一种木工铣刀刃口自动定位装置的制作方法
1.本实用新型属于加工制作木工铣刀的工装辅具,具体是一种木工铣刀刃口自动定位装置。
背景技术:
2.随着现代工业的发展,木工铣刀种类越来越多。目前,木工铣刀根据其刃口的结构,主要分为刃口与刀体固为一体的整体刀、刃口与刀体分离的镶齿刀及焊接刀。整体刀适用于细小部位的加工,其重复使用率以及切削量低于镶齿刀和焊接刀;镶齿刀和焊接刀多用于大吃刀量的加工,其中,镶齿刀的刀片安装精度高,但刀体的刀片槽加工复杂,制作成本高昂,另外其刀片安装后还需要进行微调,故而在木工刀具中使用不多;而焊接刀的刀体加工方便,更换刀片后只需对刀片刃口进行修磨,即可重新投入使用,故而应用范围广,用量较大。
3.焊接刀由于刀片焊接在刀体上,为了便于刀片的焊接,刀片的形状结构不能设计的太复杂,因此焊接刀多采用柱形或者锥形直齿刀结构,这种刀具在刃磨时,多采用万能工具磨床。而现有的万能工具磨床在修磨刀具时,主要以整体的螺旋刀为主,刀具装夹采用一端夹持,一端使用顶尖顶紧,刀具刃口以刀体为基准,只加工侧刃的后刀面和端面刃,一般不需要对侧刃的前刀面进行找正;而对于焊接刀来说,受制于焊接精度的限制,焊接后几个侧刃的前刀面往往不能保持一致,因此不仅需要修磨端面刃和侧刃,往往还要修磨侧刃的前刀面,以使刀具整体关于刀体轴线对称,从而降低刀具在使用过程中的振动;此时,由于刀片的强度大于刀体强度,修磨前如果不对前刀面进行找正,则刀片的前刀面与排屑槽之间的角度就较难控制,并且刀片的修磨量也会相应的加大,会造成修磨时间的延长,另外也会降低刀片的使用寿命。
4.目前,对夹紧后的刀具进行刃口的测量找正定位只能使用百分表或者寻边器,其原理是选定刀具的一个面作为测量基准面,在基准面上测量一段距离上的变形量,然后通过三角函数计算角度偏差,再调整分度头使基准面达到需要的角度,而这个过程一般无法在一次测量找正中实现,往往需要经过多次反复的测量调整,才能达到较为理想的精度,对于操作者来说要求极高,另外,这种测量定位的方法较为繁琐,严重降低焊接刀的批量加工效率。
技术实现要素:
5.针对背景技术中存在的问题,本实用新型的目的是提供一种木工铣刀刃口自动定位装置,通过设计相应的传感器来测量刀具基面数据,然后通过plc控制的电动分度头使刀具自动旋转至需要调整的角度,以解决背景技术中提出的刀具刃口找正困难的问题,本实用新型可应用于刀具加工中的找正,其找正的效率高,并且容易实现与机床相配套的数字化控制。
6.为实现上述目的,本实用新型采用以下技术方案:
7.一种木工铣刀刃口自动定位装置,包括工作台、数控分度头、刀具夹头、y轴位移机构、测量头、测头夹和内设有plc控制器的设备盒,所述的数控分度头设置在工作台上端面右侧,其轴线平行于x轴,在数控分度头的左端设有刀具夹头;所述的y轴位移机构设置在工作台上端面左侧,测头夹通过安装座设置在y轴位移机构上,测量头穿设在测头夹内,用于测量刀具基面在y轴方向的高度差;在y轴位移机构上设有位移传感器,用于测量测量头的y向位移量;所述位移传感器的输出端、测量头的输出端分别与plc控制器的输入端电性连接,plc控制器的输出端与数控分度头的驱动器电性连接;所述的设备盒设有屏幕和键盘,用于显示plc控制器接收的数据并输入plc指令。
8.所述的测头夹整体为环形结构,其固定套设在测量头的一端,在测头夹的外部两侧分别设有耳板;所述的安装座整体为横板和竖板构成的l型直角板,横板设置在y轴位移机构上,竖板上设有用于穿设测量头的矩形通孔,所述矩形通孔的两侧分别设有腰形通孔,所述腰形通孔通过螺栓与测头夹上的耳板固连。
9.所述的y轴位移机构通过x轴位移机构设置在工作台上,所述y轴位移机构、x轴位移机构均为手动控制的直线滑台,x轴位移机构的底座与工作台固连,y轴位移机构的底座设置在x轴位移机构的滑块上,所述安装座设置在y轴位移机构的滑块上。
10.所述的测量头为采用电感式位移传感器的电气接触式三维静态测头。
11.所述y轴位移机构上的位移传感器为光栅尺。
12.上述技术方案中,传感器数据的获得、信号的模态转换、数据的传输均属于现有的公知技术,三维静态测头、plc控制数控分度头的旋转也属于公知技术,因此,对此部分内容不再予以详述。
