一种磁吸式滚子超精机的制作方法
本技术涉及超精机,尤其是一种磁吸式滚子超精机。
背景技术:
1、现有技术中,对于滚子超精机在加工过程中,一般都是利用两端夹持,实现滚子转动,在利用震动机构在滚子的周向表面进行超精处理。但是在实际加工过程中,有滚子需要对其端面进行超精,则需要进行再次装夹,并配备端面超精的工装夹具,装夹过程中容易造成滚子周向表面受损等,影响加工品质。
技术实现思路
1、本实用新型为了解决上述技术不足而提供一种磁吸式滚子超精机,能实现一次装夹对滚子的周向表面及其中一个轴向端面进行超精加工,提升效率。
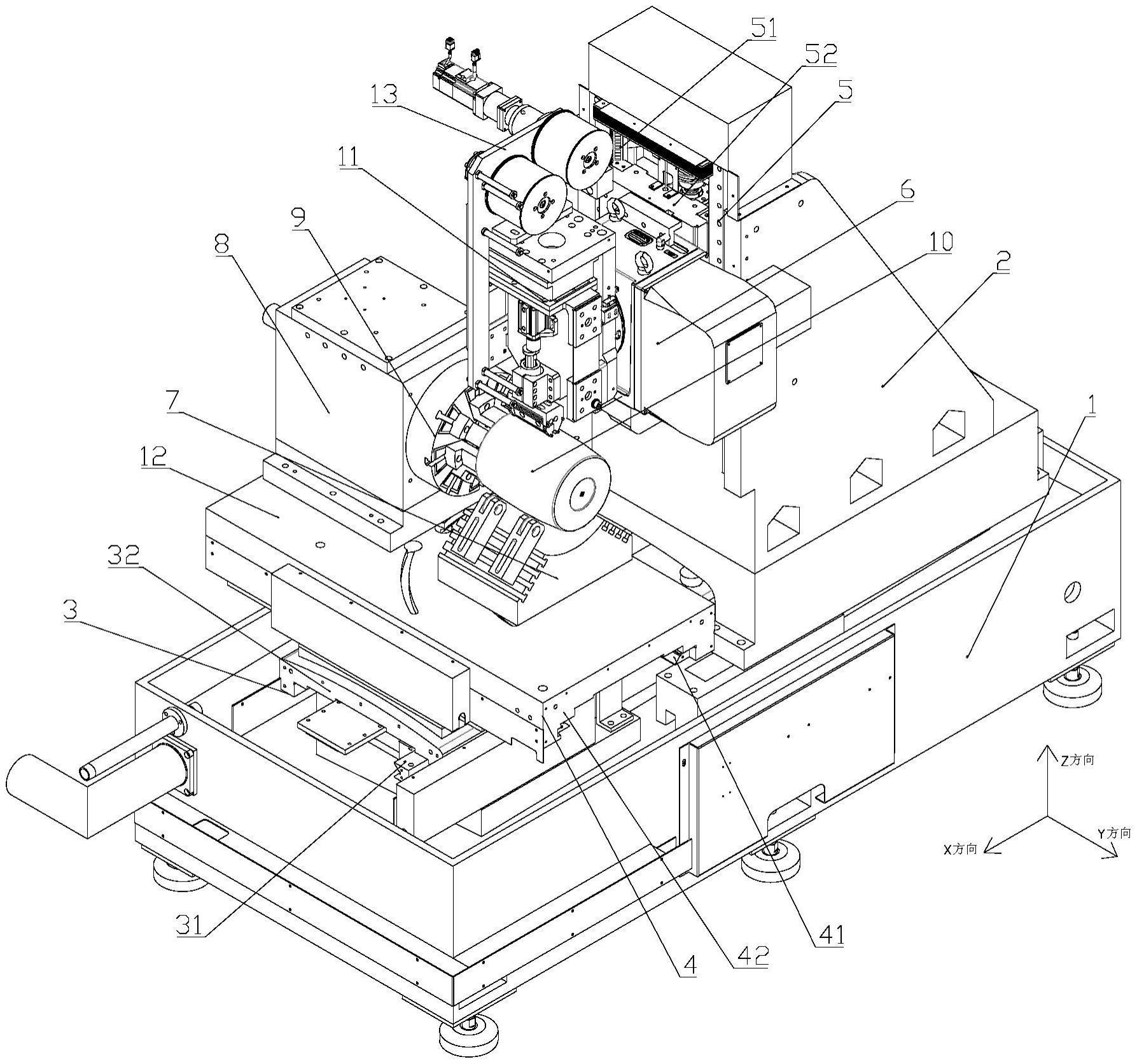
2、本实用新型公开了一种磁吸式滚子超精机,包括底座及设置在底座一侧的边座,在底座上设置有安装板,安装板与底座之间设置有x向位移机构和y向位移机构,x方向与y方向垂直,x向位移机构与y向位移机构层叠设置,x向位移机构和x向位移机构带动安装板沿x方向和y方向移动,在安装板上设置有第一动力机构,在第一动力机构的输出轴上设置有电磁吸盘,所述第一动力机构带动电磁吸盘转动,所述电磁吸盘用于固定滚子,电磁吸盘所固定的滚子下方的安装板上设置有支撑托,所述支撑托用于托住滚子,在边座上设置有z向位移机构,z方向垂直于x方向与y方向所形成的平面,在z向位移机构上设置有旋转工作台,所述旋转工作台的旋转轴的轴向垂直于电子吸盘上固定的滚子的轴向与z方向所形成的平面,在旋转工作台上的旋转轴上固定有安装架,在安装架上设置有振动机构。
3、上述技术方案,底座上设置有x向位移机构和y向位移机构,两者配合后能实现安装板上的第一动力机构、电磁吸盘及被吸附固定的滚子均可以在x方向、y方向进行任意位置的调节,同时配合边座上的z向位移机构,能调节安装架上的振动机构进行z方向的调节。其中振动机构位于滚子上方,对滚子周向表面进行超精加工,且可以将其周向表面的各个位置均可以加工。所述振动机构可以为现有技术中如:中国实用新型专利:cn202020929719.4,一种超精机的振动机构中所公开的技术方案,当然也可以为更为传统的用于超精机的振动机构,在此不作限定。在对滚子周向表面进行超精加工过程中,可以通过支撑托进行支撑,可以避免振动机构在滚子周向表面超精加工过程中因对滚子产生压力而造成滚子在电磁吸盘上的位置发生改变,最终避免造成加工偏心的情况。所以可以提升加工的稳定性。另外,在对周向表面加工完成后,可以通过旋转工作台将安装架及振动机构进行旋转,同时通过z向位移机构调整振动机构的位置,以使得振动机构对准滚子的端部,并在x向位移机构和y向位移机构的作用下,并配合z向位移机构的作用,实现振动机构对滚子的轴向端面进行超精加工。所以能实现一次装夹对滚子的周向表面及其中一个轴向端面进行超精加工,以确保超精的精度及加工效率。
