一种柔性机器人超声波焊接设备的制作方法
本技术涉及焊接,具体来说,涉及一种柔性机器人超声波焊接设备。
背景技术:
1、超声波焊接的原理是利用超声波发生器产生的高频高压信号,通过换能系统转化为高频机械振动,传递到工件表面,使其温度升高将其表面分子结构被破坏,从而实现之间工件之间的连接。超声波焊接因其速度快、质量好、无污染、操作简便的优点在工业生产中使用的越来越频繁。
2、经检索中国专利cn213646300u所公开的一种柔性机器人超声波焊接设备,通过设置焊接治具,焊接治具用于焊接件夹持固定,焊接底座前方左右两侧安装有焊接机器手,焊接机器手输出端安装有超声波焊接头,用于焊接件焊接作业,焊接效果好,控制方便,焊接件夹紧效果好,操作简单,设备支撑稳定性好,设备保护效果好。
3、但是,一种柔性机器人超声波焊接设备仍存在一些不足,该专利通过设置焊接治具保证焊接件的夹紧效果,但是通常焊接操作为一对一完成,即当焊接操作完成后工作人员对焊接完成的工件进行拿取,刚焊接完成的工件温度较高,不便于工作人员进行拿取,导致焊接整体效率过低,,增大了焊接操作周期。针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本实用新型提出一种柔性机器人超声波焊接设备,以克服现有相关技术所存在的上述技术问题。
2、为此,本实用新型采用的具体技术方案如下:
3、一种柔性机器人超声波焊接设备,包括底座,底座上方设有焊接台,焊接台与底座之间设有移动机构,焊接台顶端设有固定机构,焊接台底座一侧设有底板,底板上方设有焊接机器手,焊接机器手与控制器电性连接,控制器设于底座一侧,底座上方设有散热机构。
4、进一步的,为了将焊接完成的工件进行移动,移动机构包括设于底座的滑槽,滑槽内部设有螺纹杆,螺纹杆一端通过轴承与底座相连接,另一端穿过底座与驱动电机输出端相连接,螺纹杆上螺纹连接有滑块,滑块与焊接台相连接,螺纹杆两侧设有固定杆,固定杆两端与底座相连接。
5、进一步的,为了能够对工件进行固定,防止在焊接过程中工件发生移动,影响工件焊接精度,固定机构包括设于焊接台底端的液压杆,液压杆顶端与移动板相连接,移动板上设有移动杆,移动杆的数量为两个,移动杆一端穿过焊接台与连接杆相连接,连接杆顶端设有固定板,连接杆与移动杆之间通过轴承相连接,移动杆外侧设有限位机构。
6、进一步的,为了对固定板的旋转角度进行限定,限位机构包括设于移动杆外侧的固定环,固定环顶端设有弹簧,弹簧一端与移动环相连接,移动环顶端设有卡块,固定板内部设有卡槽,卡块与卡槽相匹配。
7、进一步的,移动环内部设有限位块,移动杆上设有限位槽,限位块与限位槽相匹配。
8、进一步的,散热机构包括设于底座上方的支撑架,支撑架上方设有散热风扇。
9、进一步的,移动板与限位杆贯穿连接,限位杆两端与焊接台相连接。
10、本实用新型的有益效果为:
11、(1)、通过设置移动机构,当对一个工件焊接完成之后,通过启动驱动电机,带动焊接台进行移动,方便焊接机器手对下一个工件进行焊接,并且通过设置散热风扇,能够对焊接完成的工件进行降温,方便工作人员进行拿取,保证焊接设备整体的工作效率,减少焊接操作周期。
12、(2)、通过设置固定机构,通过设置可旋转的固定板,方便对工件进行放置,并且通过在液压杆的作用下,能够是固定板对工件进行压紧,防止在焊接过程中工件发生移动,影响焊接精度。
技术特征:
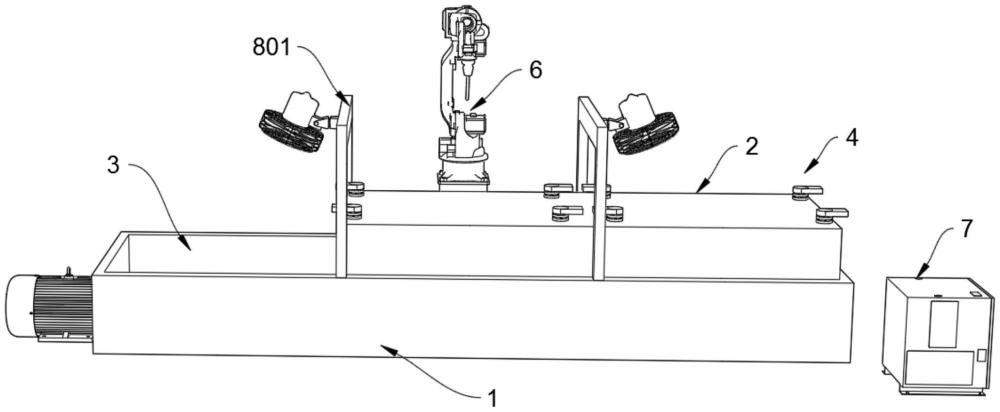
