一种座椅腿装夹装置的制作方法
本技术涉及座椅腿夹具,尤其是一种座椅腿装夹装置。
背景技术:
1、现有的夹具使用座椅腿打磨过程中,对座椅腿的周向定位以及当来料夹紧孔出偏差时,会出现定位不准及无法定位的问题,本实用新型提出一种一种座椅腿装夹装置,用以解决上述问题。
2、在中国专利文献上公开的“一种机器人用的椅脚抓取装置”,其公开号为cn207415134u,包括与机器人适配安装椅脚抓取夹具部件,椅脚抓取夹具部件包括夹紧固定组件、夹紧驱动缸、中孔膨胀定位组与边脚孔固定组件,夹紧固定组件适配安装于机器人的摆臂上,边脚孔固定组件、夹紧驱动缸、中孔膨胀定位组分别安装于夹紧固定组件的上部、中部与尾部;但是公开号为cn207415134u的中国专利的结构与本实用新型存在差异,其直接利用伸缩杆带动中孔膨胀定位组,对零部件的损坏较大,且不容易复位。
技术实现思路
1、本实用新型解决了现有的座椅腿装夹装置定位不准甚至无法定位的问题,提出一种座椅腿装夹装置,设置夹具本体用以对座椅腿工件进行装夹,设置回转连接件保证座椅腿工件的周向固定,采用了滑动涨紧的方式对座椅腿工件进行准确的装夹,保证对座椅腿工件的准确定位,实现快速装夹。
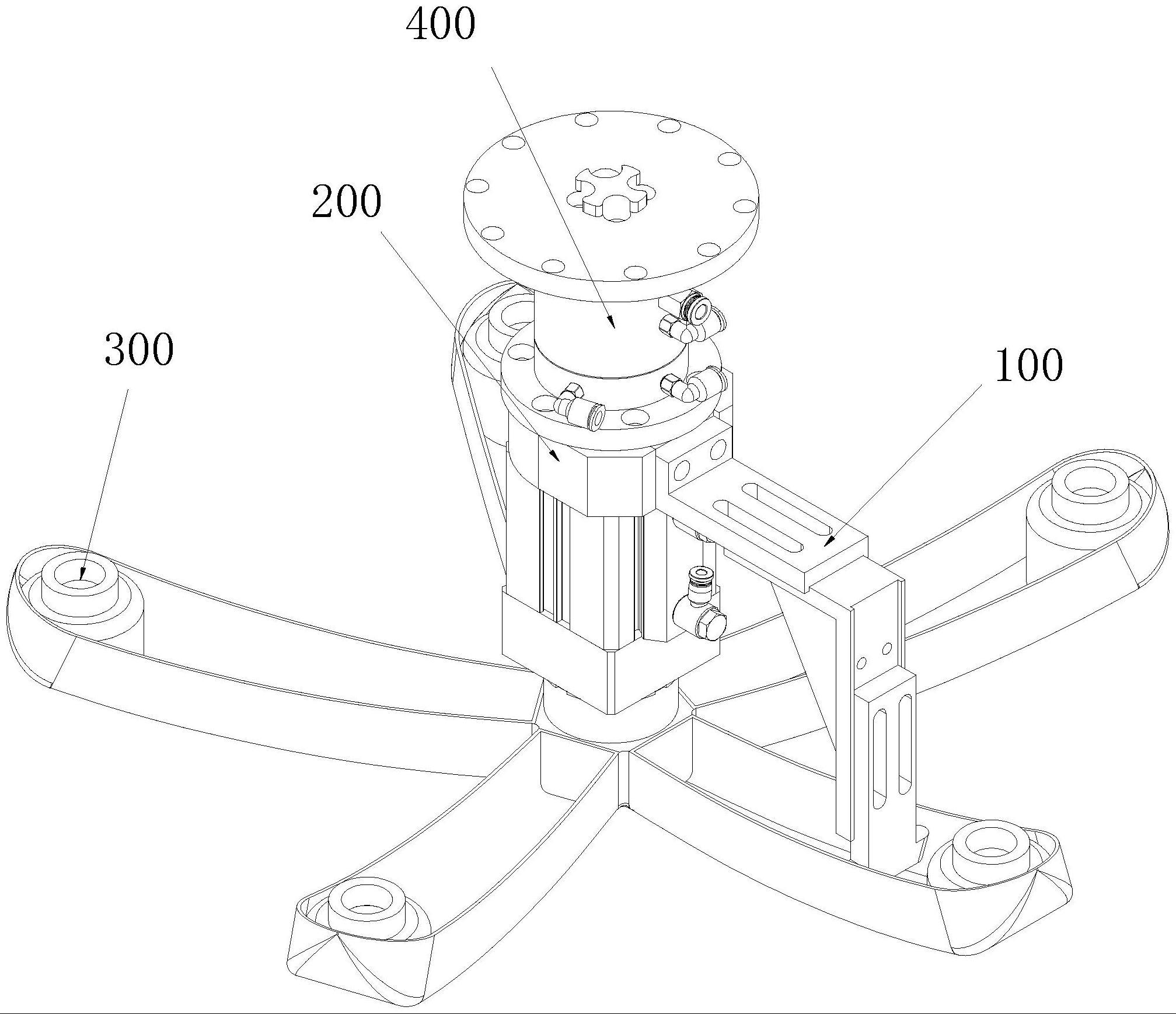
2、为了实现上述目的,本实用新型采用以下技术方案:一种座椅腿装夹装置,包括回转机构,所述回转机构的一侧可拆卸连接有用于装夹座椅腿工件的夹具本体,所述夹具本体固定连接有用于座椅腿工件周向固定的回转连接件;所述夹具本体包括驱动部和由驱动部带动的滑动夹紧部,所述滑动夹紧部包括滑动推块和与滑动推块滑动连接的涨紧部,所述涨紧部包括滑槽块和周向布置在滑槽块上的若干个涨紧块,滑槽块的一侧设置有端盖。
3、本实用新型中,在回转机构的下方设置有夹具本体,夹具本体包括上方的驱动部以及下方的滑动夹紧部,在滑动夹紧部内,设置有滑动推块以及涨紧部,涨紧部中有保持固定的滑槽块,滑槽块的周向方向上设置有若干个缺口,若干个涨紧块分别设置在缺口上,涨紧块只能进行径向的滑动,在驱动部的驱动下,使滑动夹紧部中的涨紧块沿着远离驱动部的方向滑动,从而使涨紧块沿径向扩展,使夹具本体与装夹座椅腿工件夹紧固定,保证准确装夹。
4、作为优选,所述滑动推块与若干个涨紧块滑动连接,所述滑块推块沿夹具本体轴向滑动时,若干个涨紧块沿所述滑槽块径向移动。
5、本实用新型中,滑动推块贯穿于滑槽块内,设置的多个涨紧块均与滑动推块滑动连接,在设置端盖的情况下,涨紧块能够进行沿滑槽块径向的移动,同时涨紧过程中滑动推块能够沿着滑轨滑动退回,且能够保证滑动退回时的稳定性。
6、作为优选,所述回转机构包括固定芯柱和设置在固定芯柱下方的第二连接法兰,所述固定芯柱的外侧设置有旋转套,所述旋转套上设置有若干个上气管接头,所述上气管接头通过内部连接孔连通有设置在第二连接法兰上的下气管接头。
7、本实用新型中,设置的第二连接法兰与夹具本体进行连接;在旋转套上设置有多个上气管接头,其内的通气孔与第二连接法兰通过内部连接孔连通以及密封圈密封,每个上气管接头与每个下气管接头一一对应,并且贯孔导通,能够防止气管缠绕导致的干涉问题。