4、所述x向位移机构包括x向滑轨及设置在x向滑轨上的第一滑块,第一滑块与x向滑轨之间设置有伺服电机和丝杆螺母机构,用于带动第一滑块在x向滑轨上移动,所述y向位移机构设置在第一滑块上。其中丝杆螺母机构中的螺母与第一滑块连接,所述丝杆与x向滑轨平行设置,并穿过螺母配合连接,伺服电机与丝杆传动连接,丝杆与底座或者x向滑轨之间转动连接,所以伺服电机带动丝杆转动时,能促使螺母带着第一滑块在x向滑轨上移动。
5、所述y向位移机构包括y向滑轨及设置在y向滑轨上的第二滑块,第二滑块与y向滑轨之间设置有伺服电机和丝杆螺母机构,用于带动第二滑块在y向滑轨上移动,所述安装板设置在第二滑块上。其中丝杆螺母机构中的螺母与第二滑块连接,所述丝杆与y向滑轨平行设置,并穿过螺母配合连接,伺服电机与丝杆传动连接,丝杆与第一滑块或者y向滑轨之间转动连接,所以伺服电机带动丝杆转动时,能促使螺母带着第二滑块在y向滑轨上移动。
6、所述z向位移机构包括z向滑轨及设置在z向滑轨上的第三滑块,第三滑块与z向滑轨之间设置有伺服电机和丝杆螺母机构,用于带动第三滑块在z向滑轨上移动,所述旋转工作台固定在第三滑块上。其中丝杆螺母机构中的螺母与第三滑块连接,所述丝杆与z向滑轨平行设置,并穿过螺母配合连接,伺服电机与丝杆传动连接,丝杆与边座或者z向滑轨之间转动连接,所以伺服电机带动丝杆转动时,能促使螺母带着第三滑块在z向滑轨上移动。
7、上述x向位移机构、y向位移机构及z向位移机构均通过伺服电机及丝杆螺母机构进行带动,可以精确控制位移。
8、所述支撑托包括固定座及设置在固定座上的支撑臂,电磁吸盘上的滚子轴向两侧所对应的固定座上倾斜设置支撑臂,支撑臂的数量至少为三个,支撑臂上设置有长孔,在长孔内穿设螺栓与固定座固定连接,在支撑臂的顶部设置有滑轮,所述滑轮的轴向与所述滚子的轴向平行,所述滑轮位于滚子下方并顶住滚子的轴向表面。所述支撑托包括固定座和支撑臂,固定座位于电磁吸盘固定的滚子的正下方,且其轴向两侧的侧壁倾斜设置,所以支撑臂也倾斜设置,支撑臂上的长孔内通过螺栓与固定座固定连接,可以调节支撑壁的高度,实现对不同直径的滚子的支撑,调节也简单方便。另外支撑臂的数量至少为三个,其中一侧至少两个,另一侧至少一个,而滑轮用于支撑在滚子上,确保与滚子接触,滚子转动时滑轮跟着转动,减少对滚子的磨损,以确保加工精度。
