一种基于机器人控制的浮动打磨装置的制作方法
1.本实用新型涉及工件打磨技术领域,具体涉及一种基于机器人控制的浮动打磨装置。
背景技术:
2.铸造件在浇注完后,工件表面会留有较多的飞边、浇冒口,必须去除这些飞边和浇冒口,对于铸造件一般使用工锤直接敲掉,再通过打磨工把铸件上多余的飞边和浇冒口打磨干净,平整,美观。
3.目前对于工件的打磨工序自动化程度不高,通常采用人工打磨,不仅耗时长、效率低,而且一致性差、人工成本高。基于此,市面上陆续出现了能够取代人力进行自动或半自动打磨的打磨机器人,虽然能解决劳动强度大及安全问题,但目前市面上的打磨机器人大多结构复杂、自动生产线改造难度大、制造成本高。
4.因此,如何提供一种打磨效率高、打磨质量好、结构简单、制造成本低的打磨装置,成为本领域技术人员亟待解决的技术问题。
技术实现要素:
5.针对现有技术中的缺陷,本实用新型提供一种基于机器人控制的浮动打磨装置,其不仅打磨效率高、打磨质量好,而且结构简单、制造成本低。
6.为了实现上述目的,本实用新型提供一种基于机器人控制的浮动打磨装置,包括:用于与机器人驱动端固接的安装板,以及通过浮动机构安装在所述安装板上的打磨笔;
7.所述浮动机构包括:向心关节轴承和弹性胶套;
8.所述向心关节轴承贯穿嵌套于所述安装板上,所述打磨笔固定穿过所述向心关节轴承万向球的内孔,打磨笔的输出端具有打磨头;所述弹性胶套套设于所述打磨笔的外壁并与所述安装板固接。
9.优选的,所述打磨笔通过固定组件固定在所述向心关节轴承万向球上;
10.所述固定组件包括:挡块和锁紧螺母;
11.所述挡块和所述锁紧螺母固定设置于所述向心关节轴承万向球的相对两侧以将所述打磨笔固定在所述向心关节轴承万向球上。
12.优选的,所述弹性胶套包括套筒部分以及设置在套筒部分一端的盘状部分,所述盘状部分与所述安装板固定连接。
13.优选的,所述套筒部分远离所述盘状部分的一端与所述打磨笔外壁贴合,其与部分与所述打磨笔外壁具有间隙。
14.优选的,所述打磨笔为气动打磨笔
15.本实用新型具有如下有益效果:
16.上述打磨装置应用装配于机器人,用于对工件(铸造件)的不平整部分实现自动、连续、高效打磨作业。具体而言,安装板作为打磨装置的承载基体用于与机器人的驱动端固
定连接,机器人能够带动上述打磨装置自动移动打磨工件不平整表面,自动化程度高,极大节约人工成本。
17.此外,打磨笔通过浮动机构安装在安装板上,当打磨头遇见例如飞边、浇筑口等不平整表面时,弹性胶套通过自身形变伸缩,可提供打磨笔缓冲和浮动能力,使得打磨头可靠抵靠工件。并且此时向心关节轴承万向球能够朝任意方向转动,使得打磨头具备一定自适应角度调整和浮动能力,打磨头能够在移动打磨过程中,始终紧密贴合各种不平整表面,保证打磨连续性,打磨效率更高,打磨质量更好。
附图说明
18.此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
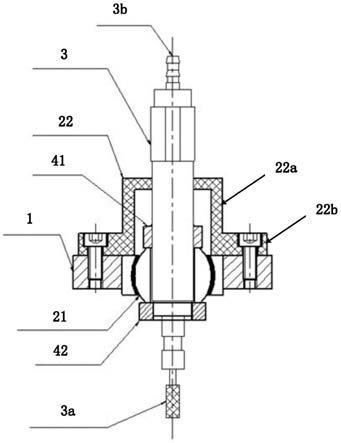
19.图1为本实用新型实施例所述的基于机器人控制的浮动打磨装置的结构示意图;
20.图2为本实用新型实施例所述的基于机器人控制的浮动打磨装置处于浮动状态的结构示意图;
21.附图标号
[0022]1‑
安装板;
[0023]
21
‑
向心关节轴承;22
‑
弹性胶套;22a
‑
套筒部分;22b盘状部分;
[0024]3‑
打磨笔;3a
‑
打磨头;3b
‑
接气端;
[0025]
41
‑
挡块;42
‑
螺母。
具体实施方式
[0026]
为了使本申请实施例中的技术方案及优点更加清楚明白,以下结合附图对本申请的示例进行进一步详细的说明,显然,所描述的实施例仅是本申请的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
[0027]
请参阅图1和图2,图1为本实用新型实施例所述的基于机器人控制的浮动打磨装置的结构示意图;图2为本实用新型实施例所述的基于机器人控制的浮动打磨装置处于浮动状态的示意图。
[0028]
一种基于机器人控制的浮动打磨装置,包括:用于与机器人驱动端固接的安装板1,以及通过浮动机构安装在安装板1上的打磨笔3。
[0029]