8、作为优选,所述驱动部包括与回转机构连接的第一连接块,所述第一连接块远离所述回转机构的一侧固定连接有气缸,所述气缸远离所述一连接块的一侧固定连接有第二连接块。
9、本实用新型中,驱动部中包含设置在其内部上方的第一连接块以及第二连接块,第一连接块与回转机构中的第二连接法兰固定,第二连接块用于固定滑槽块,气缸作为驱动件,其气缸输出轴采用导轨式,有效控制涨紧块的定心精度以及推出的尺寸长度,以适应尺寸偏差。
10、作为优选,所述回转连接件包括与夹具本体可拆卸连接的第一连接板,所述第一连接板可拆卸连接有第二连接板,所述第二连接板可拆卸连接有用于和装夹座椅腿工件固定的第三连接板。
11、本实用新型中,第一连接板与夹具本体进行初步的卡接后,使用螺钉进行固定,第二连接板与第一连接板卡接后,使用螺钉固定,第三连接板与第二连接板卡接后,使用螺钉固定,由于第一连接板和第三连接板上均设置有腰型孔,故使其在高度及径向长度方向可调,以保证使用时,第三连接板的末端可有效卡入座椅腿工件凹槽内,从而能有效固定工件的周向角度。
12、作为优选,所述滑槽块固定连接于所述第二连接块,所述滑槽块远离所述夹具本体的一侧可拆卸连接于用于限位的端盖。
13、本实用新型中,端盖一方面能够起到限位的作用,防止涨紧块以及滑动推块的滑出,另一方面也起到保护的作用,防止滑槽块、涨紧块以及滑动推块零部件的损坏。
14、作为优选,所述滑动推块与所述气缸的气缸输出轴固定连接。
15、本实用新型中,滑动推块的顶部设置有连接部,与气缸引出的气缸输出轴进行固定,以保证滑动推块的滑动。
16、作为优选,所述固定芯柱与所述旋转套设置有轴承和密封圈,所述固定芯柱与所述第二连接法兰之间设置有密封垫片。
17、本实用新型中,设置的轴承能够保证旋转套的转动,密封圈以及密封垫片保证内部良好的密封环境。
18、作为优选,所述固定芯柱上方设置有用于和机器人连接的第一连接法兰。
19、本实用新型中,回转机构还与机器人进行连接,能够适应不同的应用场景。
20、作为优选,所述涨紧块靠近滑动推块的一侧设置有滑轨,所述滑动推块通过滑轨与若干个涨紧块滑动连接。
21、本实用新型中,涨紧块为周向均匀的设置在滑槽块的多个缺口中,其靠近滑动推块的一侧设有滑轨,且与滑动推块通过滑轨连接,多个滑轨角度相同,相互扣合。
22、本实用新型的有益效果是:本实用新型的一种座椅腿装夹装置,设置夹具本体用以对座椅腿工件进行装夹,设置回转连接件保证座椅腿工件的周向固定,采用了滑动涨紧的方式对座椅腿工件进行准确的装夹,保证对座椅腿工件的准确定位,实现快速装夹;此外,回转机构的设置能够防止打磨过程中气管缠绕导致的干涉问题。
技术特征:
1.一种座椅腿装夹装置,其特征在于,包括回转机构(400),所述回转机构(400)的一侧可拆卸连接有用于装夹座椅腿工件(300)的夹具本体(200),所述夹具本体(200)固定连接有用于座椅腿工件(300)周向固定的回转连接件(100);所述夹具本体(200)包括驱动部和由驱动部带动的滑动夹紧部,所述滑动夹紧部包括滑动推块(2-7)和与滑动推块(2-7)滑动连接的涨紧部,所述涨紧部包括滑槽块(2-4)和周向布置在滑槽块(2-4)上的若干个涨紧块(2-6),所述滑槽块(2-4)的一侧设置有端盖(2-5)。
