一种夹爪组件的制作方法
1.本实用新型涉及刀具研磨中刀具夹持转运技术领域,尤其涉及一种夹持组件。
背景技术:
2.刀具在研磨过程中,需要夹持件协助刀具完成不同工位之间的转运,而现有的夹持件夹爪在碰触刀具的瞬间具有较大冲击力,对刀具产生破坏力,影响刀具的产品质量,不符合生产要求。
技术实现要素:
3.为了克服现有技术中存在的缺点,本实用新型的目的在于提供一种夹持组件,缓冲夹爪运动速度,提高生产质量。
4.为实现上述目的,本实用新型的技术方案为:
5.一种夹爪组件,包括机架、第一传动件、第二传动件及夹爪组件;
6.所述夹爪组件包括安装板、隔板、夹爪升降驱动件、滑板、夹爪及弹性件;所述隔板设于安装板,所述夹爪升降驱动件设于安装板,所述滑板滑动连接于隔板,所述夹爪设于滑板,所述弹性件的两端分别连接夹爪升降驱动件和滑板;
7.所述第一传动件设于机架并驱动第二传动件运动,所述第二传动件驱动安装板运动。
8.进一步的,所述弹性件包括弹性座,所述弹性座设于滑板。
9.进一步的,所述夹爪组件还包括连接杆,所述弹性件套设于连接杆,所述连接杆的一端固定连接于夹爪升降驱动件,所述连接杆的另一端滑动连接于弹性座。
10.进一步的,所述连接杆包括上限位件及导柱,所述弹性座设有通孔供导柱穿过,所述弹性件套设于导柱,所述弹性件的两端分别与上限位件和弹性座抵接。
11.进一步的,所述夹爪升降驱动件、滑板、夹爪及弹性件的数量均为两个,一个夹爪安装于一个滑板,一个夹爪升降驱动件驱动一个滑板升降,一个弹性件安装于一个滑板。
12.本实用新型的有益效果:通过设置弹性件,起到缓冲夹爪运动速度的目的,提高生产质量。
附图说明
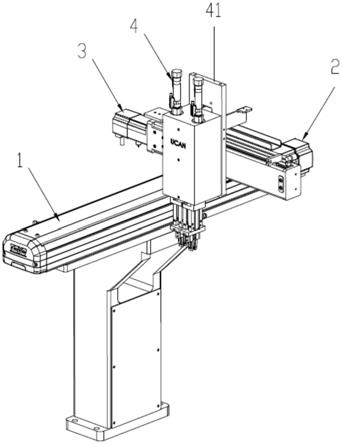
13.图1为本实用新型的立体结构示意图;
14.图2为本实用新型的夹爪组件拆分结构示意图;
15.图3为本实用新型的连接杆、弹性件、弹性座拆分结构示意图。
16.附图标记包括:
17.1—机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—第一传动件
ꢀꢀꢀꢀꢀꢀꢀ
3—第二传动件
18.4—夹爪组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41—安装板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42—隔板
19.43—夹爪升降驱动件
ꢀꢀꢀ
44—滑板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
45—夹爪
20.46—弹性件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
461—弹性座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
47—连接杆
21.471—上限位件
ꢀꢀꢀꢀꢀꢀꢀꢀ
472—导柱。
具体实施方式
22.为了便于本领域技术人员的理解,下面结合实施例及附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
23.请参阅图1至图3,本实用新型的一种夹爪组件,包括机架1、第一传动件2、第二传动件3及夹爪组件4;
24.所述夹爪组件4包括安装板41、隔板42、夹爪升降驱动件43、滑板44、夹爪45及弹性件46;所述隔板42设于安装板41,所述夹爪升降驱动件43设于安装板41,所述滑板44滑动连接于隔板42,所述夹爪45设于滑板44,所述弹性件46的两端分别连接夹爪升降驱动件43和滑板44;
25.所述第一传动件2设于机架1并驱动第二传动件3运动,所述第二传动件3 驱动安装板41运动。
26.具体的,本实施例中,第一传动件2为气缸源,驱动第二传动件3沿机架1 的长度方向运动,第二传动件3包括气缸源及支架,支架滑动连接于机架1,夹爪升降驱动件43滑动连接于支架,第二传动件3驱动夹爪升降驱动件43沿支架的长度方向运动,支架的长度方向与机架1的长度方向垂直相交,夹爪升降驱动件43驱动滑板44升降运动,实现夹爪45在x、y、z三向的位置调整,当夹爪45碰触到待夹持的刀具时,弹性件46的设置,使得夹爪45放慢速度起到缓冲的作用,避免夹爪升降驱动件43产生的驱动力对待夹持的刀具产生瞬间撞击力,避免对刀具产生破坏力,提高生产的安全性。
