一种机器人用高精密焊接支撑座的制作方法
本技术涉及支撑座,具体地说,涉及一种机器人用高精密焊接支撑座。
背景技术:
1、机器人用高精密焊接支撑座是一种专门设计用于支撑和定位焊接工件的装置,它通常与机器人焊接系统配合使用,以提高焊接的精度和效率。这种支撑座能够确保工件在焊接过程中的稳定性和准确性,从而保证焊接质量。
2、常见的支撑座需要在满足对工件支撑的同时还需要对工件进行定位夹持,但是支撑座在不使用时,其顶部暴露在空气中,空气中的灰尘会附着在支撑座顶部,灰尘会影响对工件支撑以及夹持的精度,所以需要一种机器人用高精密焊接支撑座。
技术实现思路
1、针对现有技术中存在的问题,本实用新型的目的在于提供一种机器人用高精密焊接支撑座,以解决背景技术问题。
2、为实现上述目的,本实用新型采用如下的技术方案;
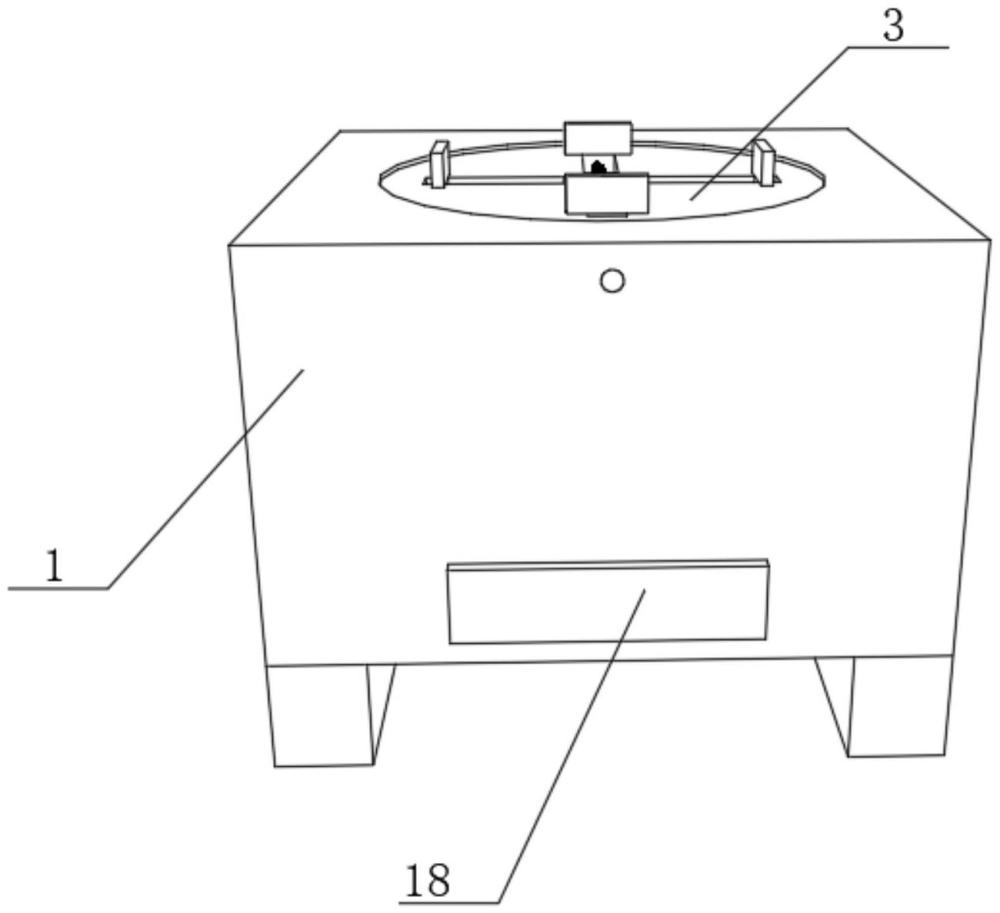
3、一种机器人用高精密焊接支撑座,包括底座,所述底座的顶部开设有半圆槽,所述半圆槽的内壁转动连接有置物板,所述底座的背面固定连接有电机,所述电机的输出轴与置物板固定连接,所述置物板的顶部开设有环形分布的滑槽,所述滑槽的内壁固定连接有滑杆,所述滑杆上套设有与其滑动连接的滑块和弹簧,所述滑块的顶部固定连接有夹板,所述置物板的底部固定连接有环形分布的电动推杆,所述电动推杆的底端固定连接有升降块,所述升降块的顶部固定连接有拉绳,所述拉绳的另一端贯穿置物板并与滑块固定连接。
4、作为上述技术方案的进一步描述:
5、所述底座上开设有环形腔体,所述环形腔体的内壁嵌设有风机,所述风机的右侧贯穿并延伸至底座的右侧,所述环形腔体的内壁开设有两组等距离排列的出气孔,所述底座的底部开设有出气槽,所述出气槽的内壁开设有两个与半圆槽相连通的排气孔。
6、作为上述技术方案的进一步描述:
7、所述底座的正面穿插有与其滑动连接的过滤盒,所述过滤盒的外侧与出气槽的内壁滑动连接。
8、作为上述技术方案的进一步描述:
9、所述排气孔的内壁开设有导向槽,所述导向槽的形状呈喇叭形设置,所述升降块的底部固定连接有与排气孔相适配的插杆。
10、作为上述技术方案的进一步描述:
11、所述置物板上套设有与其固定连接的密封环,所述密封环的外侧与半圆槽相接触。
12、相比于现有技术,本实用新型的优点在于:
13、本方案在不需要使用该支撑座时,对用于与工件接触的部件进行防尘以及除尘处理,进而有效的避免下次对工件进行支撑夹持时,灰尘对支撑夹持造成的影响,进而提升对工件支撑以及夹持的精度。
技术特征:
1.一种机器人用高精密焊接支撑座,包括底座(1),其特征在于:所述底座(1)的顶部开设有半圆槽(2),所述半圆槽(2)的内壁转动连接有置物板(3),所述底座(1)的背面固定连接有电机(4),所述电机(4)的输出轴与置物板(3)固定连接,所述置物板(3)的顶部开设有环形分布的滑槽(5),所述滑槽(5)的内壁固定连接有滑杆(6),所述滑杆(6)上套设有与其滑动连接的滑块(7)和弹簧(8),所述滑块(7)的顶部固定连接有夹板(9),所述置物板(3)的底部固定连接有环形分布的电动推杆(10),所述电动推杆(10)的底端固定连接有升降块(11),所述升降块(11)的顶部固定连接有拉绳(12),所述拉绳(12)的另一端贯穿置物板(3)并与滑块(7)固定连接。
2.根据权利要求1所述的一种机器人用高精密焊接支撑座,其特征在于:所述底座(1)上开设有环形腔体(13),所述环形腔体(13)的内壁嵌设有风机(14),所述风机(14)的右侧贯穿并延伸至底座(1)的右侧,所述环形腔体(13)的内壁开设有两组等距离排列的出气孔(15),所述底座(1)的底部开设有出气槽(16),所述出气槽(16)的内壁开设有两个与半圆槽(2)相连通的排气孔(17)。
3.根据权利要求2所述的一种机器人用高精密焊接支撑座,其特征在于:所述底座(1)的正面穿插有与其滑动连接的过滤盒(18),所述过滤盒(18)的外侧与出气槽(16)的内壁滑动连接。
4.根据权利要求2所述的一种机器人用高精密焊接支撑座,其特征在于:所述排气孔(17)的内壁开设有导向槽(19),所述导向槽(19)的形状呈喇叭形设置,所述升降块(11)的底部固定连接有与排气孔(17)相适配的插杆(20)。
5.根据权利要求1所述的一种机器人用高精密焊接支撑座,其特征在于:所述置物板(3)上套设有与其固定连接的密封环(21),所述密封环(21)的外侧与半圆槽(2)相接触。
技术总结
本技术公开了一种机器人用高精密焊接支撑座,包括底座,所述底座的顶部开设有半圆槽,所述半圆槽的内壁转动连接有置物板,所述底座的背面固定连接有电机,所述电机的输出轴与置物板固定连接,所述置物板的顶部开设有环形分布的滑槽,所述滑槽的内壁固定连接有滑杆,所述滑杆上套设有与其滑动连接的滑块和弹簧,所述滑块的顶部固定连接有夹板,所述置物板的底部固定连接有环形分布的电动推杆。该技术,在不需要使用该支撑座时,对用于与工件接触的部件进行防尘以及除尘处理,进而有效的避免下次对工件进行支撑夹持时,灰尘对支撑夹持造成的影响,进而提升对工件支撑以及夹持的精度。
技术研发人员:高广志,李洪涛,张达凯
受保护的技术使用者:三河迈威森精密机械设备有限公司
技术研发日:20240606
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!