一种用于更换长水口的智能机械臂的制作方法
本技术涉及铸造加工,尤其涉及一种用于更换长水口的智能机械臂。
背景技术:
1、转炉生产出来的钢水经过精炼炉精炼以后,需要将钢水铸造成不同类型、不同规格的钢坯。连铸工段就是将精炼后的钢水连续铸造成钢坯的生产工序,主要设备包括回转台、中间包,结晶器、拉矫机等
2、将装有精炼好钢水的钢包运至回转台,回转台转动到浇注位置后,将钢水注入中间包,中间包再由水口将钢水分配到各个结晶器中去。结晶器是连铸机的核心设备之一,它使铸件成形并迅速凝固结晶。拉矫机与结晶振动装置共同作用,将结晶器内的铸件拉出,经冷却、电磁搅拌后,切割成一定长度的板坯;当钢水由钢包向中间包浇注时,为了避免氧化和飞溅,在钢包底部的滑动水口的下端安装长水口,一端与下水口相连,另一端插入中间包的钢水内进行密封保护浇注,但在实际加工中,由于钢水温度较高以及氧化的原因,导致长水口以及安装长水口的工装容易损坏,需要定期更换,在高温环境中,更换难度较大。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于更换长水口的智能机械臂。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种用于更换长水口的智能机械臂,包括水平旋转运动组件一、水平旋转运动组件二、俯仰摆动运动组件、回转运动组件、伸缩直线运动组件、端拾组件以及控制上述组件的电气伺服控制系统,所述水平旋转运动组件一:执行系统指令,在安装平面自由转动;
4、水平旋转运动组件二:安装在水平旋转运动组件一的输出端,水平旋转运动组件二输出端相对水平旋转运动组件一进行转动;
5、俯仰摆动运动组件:安装在水平旋转运动组件二的输出端,俯仰摆动运动组件的输出端与水平旋转运动组件二夹角大小可调;
6、回转运动组件:安装在俯仰摆动运动组件的输出端,回转运动组件绕其中轴线执行转动;
7、伸缩直线运动组件:安装在回转运动组件的输出端,伸缩直线运动组件沿其中轴线执行往复移动;
8、端拾组件:安装在伸缩直线运动组件的输出端,用于夹持固定长水口。
9、优选地,所述水平旋转运动组件一包括框架组件一以及安装在框架组件一上的旋转组件一、传动组件一和驱动组件一,驱动组件一通过传动组件一驱动旋转组件一实现水平旋转运动,旋转组件一与水平旋转运动组件二相连。
10、优选地,所述水平旋转运动组件二包括与旋转组件一相连的框架组件二,框架组件二上分别设置旋转组件二、传动组件二和驱动组件二,驱动组件二通过传动组件二驱动旋转组件二实现水平旋转运动,旋转组件二与俯仰摆动运动组件相连。
11、优选地,所述俯仰摆动运动组件包括与旋转组件二相连的框架组件三,框架组件三上分别设置旋转组件三、传动组件三和驱动组件三,驱动组件三通过传动组件三驱动旋转组件三在竖直面内转动,旋转组件三与回转运动组件相连。
12、优选地,所述回转运动组件包括与旋转组件三相连的框架组件四,框架组件四上分别安装有旋转组件四、传动组件四和驱动组件四,驱动组件四通过传动组件四驱动旋转组件四绕其中轴线旋转,旋转组件四与伸缩直线运动组件相连。