27.通过设置弹性件46,起到缓冲夹爪45运动速度的目的,提高生产质量。
28.所述弹性件46包括弹性座461,所述弹性座461设于滑板44,弹性座461的设置,方便安装及更换弹性件46,确保生产的安全性。
29.所述夹爪组件4还包括连接杆47,所述弹性件46套设在连接杆47,所述连接杆47的一端固定连接于夹爪升降驱动件43,所述连接杆47的另一端滑动连接于弹性座461,连接杆47具有导向作用,确保缓冲力的方向稳定性。
30.所述连接杆47包括上限位件471及导柱472,所述弹性座461设有通孔供导柱472穿过,所述弹性件46套设于导柱472,所述弹性件46的两端分别与上限位件471和弹性座461抵接,上限位件471和弹性座461的设置,使得弹性件46 在有限的空间内活动,确保生产的可控性。
31.所述夹爪升降驱动件43、滑板44、夹爪45及弹性件46的数量均为两个,一个夹爪45安装于一个滑板44,一个夹爪升降驱动件43驱动一个滑板44升降,一个弹性件46安装于一个滑板44,两个夹爪45的分别独立控制,起到独自升降夹持刀具或释放刀具的目的,满足不同生产要求。
32.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种夹爪组件,其特征在于:包括机架(1)、第一传动件(2)、第二传动件(3)及夹爪组件(4);所述夹爪组件(4)包括安装板(41)、隔板(42)、夹爪升降驱动件(43)、滑板(44)、夹爪(45)及弹性件(46);所述隔板(42)设于安装板(41),所述夹爪升降驱动件(43)设于安装板(41),所述滑板(44)滑动连接于隔板(42),所述夹爪(45)设于滑板(44),所述弹性件(46)的两端分别连接夹爪升降驱动件(43)和滑板(44);所述第一传动件(2)设于机架(1)并驱动第二传动件(3)运动,所述第二传动件(3)驱动安装板(41)运动。2.根据权利要求1所述的夹爪组件,其特征在于:所述弹性件(46)包括弹性座(461),所述弹性座(461)设于滑板(44)。3.根据权利要求2所述的夹爪组件,其特征在于:所述夹爪组件(4)还包括连接杆(47),所述弹性件(46)套设于连接杆(47),所述连接杆(47)的一端固定连接于夹爪升降驱动件(43),所述连接杆(47)的另一端滑动连接于弹性座(461)。4.根据权利要求3所述的夹爪组件,其特征在于:所述连接杆(47)包括上限位件(471)及导柱(472),所述弹性座(461)设有通孔供导柱(472)穿过,所述弹性件(46)套设于导柱(472),所述弹性件(46)的两端分别与上限位件(471)和弹性座(461)抵接。5.根据权利要求1所述的夹爪组件,其特征在于:所述夹爪升降驱动件(43)、滑板(44)、夹爪(45)及弹性件(46)的数量均为两个,一个夹爪(45)安装于一个滑板(44),一个夹爪升降驱动件(43)驱动一个滑板(44)升降,一个弹性件(46)安装于一个滑板(44)。
技术总结
本实用新型涉及刀具研磨中刀具夹持转运技术领域,尤其涉及一种夹持组件,包括机架、第一传动件、第二传动件及夹爪组件;所述夹爪组件包括安装板、隔板、夹爪升降驱动件、滑板、夹爪及弹性件;所述隔板设于安装板,所述夹爪升降驱动件设于安装板,所述滑板滑动连接于隔板,所述夹爪设于滑板,所述弹性件的两端分别连接夹爪升降驱动件和滑板;所述第一传动件设于机架并驱动第二传动件运动,所述第二传动件驱动安装板运动;通过设置弹性件,起到缓冲夹爪运动速度的目的,提高生产质量。提高生产质量。提高生产质量。
技术研发人员:王俊锋 黄春雷 王哲
受保护的技术使用者:广东鼎泰机器人科技有限公司
技术研发日:2020.12.28
技术公布日:2021/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1