一种砂芯去毛刺自动装置及其控制方法与流程
本发明涉及一种砂芯去毛刺自动装置及其控制方法,特别地涉及一种用于汽车铸件砂芯去毛刺自动装置及其控制方法。
背景技术:
1、人工砂芯去毛刺工作重复度高,人工操作过于枯燥,并且容易产生因主观因素带来的打磨质量下降,比如工件部分拐角处没有修到等。长时间去毛刺后,工作区域内粉尘量较大,人工易吸入粉尘。所以实现砂芯去毛刺的自动化是有必要的,不仅能够提高去毛刺的打磨质量,降低人工成本,降低员工健康风险,同时也能够解决企业招工难,无法扩大产能的问题。
技术实现思路
1、有鉴于此,本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明实施例提出了一种砂芯去毛刺自动装置及其控制方法,实现了自动化对砂芯工件进行打磨,大大提升了砂芯工件的打磨质量和打磨效率,节省了打磨时间和打磨人工成本,扩大了打磨产能。
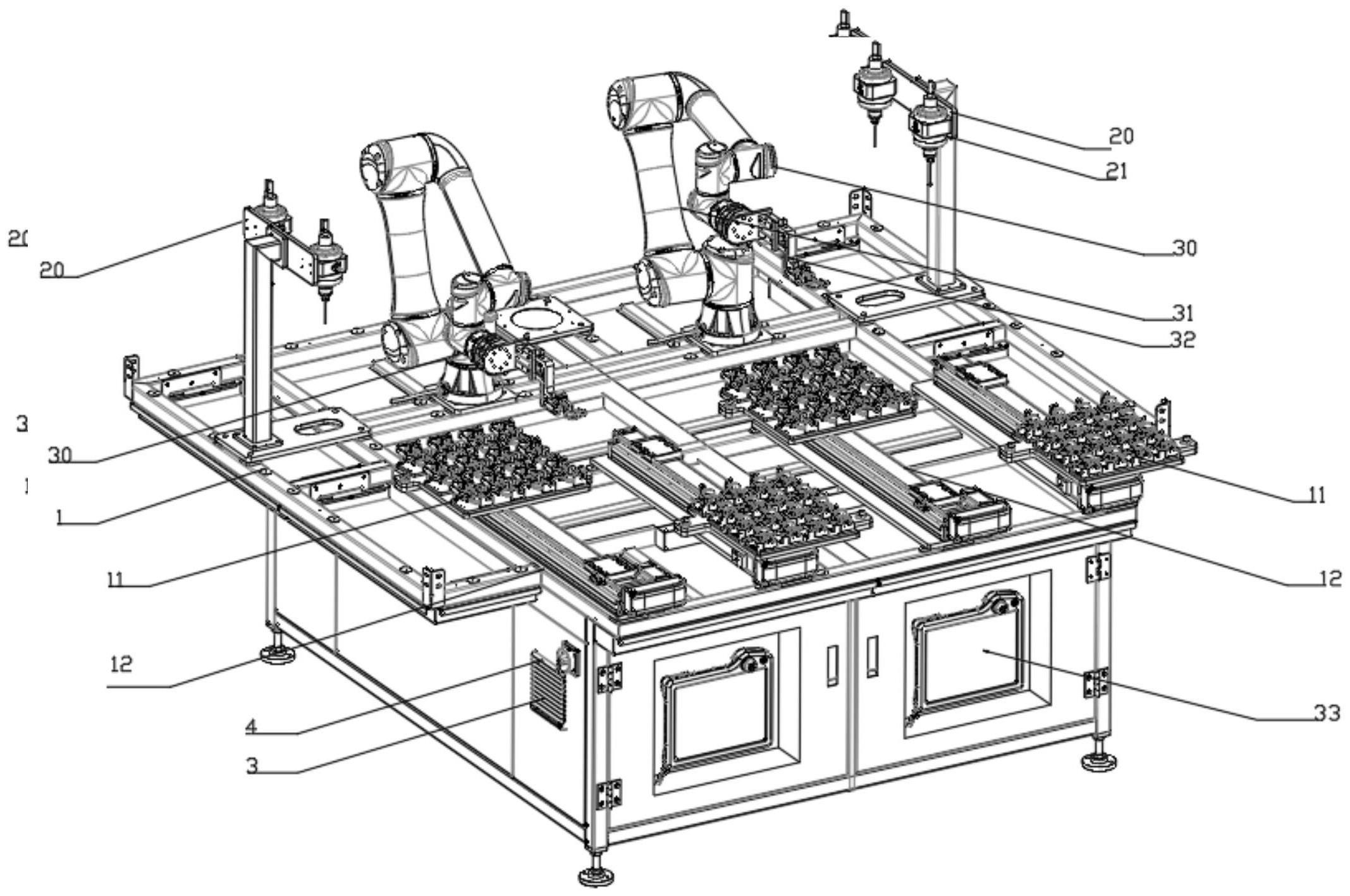
2、为了实现上述目的,本发明第一方面提供了一种砂芯去毛刺自动装置,包括:
3、工作台,所述工作台上设置有供料模块、去毛刺模块和机器人模块,
4、所述供料模块包括供料托盘,所述供料托盘用于放置砂芯工件;
5、所述去毛刺模块为至少两组,每组所述去毛刺模块包括浮动磨头,所述浮动磨头用于打磨砂芯工件;
6、所述机器人模块为至少两组,用于抓取砂芯工件进行打磨和打磨完成后将砂芯工件放回所述供料托盘,且每组所述机器人模块与所述去毛刺模块一一对应设置;
7、控制模块,所述供料模块、所述去毛刺模块和所述机器人模块分别与所述控制系统电连接。
8、根据本发明实施例的砂芯去毛刺自动装置,所述供料模块还包括滑台,所述供料托盘设置在所述滑台上且所述供料托盘可以在所述滑台上滑动。
9、根据本发明实施例的砂芯去毛刺自动装置,每一组所述机器人模块对应设置至少两个所述滑台,每个所述滑台上设置一个所述供料托盘。
10、根据本发明实施例的砂芯去毛刺自动装置,每组所述去毛刺模块包括至少两个所述浮动磨头。
11、根据本发明实施例的砂芯去毛刺自动装置,任一所述浮动磨头一端构造为磨针,所述浮动模头另一端构造为磨针或磨片。
12、根据本发明实施例的砂芯去毛刺自动装置,每组所述机器人模块包括相互连接的机械臂和末端执行器。
13、根据本发明实施例的砂芯去毛刺自动装置,所述末端执行器包括快换装置、气缸和夹爪,所述快换装置、所述气缸和所述夹爪沿远离所述机械臂的方向依次连接。
14、根据本发明实施例的砂芯去毛刺自动装置,所述气缸和所述快换装置之间设置有连接板。
15、根据本发明实施例的砂芯去毛刺自动装置,每组所述机器人模块包括机械臂控制器,所述机械臂控制器嵌入所述工作台且与所述控制模块电连接。
16、根据本发明实施例的砂芯去毛刺自动装置,所述工作台上设有安全护栏,所述供料模块、所述去毛刺模块和所述机器人模块均设置于所述安全护栏内。
