一种毛坯轮廓自动跟随装置的制作方法
1.本实用新型涉及一种毛坯轮廓自动跟随装置。
背景技术:
2.铸件毛坯清理需要对分型面进行打磨,以去除飞边毛刺,传统打磨为人工进行打磨完成,由操作人员手持打磨装置进行加工,不仅效率低,成本高,而且危险程度高,打磨产生的粉尘对操作人员的健康也会造成损伤,由于人工智能的发展,目前小铸件毛坯(误差范围小)均采用机器人进行打磨,但是中、大铸件大多还是采用人工打磨;这是因为中、大铸件的尺寸误差范围大,且误差产生位置也各不相同,由机器人手持的打磨装置进行打磨,走的是根据预先设定的轨迹的绝对路径,这样不可避免的在壁厚处会产生碰撞,损坏打磨装置或毛坯本体,或在壁薄处出现走空的情况。
3.而如果采用目前最先进的视觉检测自动打磨装置,则需要实时对每个铸件生产不同的三维图形数据库,且需要大量的运算设备,其设备成本极高,无法大范围普及使用;另外,由于大多数铸件整体颜色一致且为深色,导致摄像头读取后构建还会出现错误的三维图形,导致打磨出现问题。
技术实现要素:
4.本实用新型的目的是克服上述缺陷,提供一种毛坯轮廓自动跟随装置。
5.本实用新型采用以下技术方案:
6.一种毛坯轮廓自动跟随装置,包括连接座,上端设有法兰端;主定位夹口,通过铰接机构连接所述连接座;电机,安装于所述铰接机构上;丝杆,一端固定连接所述电机,用于调节铰接机构以改变连接座与主定位夹口的夹角;副定位夹口,连接固定于主定位夹口,使得所述主定位夹口与副定位夹口之间形成夹持位;电容传感器,位于副定位夹口下方,通过连接架固定;所述连接架安装固定于所述连接座侧方;控制器,根据预设程序接收所述电容传感器数据,并根据此数据控制电机运行。
7.优选的,所述铰接机构为:所述连接座的后端通过后轴连接所述主定位夹口的后端;所述连接座的前端两侧各铰接有第一铰接片,所述主定位夹口的前端两侧各铰接有第二铰接片,所述第一铰接片与第二铰接片通过前轴连接;所述前轴中间设有螺纹孔;所述电机安装于所述后轴上;所述丝杆穿过后轴,与所述前轴的螺纹孔配合连接。
8.优选的,所述后轴一侧开有槽,所述电机安装于所述槽中。
9.优选的,所述连接架尾端设有用于左右调节的定片;所述定片设有上下调节移动的滑片;所述电容传感器设于所述滑片下方。
10.优选的,所述控制器为plc控制器。
11.优选的,所述电机为伺服电机。
12.优选的,所述副定位夹口,通过螺栓连接固定于主定位夹口。
13.本实用新型的有益效果为:一、采用电容传感器控制机器人持打磨装置的倾斜角,
使得打磨装置可以根据毛坯的壁厚变化实时靠近或远离毛坯进行打磨,具有补偿功能,使得使用机器人可以稳定打磨中、大型铸件;二、成本低,效果好,视觉检测及相应的处理设备几十万,而本实用新型成本低,且保证对毛坯的各点进行精确补偿后打磨,保证打磨的顺利进行。
附图说明
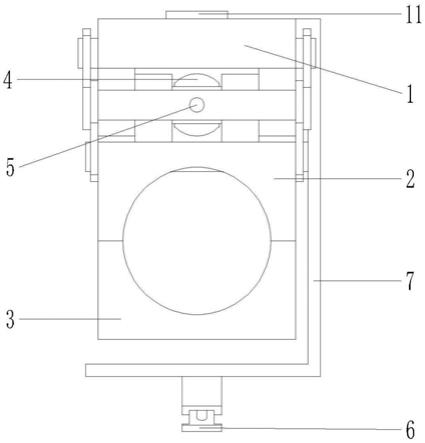
14.图1是本实用新型的正视图。
15.图2是本实用新型的侧视图。
16.图3是本实用新型的立体图。
具体实施方式
17.为了使本实用新型的目的、技术方案更加清楚,以下结合附图及实施例,对本实用新型进行进一步说明:
18.如图1~图3所示的一种毛坯轮廓自动跟随装置,包括连接座1,上端设有法兰端11,与工业机器人第六轴法兰端相连;主定位夹口2,通过铰接机构连接所述连接座1;电机4,安装于所述铰接机构上;丝杆5,一端固定连接所述电机,用于调节铰接机构以改变连接座1与主定位夹口2的夹角;副定位夹口3,连接固定于主定位夹口2,使得所述主定位夹口与副定位夹口之间形成夹持位,用于夹持电动打磨工具;电容传感器6,位于副定位夹口下方,通过连接架7固定;所述连接架7安装固定于所述连接座1的侧方;控制器,安装于电气控制柜内(图中未示出),根据预设程序接收所述电容传感器数据,并根据此数据控制电机运行,从而控制夹角角度。
19.本发明人最开始采用激光传感器,激光传感器成本大,几千元,电容传感器几十元,且激光传感器在铸件上反射效果差,在加工过程中,切削粉尘等均会对激光传感器造成影响,导致监测传输的数据错误,造成打磨出现问题,通过不断试验最终采用电容传感器。
20.优选的,所述铰接机构为:所述连接座1的后端通过后轴81连接所述主定位夹口的后端;所述连接座1的前端两侧各铰接有第一铰接片83,所述主定位夹口的前端两侧各铰接有第二铰接片84,所述第一铰接片83与第二铰接片84通过前轴82连接;所述前轴82中间设有螺纹孔;所述电机4安装于所述后轴81上;所述丝杆5穿过后轴81,与所述前轴82的螺纹孔配合连接。