9、在设置有支撑臂的固定座侧壁上设置有若干条t型槽,所述t型槽沿滚子的轴向设置,所述支撑臂的长孔内的螺栓固定在t型槽内。其结构能随意调节支撑臂在滚子轴向的位置,以适应对不同长度的滚子加工过程中的支撑。
10、所述电磁吸盘包括连接座和活动块,所述连接座与第一动力机构的输出轴固定连接,在连接座上沿第一动力机构的输出轴的半径方向间隔均匀设置有若干条滑槽,所述活动块连接在滑槽内,并通过螺栓锁紧在滑槽内,所述活动块的端面凸出于连接座,活动块的端面用于吸附滚子的端面。该结构的设计,能根据实际的滚子的直径合理调节连接座上的活动块所围成的圆形结构的直径,该直径应等于或略小于滚子直径。电磁吸盘的连接座内部设置电磁装置,通电后能产生磁性,将滚子的轴向端面吸附在连接座上的活动块上。调节后的活动块所形成的圆形结构的直径小于滚子直接,所以其超精加工至滚子端部时不会与活动块发生干涉,超精加工更加全面可靠。
11、本实用新型所得到的一种磁吸式滚子超精机,利用电磁吸盘及支撑托的配合实现对滚子的装夹,同时通过x向位移机构、y向位移机构、z向位移机构的配合,能实现对滚子的周向端面及其中一个轴向端面进行超精加工,加工效率高,精度高。
技术特征:
1.一种磁吸式滚子超精机,其特征是:包括底座及设置在底座一侧的边座,在底座上设置有安装板,安装板与底座之间设置有x向位移机构和y向位移机构,x方向与y方向垂直,x向位移机构与y向位移机构层叠设置,x向位移机构和x向位移机构带动安装板沿x方向和y方向移动,在安装板上设置有第一动力机构,在第一动力机构的输出轴上设置有电磁吸盘,所述第一动力机构带动电磁吸盘转动,所述电磁吸盘用于固定滚子,电磁吸盘所固定的滚子下方的安装板上设置有支撑托,所述支撑托用于托住滚子,在边座上设置有z向位移机构,z方向垂直于x方向与y方向所形成的平面,在z向位移机构上设置有旋转工作台,所述旋转工作台的旋转轴的轴向垂直于电子吸盘上固定的滚子的轴向与z方向所形成的平面,在旋转工作台上的旋转轴上固定有安装架,在安装架上设置有振动机构。
2.根据权利要求1所述的一种磁吸式滚子超精机,其特征是:所述x向位移机构包括x向滑轨及设置在x向滑轨上的第一滑块,第一滑块与x向滑轨之间设置有伺服电机和丝杆螺母机构,用于带动第一滑块在x向滑轨上移动,所述y向位移机构设置在第一滑块上。