其中,浮动机构包括:向心关节轴承21和弹性胶套22。向心关节轴承21贯穿嵌套于安装板1上,打磨笔3固定穿过向心关节轴承万向球的内孔,打磨笔3的输出端具有打磨头3a。弹性胶套22套设于打磨笔3的外壁并与安装板1固定连接。打磨笔3可以采用气动打磨笔,其接气端3b接压缩空气用于驱动打磨头3a动作。
[0030]
打磨笔3通过固定组件固定在所述向心关节轴承的万向球上。固定组件包括:挡块41和锁紧螺母42。挡块41和锁紧螺母42固定设置于向心关节轴承21的万向球的相对两侧以将打磨笔3固定在向心关节轴承21的万向球上。
[0031]
弹性胶套22包括套筒部分22a以及设置在套筒部分一端的盘状部分22b,盘状部分22b与安装板1固定连接。套筒部分远离盘状部分的一端与打磨笔3外壁贴合,其与部分则与
打磨笔3外壁具有间隙。
[0032]
通过上述实施例可知,上述打磨装置应用装配于机器人,用于对工件(铸造件)的不平整部分实现自动、连续、高效打磨作业。具体而言,安装板1作为打磨装置的承载基体用于与机器人的驱动端固定连接,机器人能够带动上述打磨装置移动自动打磨工件不平整表面,自动化程度高,极大节约人工成本。此外,打磨笔3通过浮动机构安装在安装板1上,当打磨头3a遇见飞边、浇筑口等不平整表面时,弹性胶套22a通过自身形变伸缩,可提供打磨笔缓冲和浮动能力,使得打磨头3a可靠抵靠工件。并且此时向心关节轴承21的万向球能够朝任意方向转动,使得打磨头3a具备一定自适应角度调整和浮动能力,打磨头3a能够在移动打磨过程中,始终紧密贴合各种不平整表面,保证打磨连续性,打磨效率更高,打磨质量更好。
[0033]
如图2所示,上述打磨装置在移动打磨过程中,当打磨头3a遇见工件凸出部位时,打磨头3a受到向外的作用力,打磨笔3能够跟随向心关节轴承21的万向球任意转动,从而使得打磨头3a具备一定自适应角度调整和浮动能力;当打磨头3a遇见工件平整部位时,工件对打磨头的向外作用力消失,弹性胶套22对打磨笔3施加使其恢复到初始状态(竖直方向)的复位弹力。
[0034]
显然,本领域的技术人员可对本申请进行各种改动和变型而不脱离本申请的精神和范围。这样,倘若本申请的这些修改和变型属于本申请权利要求及其等同技术的范围之内,则本申请也意图包含这些改动和变型在内。
技术特征:
1.一种基于机器人控制的浮动打磨装置,其特征在于,包括:用于与机器人驱动端固接的安装板,以及通过浮动机构安装在所述安装板上的打磨笔;所述浮动机构包括:向心关节轴承和弹性胶套;所述向心关节轴承贯穿嵌套于所述安装板上,所述打磨笔固定穿过所述向心关节轴承万向球的内孔,打磨笔的输出端具有打磨头;所述弹性胶套套设于所述打磨笔的外壁并与所述安装板固接。2.根据权利要求1所述的基于机器人控制的浮动打磨装置,其特征在于,所述打磨笔通过固定组件固定在所述向心关节轴承万向球上;所述固定组件包括:挡块和锁紧螺母;所述挡块和所述锁紧螺母固定设置于所述向心关节轴承万向球的相对两侧以将所述打磨笔固定在所述向心关节轴承万向球上。3.根据权利要求1或2所述的基于机器人控制的浮动打磨装置,其特征在于,所述弹性胶套包括套筒部分以及设置在套筒部分一端的盘状部分,所述盘状部分与所述安装板固定连接。4.根据权利要求3所述的基于机器人控制的浮动打磨装置,其特征在于,所述套筒部分远离所述盘状部分的一端与所述打磨笔外壁贴合,其与部分与所述打磨笔外壁具有间隙。5.根据权利要求1所述的基于机器人控制的浮动打磨装置,其特征在于,所述打磨笔为气动打磨笔。
技术总结
本实用新型提供了一种基于机器人控制的浮动打磨装置,包括:用于与机器人驱动端固接的安装板,以及通过浮动机构安装在所述安装板上的打磨笔;所述浮动机构包括:向心关节轴承和弹性胶套;所述向心关节轴承贯穿嵌套于所述安装板上,所述打磨笔固定穿过所述向心关节轴承万向球的内孔,打磨笔的输出端具有打磨头;所述弹性胶套套设于所述打磨笔的外壁并与所述安装板固接。本实用新型结构简单、制造成本低、打磨效率高、打磨质量好。打磨质量好。打磨质量好。
技术研发人员:何金钟 张伟 张欣
受保护的技术使用者:重庆市旺成科技股份有限公司
技术研发日:2021.07.29
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1