13.本实用新型的有益效果是:本实用新型通过手动控制的位移机构实现对刀具基面的测量,具有较高的安全性和适应性,对操作者的要求相对较低,而刀具基面的角度偏差可通过获取的测量数据由plc内置的程序计算得出,并由plc控制器控制数控分度头旋转相应的角度,省略了人工计算,避免了手动操作分度头所造成的误差。
附图说明
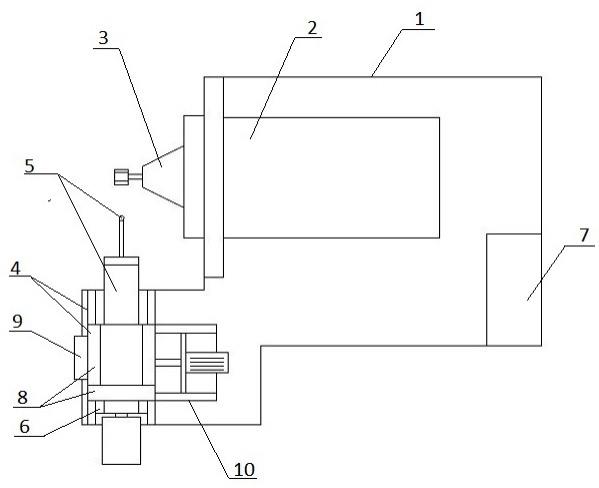
14.图1为本实用新型的整体俯视图。
15.图2为本实用新型的侧视图。
16.图3为本实用新型的前视图。
17.图中:1、工作台,2、数控分度头,3、刀具夹头,4、y轴位移机构,5、测量头,6、测头夹,601、耳板,7、设备盒,8、安装座,801、横板,802、竖板,803、矩形通孔,804、腰形通孔,9、位移传感器,10、x轴位移机构。
具体实施方式
18.下面将结合本说明书附图,对本实用新型的技术方案进行清楚、完整地描述,需要注意的是,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.如图1~图3所示,一种木工铣刀刃口自动定位装置,包括工作台1、数控分度头2、
刀具夹头3、y轴位移机构4、测量头5、测头夹6和内设有plc控制器的设备盒7,所述的数控分度头2设置在工作台1上端面右侧,其轴线平行于x轴,在数控分度头2的左端设有刀具夹头3;所述的y轴位移机构4设置在工作台1上端面左侧,测头夹6通过安装座8设置在y轴位移机构4上,测量头5穿设在测头夹6内,用于测量刀具基面在y轴方向的高度差;在y轴位移机构4上设有位移传感器9,用于测量测量头5的y向位移量;所述位移传感器9的输出端、测量头5的输出端分别与plc控制器的输入端电性连接,plc控制器的输出端与数控分度头2的驱动器电性连接;所述的设备盒7设有屏幕和键盘,用于显示plc控制器接收的数据并输入plc指令。具体的,在本实用新型的一个实施例中,所述的测量头5采用电气接触式三维静态测头,其采用电感式位移传感器,测头沿工件表面移动时,可始终保持接触状态,并不间断的获取工件表面的轮廓变化值,其可测范围约3
㎜
左右,测量精度高;所述y轴位移机构4上的位移传感器9为光栅尺。
20.所述的测头夹6整体为环形结构,其固定套设在测量头5的一端,在测头夹6的外部两侧分别设有耳板601;所述的安装座8整体为横板801和竖板802构成的l型直角板,横板801设置在y轴位移机构4上,竖板802上设有用于穿设测量头5的矩形通孔803,所述矩形通孔803的两侧分别设有腰形通孔804,所述腰形通孔804通过螺栓与测头夹6上的耳板601固连。具体的,通过调整侧头夹在安装座上的位置可调整测量头的z向高度,使测量头的高度与刀具基面相匹配。
21.所述的y轴位移机构4通过x轴位移机构10设置在工作台1上,所述y轴位移机构4、x轴位移机构10均为手动控制的直线滑台,具体的,在本实用新型的一个实施例中,手动控制的方式为数控手轮;所述的x轴位移机构10的底座与工作台1固连,y轴位移机构4的底座设置在x轴位移机构10的滑块上,所述安装座8设置在y轴位移机构4的滑块上。
22.本实用新型的使用方法:
23.将需要磨削的刀具安装在数控分度头的刀具夹头上,目测刀具的测量基面大致与机床坐标系的y轴平行;根据刀具参数,通过调整测头夹在安装座上位置的调整测头高度,然后手动操纵x轴位移机构至合适的位置,再操纵y轴位移机构使测头进行y轴方向的移动,测头贴合刀具的测量基面移动一段距离时,测出刀具测量基面在y轴方向上的高度差,并将测得的数据信息输入至plc控制器,最后退出测量头,plc控制器根据测量数据,通过内置的软件计算数控分度头的旋转方向以及旋转角度,并驱动分度头运行,使刀具的测量基面与y轴平行。
24.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
25.本实用新型未详述部分为现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1