17、根据本发明实施例的砂芯去毛刺自动装置,所述控制模块包括触摸屏和plc,所述触摸屏设置在所述安全护栏上,所述plc用于接收输入指令信号并反馈给所述机器人模块和/或接收所述机器人模块和所述去毛刺模块的信息并反馈给所述触摸屏。
18、根据本发明实施例的砂芯去毛刺自动装置,所述控制模块还包括按钮盒和警示灯,所述按钮盒和所述警示灯均设置在所述安全护栏上。
19、根据本发明实施例的砂芯去毛刺自动装置,所述触摸屏、所述按钮盒和所述警示灯设置在所述工作台的同一侧。
20、根据本发明实施例的砂芯去毛刺自动装置,还包括与所述控制模块连接的视觉识别模块,所述视觉识别模块包括视觉识别组件,所述视觉识别组件用于识别所述供料托盘上的物料。
21、本发明实施例的第二方面提供一种砂芯去毛刺自动装置的控制方法,其适用于上述的砂芯去毛刺自动装置,所述控制方法包括以下步骤:
22、s1识别砂芯工件,选择对应的打磨模式;
23、s2将砂芯工件装入供料模块并确认;
24、s3机器人模块抓取供料模块内的砂芯工件,进行打磨;
25、s4打磨完成后发送信号给控制模块,将打磨好的砂芯工件送出。
26、根据本发明实施例的砂芯去毛刺自动装置的控制方法,还包括以下步骤:
27、s0预先在砂芯去毛刺自动装置内存储针对不同工件的去毛刺配方;
28、s1识别砂芯工件,选择对应的去毛刺配方;
29、s2进一步选择对应的打磨模式;
30、s3将砂芯工件装入供料模块并确认;
31、s4机器人模块抓取供料模块内的砂芯工件,进行打磨;
32、s5打磨完成后发送信号给控制模块,将打磨好的砂芯工件送出。
33、根据本发明实施例的砂芯去毛刺自动装置的控制方法,所述打磨模式包括单臂模式和双臂模式:
34、所述单臂模式为两组机器人模块分开单独工作,每组机器人模块抓取砂芯工件后,配合各自的浮动磨头进行打磨;
35、所述双臂模式为两组机器人模块配合工作,一组机器人模块负责夹持砂芯工件,另一组机器人模块上安装浮动磨头并进行打磨。
36、与现有技术相比,本发明实施例的有益效果在于:本发明通过在工作台上设置供料模块、去毛刺模块和机器人模块,并通过控制模块与供料模块、去毛刺模块和机器人模块电连接从而实现了自动化对砂芯工件进行打磨,同时可实现兼容多种砂芯工件打磨。在使用时通过设置至少两组去毛刺模块和至少两组机器人模块进行打磨配合,精准覆盖复杂工件,大大提升了砂芯工件的打磨质量和打磨效率,节省了打磨时间和打磨人工成本,扩大了打磨产能。
37、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种砂芯去毛刺自动装置,其特征在于,包括:
2.根据权利要求1所述的砂芯去毛刺自动装置,其特征在于,所述供料模块还包括滑台,所述供料托盘设置在所述滑台上且所述供料托盘可以在所述滑台上滑动。
3.根据权利要求2所述的砂芯去毛刺自动装置,其特征在于,每一组所述机器人模块对应设置至少两个所述滑台,每个所述滑台上设置一个所述供料托盘。
4.根据权利要求1所述的砂芯去毛刺自动装置,其特征在于,每组所述去毛刺模块包括至少两个所述浮动磨头。
