人防门智能打磨换刀系统及换刀方法与流程
本发明涉及人防门打磨,具体涉及一种人防门智能打磨换刀系统及换刀方法。
背景技术:
1、众所周知,目前,采用机器人打磨工件的技术已经开始逐步取代传统的人工打磨方式,但机器人所夹持的动力头上的刀具通常是单一且固定的,只适用于外形特征比较统一的工件;而对于外形特征复杂多变的工件,或者有不同打磨类型要求的,如人防门的焊点打磨,需要先用金刚砂轮打磨,再用角磨片对金刚砂轮打磨余高进行抛磨处理,让打磨后的焊疤与本体圆滑过渡。单一的刀具就无法同时适用于所有不同特征的打磨作业;目前采取的补救形式主要是采用多台机器人,各自夹持带有不同的刀具的动力头,对同一个位置的工件进行作业或者在流水线上的多个位置进行作业,多台机器人对同一个位置的工件进行作业时,为避免相互之间的干涉,通常是在一台机器人进行作业时,旁边可能会进入其作业区间的机器人要在原始位置等待,只有作业区域互不相关的机器人才可同时作业,这种系统形式只适用于外形特征不是太复杂,只需要两到三种刀具即可完成所有工作的工件,并且机器人有大量的等待时间,设备的开动率较低;多台机器人在流水线上的多个位置进行作业,适用于大批量且品种单一的作业;当更换产品时,有可能需要对所有机器人的刀具都进行更换,这种系统形式占用空间较大,且不适合灵活多变的市场形势。
2、以上两种形式都需要配置多台机器人,投资较高,后期的使用与维护成本也居高不下。
技术实现思路
1、本发明的目的在于提供一种人防门智能打磨换刀系统及换刀方法,能够根据人防门不同打磨工序而自动更换刀具。
2、为实现上述目的,本发明提供如下技术方案:
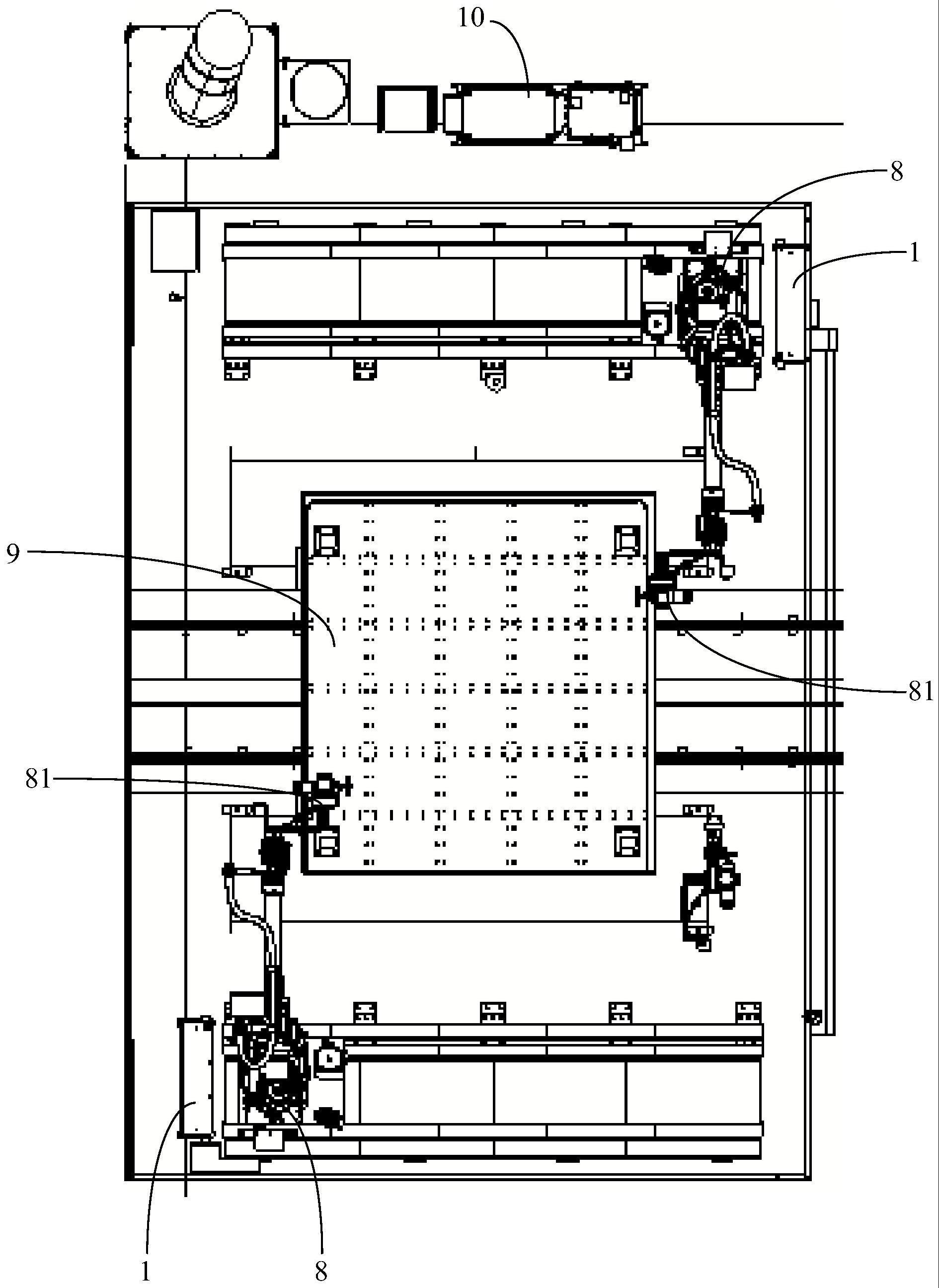
3、一种人防门智能打磨换刀系统,包括机器人、工作台和刀具,其中:
4、机器人手臂的末端安装带有自动换刀功能的动力头和相机,机器人在臂展范围内任意移动动力头;
5、刀具安放于自动刀具库中,在机器人臂展范围内固定自动刀具库,自动刀具库呈立方体盒子状,内部排列安放不同种类的备用刀具,自动刀具库箱体在面向机器人的一侧装设可开合的保护罩;
6、工作台固定在机器人臂展范围内;
7、机器人本身的动作由自带的控制器控制运行,其余设备由固定在机器人后方电控柜内的plc控制器统一控制,包括动力头的启停、松刀与拉刀,保护罩的开合。
8、作为本发明进一步的方案,所述自动刀具库内排列的所有刀具,柄部的接口尺寸一致,均适用于所选动力头。
9、作为本发明进一步的方案,所述保护罩只在需要更换刀具时打开,在打磨作业时处于关闭状态。
10、作为本发明进一步的方案,所述自动刀具库箱体内部上下分层分布有至少两道刀架横梁。
11、作为本发明进一步的方案,所述刀具安装于bt刀柄上,所述刀架横梁上固定有夹具,所述夹具一侧开口且沿开口中间开设供卡设所述bt刀柄的卡槽。
12、作为本发明进一步的方案,所述保护罩通过线性执行器滑动安装于所述自动刀具库箱体面向机器人的一侧上。
13、作为本发明进一步的方案,所述保护罩与所述自动刀具库箱体之间沿线性执行器的伸缩方向设置有导轨。
14、作为本发明进一步的方案,所述线性执行器采用气缸或电动推杆。
15、作为本发明进一步的方案,所述保护罩包括内外交叠且相对滑动连接的至少两个罩壳,至少两个罩壳中位于最内侧的罩壳与所述自动刀具库箱体固定、位于最外侧的罩壳与所述线性执行器固定。