21.优选的,所述后轴81一侧开有槽(图中未示出),所述电机4安装于所述槽中。
22.优选的,所述连接架尾端设有用于左右调节的定片91,可以左右调节移动20mm;所述定片设有上下调节移动的滑片92;所述电容传感器6设于所述滑片92下方。
23.优选的,所述控制器为plc控制器。
24.优选的,所述电机4为伺服电机。
25.优选的,所述副定位夹口3,通过螺栓连接固定于主定位夹口2,本实用新型采用六枚螺钉将两者固定。
26.本实用新型的工作原理为:通过主定位夹口与副定位夹口之间形成夹持位固定有打磨装置,另外,通过安装电容传感器,根据电容传感器检测出来轮廓的变化量,控制伺服电机,进而带动丝杆转动,调整连接座与主定位夹口的角度,控制打磨装置的打磨片打磨点
与连续轮廓的距离,保证打磨深度不会因为毛坯轮廓的变化而深浅不一,避免了打磨不到或者是打磨太深的问题。
27.在实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
28.在实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
29.本实用新型所采用的部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
30.以上所述,仅是本实用新型较佳实施例而已,并非对本实用新型的技术范围作任何限制,故凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,仍属于本实用新型的保护范围。
技术特征:
1.一种毛坯轮廓自动跟随装置,其特征在于,包括:连接座,上端设有法兰端;主定位夹口,通过铰接机构连接所述连接座;电机,安装于所述铰接机构上;丝杆,一端固定连接所述电机,用于调节铰接机构以改变连接座与主定位夹口的夹角;副定位夹口,连接固定于主定位夹口,使得所述主定位夹口与副定位夹口之间形成夹持位;电容传感器,位于副定位夹口下方,通过连接架固定;所述连接架安装固定于所述连接座侧方;控制器,根据预设程序接收所述电容传感器数据,并根据此数据控制电机运行。2.根据权利要求1所述的一种毛坯轮廓自动跟随装置,其特征在于:所述铰接机构为:所述连接座的后端通过后轴连接所述主定位夹口的后端;所述连接座的前端两侧各铰接有第一铰接片,所述主定位夹口的前端两侧各铰接有第二铰接片,所述第一铰接片与第二铰接片通过前轴连接;所述前轴中间设有螺纹孔;所述电机安装于所述后轴上;所述丝杆穿过后轴,与所述前轴的螺纹孔配合连接。3.根据权利要求2所述的一种毛坯轮廓自动跟随装置,其特征在于:所述后轴一侧开有槽,所述电机安装于所述槽中。4.根据权利要求1
‑
3任一所述的一种毛坯轮廓自动跟随装置,其特征在于:所述连接架尾端设有用于左右调节的定片;所述定片设有上下调节移动的滑片;所述电容传感器设于所述滑片下方。5.根据权利要求1所述的一种毛坯轮廓自动跟随装置,其特征在于:所述控制器为plc控制器。6.根据权利要求1所述的一种毛坯轮廓自动跟随装置,其特征在于:所述电机为伺服电机。7.根据权利要求1所述的一种毛坯轮廓自动跟随装置,其特征在于:所述副定位夹口,通过螺栓连接固定于主定位夹口。
技术总结
本实用新型提供一种毛坯轮廓自动跟随装置,包括连接座,上端设有法兰端,与工业机器人第六轴法兰端相连;主定位夹口,通过铰接机构连接所述连接座;电机,安装于所述铰接机构上;丝杆,一端固定连接所述电机,用于调节铰接机构以改变连接座与主定位夹口的夹角;副定位夹口,连接固定于主定位夹口,使得所述主定位夹口与副定位夹口之间形成夹持位,用于夹持电动打磨工具;电容传感器,位于副定位夹口下方,通过连接架固定;所述连接架安装于所述连接座侧方;控制器,根据预设程序接收所述电容传感器数据,并根据此数据控制电机运行,从而控制夹角角度;本新型成本低,且对毛坯的各点进行精确补偿后打磨,使得机器人可以稳定打磨中、大型铸件。型铸件。型铸件。
技术研发人员:吴占恒 肖富雄 江禧贵 赖柏材 林雨露 李峰 翁龄晔 罗智骁 罗骏椿 傅丹强 范小敏
受保护的技术使用者:欣越智机科技(龙岩)有限公司
技术研发日:2021.05.24
技术公布日:2021/11/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1