5.根据权利要求4所述的砂芯去毛刺自动装置,其特征在于,任一所述浮动磨头一端可构造为磨针,所述浮动模头另一端构造为磨针或磨片。
6.根据权利要求1所述的砂芯去毛刺自动装置,其特征在于,每组所述机器人模块包括相互连接的机械臂和末端执行器。
7.根据权利要求6所述的砂芯去毛刺自动装置,其特征在于,所述末端执行器包括快换装置、气缸和夹爪,所述快换装置、所述气缸和所述夹爪沿远离所述机械臂的方向依次连接。
8.根据权利要求7所述的砂芯去毛刺自动装置,其特征在于,所述气缸和所述快换装置之间设置有连接板。
9.根据权利要求6所述的砂芯去毛刺自动装置,其特征在于,每组所述机器人模块包括机械臂控制器,所述机械臂控制器嵌入所述工作台且与所述控制模块电连接。
10.根据权利要求1所述的砂芯去毛刺自动装置,其特征在于,所述工作台上设有安全护栏,所述供料模块、所述去毛刺模块和所述机器人模块均设置于所述安全护栏内。
11.根据权利要求10所述的砂芯去毛刺自动装置,所述控制模块包括触摸屏和plc,所述触摸屏设置在所述安全护栏上,所述plc用于接收输入指令信号并反馈给所述机器人模块和/或接收所述机器人模块和所述去毛刺模块的信息并反馈给所述触摸屏。
12.根据权利要求11所述的砂芯去毛刺自动装置,其特征在于,所述控制模块还包括按钮盒和警示灯,所述按钮盒和所述警示灯均设置在所述安全护栏上。
13.根据权利要求12所述的砂芯去毛刺自动装置,其特征在于,所述触摸屏、所述按钮盒和所述警示灯设置在所述工作台的同一侧。
14.根据权利要求1所述的砂芯去毛刺自动装置,其特征在于,还包括与所述控制模块连接的视觉识别模块,所述视觉识别模块包括视觉识别组件,所述视觉识别组件用于识别所述供料托盘上的物料。
15.一种砂芯去毛刺自动装置的控制方法,其适用于权利要求1-14中任一项所述的砂芯去毛刺自动装置,其特征在于,所述控制方法包括以下步骤:
16.根据权利要求15所述的砂芯去毛刺自动装置的控制方法,其特征在于,还包括以下步骤:
17.根据权利要求15所述的砂芯去毛刺自动装置的控制方法,所述打磨模式包括单臂模式和双臂模式:
技术总结
本发明公开了一种砂芯去毛刺自动装置及其控制方法,包括工作台,所述工作台上设置有供料模块、去毛刺模块和机器人模块,所述供料模块包括供料托盘,所述供料托盘用于放置砂芯工件,所述去毛刺模块为至少两组,每组所述去毛刺模块包括浮动磨头,所述浮动磨头用于打磨砂芯工件,所述机器人模块为至少两组,用于抓取砂芯工件进行打磨和打磨完成后将砂芯工件放回所述供料托盘,且每组所述机器人模块与所述去毛刺模块一一对应设置;控制模块,所述供料模块、所述去毛刺模块、所述机器人模块分别与所述控制系统电连接。本发明实现了自动化打磨砂芯工件,可兼容多种砂芯工件打磨,提升了砂芯工件的打磨质量和打磨效率,节省了打磨时间和打磨人工成本。
技术研发人员:于圣龙,姜涛钦,曹满
受保护的技术使用者:长广溪智能制造(无锡)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!