13、优选地,所述伸缩直线运动组件包括与旋转组件四相连的框架组件五,框架组件五上分别安装有导向组件、动力组件、传动组件五和驱动组件五,导向组件内滑动连接有移动组件,驱动组件五通过传动组件五驱动动力组件工作,动力组件驱动移动组件沿其轴线方向直线移动,移动组件端部连接端拾组件。
14、优选地,所述端拾组件包括快换机构和设于其上的氩气对接装置,快换机构通过快换插销与移动组件实现固定相连,快换机构的端部安装有用于固定长水口的定位装置,氩气对接装置与长水口进气口快速对接连通。
15、优选地,所述旋转组件一、旋转组件二、旋转组件三以及旋转组件四包括但不限于齿轮啮合传动、同步带轮传动、多楔带传动,所述动力组件包括但不限于丝杠传动、带传动或者齿轮齿条传动。
16、优选地,所述导向组件采用滚珠衬套导向组件、导向轮与导向轴组成的导向轮组形式的导向组件或者直线导轨导向组件。
17、优选地,所述旋转组件一、旋转组件二、旋转组件三、旋转组件四和移动组件上均设有零点位和位移传感器。
18、与现有技术相比,本实用新型的有益效果是:本实用新型结构简单,水平旋转运动组件一和水平旋转运动组件二驱动端拾组件在安装平面内转动,俯仰摆动运动组件驱动端拾组件在竖直面内上下摆动,回转运动组件驱动端拾组件绕其轴向转动,伸缩直线运动组件驱动端拾组件沿其中轴线执行直线往复移动,通过上述组件间的相互配合,实现端拾组件带动长水口实现多自由度移动,将长水口快速与钢水包的下水口对接。
技术特征:
1.一种用于更换长水口的智能机械臂,包括水平旋转运动组件一(100)、水平旋转运动组件二(200)、俯仰摆动运动组件(300)、回转运动组件(400)、伸缩直线运动组件(500)、端拾组件(600)以及控制上述组件的电气伺服控制系统,其特征在于,所述水平旋转运动组件一(100):执行系统指令,在安装平面自由转动;
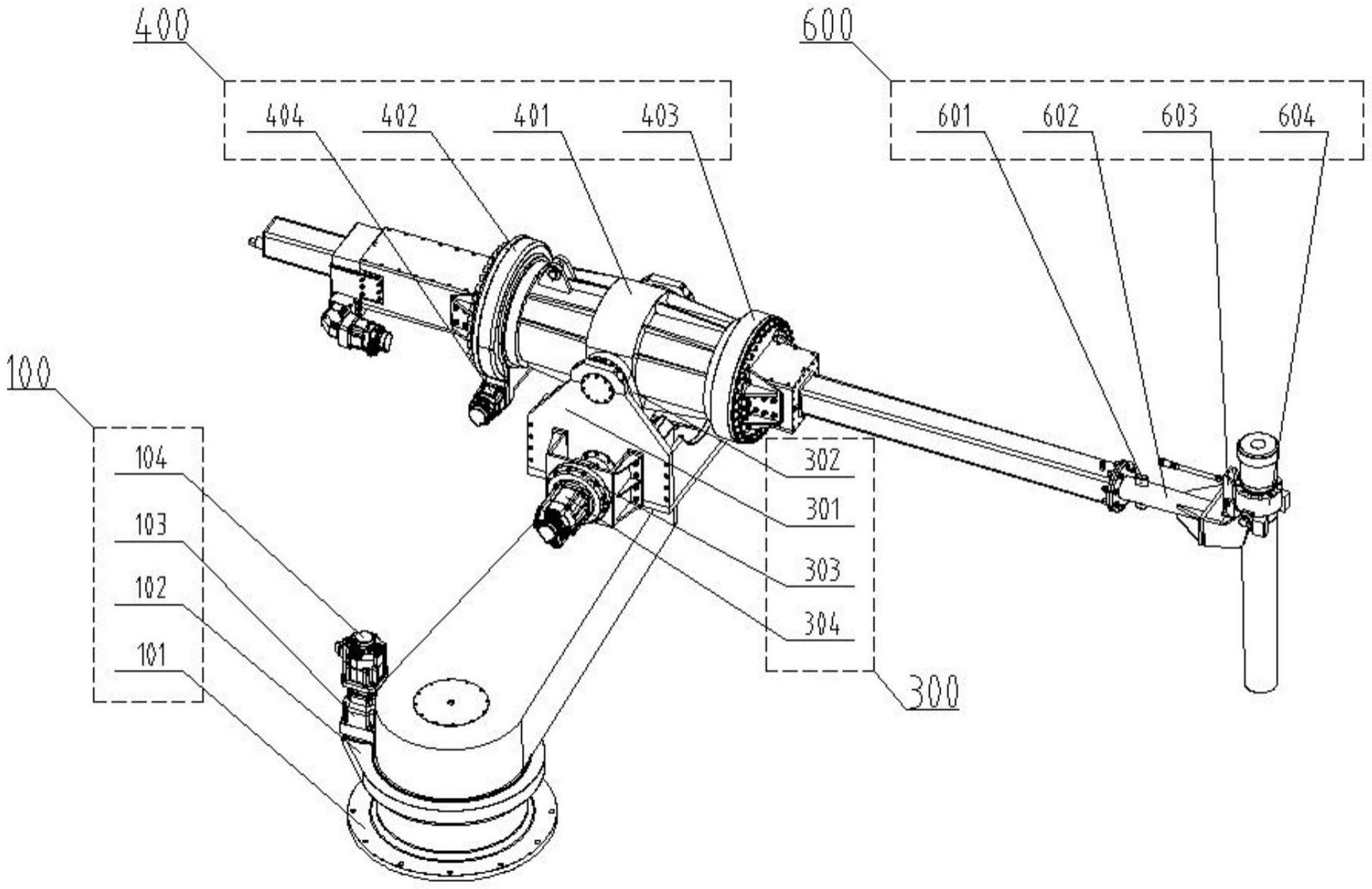
2.根据权利要求1所述的一种用于更换长水口的智能机械臂,其特征在于,所述水平旋转运动组件一(100)包括框架组件一(101)以及安装在框架组件一(101)上的旋转组件一(102)、传动组件一(103)和驱动组件一(104),驱动组件一(104)通过传动组件一(103)驱动旋转组件一(102)实现水平旋转运动,旋转组件一(102)与水平旋转运动组件二(200)相连。
3.根据权利要求2所述的一种用于更换长水口的智能机械臂,其特征在于,所述水平旋转运动组件二(200)包括与旋转组件一(102)相连的框架组件二(201),框架组件二(201)上分别设置旋转组件二(202)、传动组件二(203)和驱动组件二(204),驱动组件二(204)通过传动组件二(203)驱动旋转组件二(202)实现水平旋转运动,旋转组件二(202)与俯仰摆动运动组件(300)相连。
4.根据权利要求3所述的一种用于更换长水口的智能机械臂,其特征在于,所述俯仰摆动运动组件(300)包括与旋转组件二(202)相连的框架组件三(301),框架组件三(301)上分别设置旋转组件三(302)、传动组件三(303)和驱动组件三(304),驱动组件三(304)通过传动组件三(303)驱动旋转组件三(302)在竖直面内转动,旋转组件三(302)与回转运动组件(400)相连。