1.一种柔性机器人超声波焊接设备,其特征在于,包括底座(1),所述底座(1)上方设有焊接台(2),所述焊接台(2)与底座(1)之间设有移动机构(3),所述焊接台(2)顶端设有固定机构(4),所述焊接台(2)底座(1)一侧设有底板(5),所述底板(5)上方设有焊接机器手(6),所述焊接机器手(6)与控制器(7)电性连接,所述控制器(7)设于底座(1)一侧,所述底座(1)上方设有散热机构(8)。
2.根据权利要求1所述的一种柔性机器人超声波焊接设备,其特征在于,所述移动机构(3)包括设于底座(1)的滑槽(301),所述滑槽(301)内部设有螺纹杆(302),所述螺纹杆(302)一端通过轴承与底座(1)相连接,另一端穿过底座(1)与驱动电机(303)输出端相连接,所述螺纹杆(302)上螺纹连接有滑块(304),所述滑块(304)与焊接台(2)相连接,所述螺纹杆(302)两侧设有固定杆(305),所述固定杆(305)两端与底座(1)相连接。
3.根据权利要求1所述的一种柔性机器人超声波焊接设备,其特征在于,所述固定机构(4)包括设于焊接台(2)底端的液压杆(401),所述液压杆(401)顶端与移动板(402)相连接,所述移动板(402)上设有移动杆(403),所述移动杆(403)的数量为两个,所述移动杆(403)一端穿过焊接台(2)与连接杆(404)相连接,所述连接杆(404)顶端设有固定板(405),所述连接杆(404)与移动杆(403)之间通过轴承相连接,所述移动杆(403)外侧设有限位机构(9)。
4.根据权利要求3所述的一种柔性机器人超声波焊接设备,其特征在于,所述限位机构(9)包括设于移动杆(403)外侧的固定环(901),所述固定环(901)顶端设有弹簧(902),所述弹簧(902)一端与移动环(903)相连接,所述移动环(903)顶端设有卡块(904),所述固定板(405)内部设有卡槽(905),所述卡块(904)与卡槽(905)相匹配。
5.根据权利要求4所述的一种柔性机器人超声波焊接设备,其特征在于,所述移动环(903)内部设有限位块(10),所述移动杆(403)上设有限位槽(11),所述限位块(10)与限位槽(11)相匹配。
6.根据权利要求1所述的一种柔性机器人超声波焊接设备,其特征在于,所述散热机构(8)包括设于底座(1)上方的支撑架(801),所述支撑架(801)上方设有散热风扇(802)。
7.根据权利要求3所述的一种柔性机器人超声波焊接设备,其特征在于,所述移动板(402)与限位杆(12)贯穿连接,所述限位杆(12)两端与焊接台(2)相连接。
技术总结
本技术公开了一种柔性机器人超声波焊接设备,包括底座,底座上方设有焊接台,焊接台与底座之间设有移动机构,焊接台顶端设有固定机构,焊接台底座一侧设有底板,底板上方设有焊接机器手,焊接机器手与控制器电性连接,控制器设于底座一侧,底座上方设有散热机构,本技术通过上述机构的相互配合,通过设置移动机构,当对一个工件焊接完成之后,通过启动驱动电机,带动焊接台进行移动,方便焊接机器手对下一个工件进行焊接,并且通过设置散热风扇,能够对焊接完成的工件进行降温,方便工作人员进行拿取,保证焊接设备整体的工作效率,减少焊接操作周期。
技术研发人员:俞董卫,苏砚军
受保护的技术使用者:武汉众和时利自动化科技有限公司
技术研发日:20240510
技术公布日:2025/3/16
- 还没有人留言评论。精彩留言会获得点赞!