2.根据权利要求1所述的一种座椅腿装夹装置,其特征在于,所述滑动推块(2-7)与若干个涨紧块(2-6)滑动连接,所述滑动推块(2-7)沿夹具本体(200)轴向滑动时,若干个涨紧块(2-6)沿所述滑槽块(2-4)径向移动。
3.根据权利要求1或2所述的一种座椅腿装夹装置,其特征在于,所述回转机构(400)包括固定芯柱(4-1)和设置在固定芯柱(4-1)下方的第二连接法兰(4-6),所述固定芯柱(4-1)的外侧设置有旋转套(4-2),所述旋转套(4-2)上设置有若干个上气管接头,所述上气管接头通过内部连接孔连通有设置在第二连接法兰(4-6)上的下气管接头。
4.根据权利要求1或2所述的一种座椅腿装夹装置,其特征在于,所述驱动部包括与回转机构(400)连接的第一连接块(2-1),所述第一连接块(2-1)远离所述回转机构(400)的一侧固定连接有气缸(2-2),所述气缸(2-2)远离所述一连接块(2-1)的一侧固定连接有第二连接块(2-3)。
5.根据权利要求1所述的一种座椅腿装夹装置,其特征在于,所述回转连接件(100)包括与夹具本体(200)可拆卸连接的第一连接板(1-1),所述第一连接板(1-1)可拆卸连接有第二连接板(1-2),所述第二连接板(1-2)可拆卸连接有用于和装夹座椅腿工件(300)固定的第三连接板(1-3)。
6.根据权利要求4所述的一种座椅腿装夹装置,其特征在于,所述滑槽块(2-4)固定连接于所述第二连接块(2-3),所述滑槽块(2-4)远离所述夹具本体(200)的一侧可拆卸连接于用于限位的端盖(2-5)。
7.根据权利要求4所述的一种座椅腿装夹装置,其特征在于,所述滑动推块(2-7)与所述气缸(2-2)的气缸输出轴固定连接。
8.根据权利要求3所述的一种座椅腿装夹装置,其特征在于,所述固定芯柱(4-1)与所述旋转套(4-2)设置有轴承(4-4)和密封圈(4-5),所述固定芯柱(4-1)与所述第二连接法兰(4-6)之间设置有密封垫片(4-7)。
9.根据权利要求3所述的一种座椅腿装夹装置,其特征在于,所述固定芯柱(4-1)上方设置有用于和机器人连接的第一连接法兰(4-3)。
10.根据权利要求2所述的一种座椅腿装夹装置,其特征在于,所述涨紧块(2-6)靠近滑动推块(2-7)的一侧设置有滑轨,所述滑动推块(2-7)通过滑轨与若干个涨紧块(2-6)滑动连接。
技术总结
本技术公开了一种座椅腿装夹装置,包括回转机构,回转机构的一侧可拆卸连接有用于装夹座椅腿工件的夹具本体,夹具本体固定连接有用于座椅腿工件周向固定的回转连接件;夹具本体包括驱动部和由驱动部带动的滑动夹紧部,滑动夹紧部包括滑动推块和与滑动推块滑动连接的涨紧部,涨紧部包括滑槽块和周向布置在滑槽块上的若干个涨紧块,滑槽块的一侧设置有端盖。解决了现有的座椅腿装夹装置定位不准甚至无法定位的问题,本技术设置夹具本体用以对座椅腿工件进行装夹,设置回转连接件保证座椅腿工件的周向固定,采用了滑动涨紧的方式对座椅腿工件进行准确的装夹,保证对座椅腿工件的准确定位,实现快速装夹。
技术研发人员:李华栋,张武,蔡得领
受保护的技术使用者:浙江娃哈哈智能机器人有限公司
技术研发日:20221118
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!