台上方且料盘一的位置高于料盘二的位置,所述料盘一能在驱动件的驱动下沿导轨一移动至工作位,所述料盘二能在驱动件的驱动下沿导轨二移动至工作位,所述工作台上还开设有穿设孔,所述工作台上围绕穿设孔开设有数个安装孔,所述机器人通过穿设于安装孔处的紧固件连接在所述工作台上。本机器人上下料工作站具有送料效率高的优点。
技术研发人员:陈小建,金长友,廖晓霞
受保护的技术使用者:浙江名机优选科技有限公司
技术研发日:20240415
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!