5.根据权利要求4所述的一种用于更换长水口的智能机械臂,其特征在于,所述回转运动组件(400)包括与旋转组件三(302)相连的框架组件四(401),框架组件四(401)上分别安装有旋转组件四(402)、传动组件四(403)和驱动组件四(404),驱动组件四(404)通过传动组件四(403)驱动旋转组件四(402)绕其中轴线旋转,旋转组件四(402)与伸缩直线运动组件(500)相连。
6.根据权利要求5所述的一种用于更换长水口的智能机械臂,其特征在于,所述伸缩直线运动组件(500)包括与旋转组件四(402)相连的框架组件五(501),框架组件五(501)上分别安装有导向组件(502)、动力组件(504)、传动组件五(505)和驱动组件五(506),导向组件(502)内滑动连接有移动组件(503),驱动组件五(506)通过传动组件五(505)驱动动力组件(504)工作,动力组件(504)驱动移动组件(503)沿其轴线方向直线移动,移动组件(503)端部连接端拾组件(600)。
7.根据权利要求6所述的一种用于更换长水口的智能机械臂,其特征在于,所述端拾组件(600)包括快换机构(602)和设于其上的氩气对接装置(603),快换机构(602)通过快换插销(601)与移动组件(503)实现固定相连,快换机构(602)的端部安装有用于固定长水口的定位装置(604),氩气对接装置(603)与长水口进气口快速对接连通。
8.根据权利要求7所述的一种用于更换长水口的智能机械臂,其特征在于,所述旋转组件一(102)、旋转组件二(202)、旋转组件三(302)以及旋转组件四(402)包括但不限于齿轮啮合传动、同步带轮传动、多楔带传动,所述动力组件(504)包括但不限于丝杠传动、带传动或者齿轮齿条传动。
9.根据权利要求8所述的一种用于更换长水口的智能机械臂,其特征在于,所述导向组件(502)采用滚珠衬套导向组件、导向轮与导向轴组成的导向轮组形式的导向组件或者直线导轨导向组件。
10.根据权利要求9所述的一种用于更换长水口的智能机械臂,其特征在于,所述旋转组件一(102)、旋转组件二(202)、旋转组件三(302)、旋转组件四(402)和移动组件(503)上均设有零点位和位移传感器。
技术总结
本技术公开了一种用于更换长水口的智能机械臂,包括水平旋转运动组件一、水平旋转运动组件二、俯仰摆动运动组件、回转运动组件、伸缩直线运动组件、端拾组件以及控制上述组件的电气伺服控制系统,所述水平旋转运动组件一:执行系统指令,在安装平面自由转动。本技术通过水平旋转运动组件一和水平旋转运动组件二驱动端拾组件在安装平面内转动,俯仰摆动运动组件驱动端拾组件在竖直面内上下摆动,回转运动组件驱动端拾组件绕其轴向转动,伸缩直线运动组件驱动端拾组件沿其中轴线执行直线往复移动,通过上述组件间的相互配合,实现端拾组件带动长水口实现多自由度移动,将长水口快速与钢水包的下水口对接。
技术研发人员:文学锋,王雷,马锐,陈宝强,贾峻权,吴忠源,岳鑫,崔尹杰
受保护的技术使用者:苏州博实慧源智能科技有限责任公司
技术研发日:20221101
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!