3.根据权利要求2所述的一种磁吸式滚子超精机,其特征是:所述y向位移机构包括y向滑轨及设置在y向滑轨上的第二滑块,第二滑块与y向滑轨之间设置有伺服电机和丝杆螺母机构,用于带动第二滑块在y向滑轨上移动,所述安装板设置在第二滑块上。
4.根据权利要求3所述的一种磁吸式滚子超精机,其特征是:所述z向位移机构包括z向滑轨及设置在z向滑轨上的第三滑块,第三滑块与z向滑轨之间设置有伺服电机和丝杆螺母机构,用于带动第三滑块在z向滑轨上移动,所述旋转工作台固定在第三滑块上。
5.根据权利要求4所述的一种磁吸式滚子超精机,其特征是:所述支撑托包括固定座及设置在固定座上的支撑臂,电磁吸盘上的滚子轴向两侧所对应的固定座上倾斜设置支撑臂,支撑臂的数量至少为三个,支撑臂上设置有长孔,在长孔内穿设螺栓与固定座固定连接,在支撑臂的顶部设置有滑轮,所述滑轮的轴向与所述滚子的轴向平行,所述滑轮位于滚子下方并顶住滚子的轴向表面。
6.根据权利要求5所述的一种磁吸式滚子超精机,其特征是:在设置有支撑臂的固定座侧壁上设置有若干条t型槽,所述t型槽沿滚子的轴向设置,所述支撑臂的长孔内的螺栓固定在t型槽内。
7.根据权利要求1所述的一种磁吸式滚子超精机,其特征是:所述电磁吸盘包括连接座和活动块,所述连接座与第一动力机构的输出轴固定连接,在连接座上沿第一动力机构的输出轴的半径方向间隔均匀设置有若干条滑槽,所述活动块连接在滑槽内,并通过螺栓锁紧在滑槽内,所述活动块的端面凸出于连接座,活动块的端面用于吸附滚子的端面。
技术总结
本技术涉及超精机技术领域,尤其是一种磁吸式滚子超精机,包括底座及设置在底座一侧的边座,在底座上设置有安装板,安装板与底座之间设置有X向位移机构和Y向位移机构,在安装板上设置有第一动力机构,在第一动力机构的输出轴上设置有电磁吸盘,所述电磁吸盘用于固定滚子,电磁吸盘所固定的滚子下方的安装板上设置有支撑托,在边座上设置有Z向位移机构,在Z向位移机构上设置有旋转工作台,在旋转工作台上的旋转轴上固定有安装架,在安装架上设置有振动机构。本技术所得到的一种磁吸式滚子超精机,利用电磁吸盘及支撑托的配合实现对滚子的装夹,能实现对滚子的周向端面及其中一个轴向端面进行超精加工,加工效率高,精度高。
技术研发人员:朱江良
受保护的技术使用者:浙江晟禧精密机械科技有限公司
技术研发日:20211203
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!