16、一种采用如上所述人防门智能打磨换刀系统实现的人防门智能打磨换刀方法,其包括以下步骤:
17、将人防门放置在工作台上;
18、机器人移动到人防门处,机器人移动带有第一种刀具的动力头开始进行打磨作业;
19、当第一种刀具打磨完毕后,机器人移动至自动刀具库处,保护罩打开,机器人手臂上的相机对自动刀具库进行拍照,识别库位上的刀具有无情况,若无则执行换刀程序;若有则移动至下一库位直至识别到库位上无刀具,执行换刀程序;
20、换刀程序包括:机器人将动力头上的第一种刀具放置到无刀具的库位上,移动动力头至准备更换的第二种刀具的库位处,机器人手臂上的相机进行拍照,判断是否有第二种刀具,若有则执行取刀程序;若无则移动至同种类刀具的其他库位,直至识别到库位上有刀具,执行取刀程序;
21、plc控制器预存初始状态下自动刀具库内备用刀具数量,当每执行完毕一次换刀程序后,备用刀具数量减1,直至备用刀具数量为0时,发出刀具全部使用完毕的信号。
22、由于采用上述技术方案,使得本发明具有以下有益效果:采用一台机器人夹持动力头,可以针对人防门不同打磨工序配合自动刀具库来自动选用不同的刀具进行打磨作业,占用空间小,布局紧凑,安全可靠。
技术特征:
1.一种人防门智能打磨换刀系统,包括机器人、工作台和刀具,其特征在于:
2.如权利要求1所述的人防门智能打磨换刀系统,其特征在于,所述自动刀具库内排列的所有刀具,柄部的接口尺寸一致,均适用于所选动力头。
3.如权利要求1所述的人防门智能打磨换刀系统,其特征在于,所述保护罩只在需要更换刀具时打开,在打磨作业时处于关闭状态。
4.如权利要求1所述的人防门智能打磨换刀系统,其特征在于,所述自动刀具库箱体内部上下分层分布有至少两道刀架横梁。
5.如权利要求4所述的人防门智能打磨换刀系统,其特征在于,所述刀具安装于bt刀柄上,所述刀架横梁上固定有夹具,所述夹具一侧开口且沿开口中间开设供卡设所述bt刀柄的卡槽。
6.如权利要求1所述的人防门智能打磨换刀系统,其特征在于,所述保护罩通过线性执行器滑动安装于所述自动刀具库箱体面向机器人的一侧上。
7.如权利要求6所述的人防门智能打磨换刀系统,其特征在于,所述保护罩与所述自动刀具库箱体之间沿线性执行器的伸缩方向设置有导轨。
8.如权利要求6所述的人防门智能打磨换刀系统,其特征在于,所述线性执行器采用气缸或电动推杆。
9.如权利要求6所述的人防门智能打磨换刀系统,其特征在于,所述保护罩包括内外交叠且相对滑动连接的至少两个罩壳,至少两个罩壳中位于最内侧的罩壳与所述自动刀具库箱体固定、位于最外侧的罩壳与所述线性执行器固定。
10.一种采用如权利要求1~9中任一项的所述人防门智能打磨换刀系统实现的人防门智能打磨换刀方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种人防门智能打磨换刀系统及换刀方法,系统包括机器人、工作台和刀具,机器人手臂末端安装带自动换刀功能的动力头和相机,机器人在臂展范围内任意移动动力头;在机器人臂展范围内固定自动刀具库,自动刀具库内部排列安放不同种类的备用刀具,在面向机器人的一侧装设可开合的保护罩;工作台固定在机器人臂展范围内;机器人本身的动作由自带的控制器控制运行,其余设备由固定在机器人后方电控柜内的PLC控制器统一控制,包括动力头的启停、松刀与拉刀,保护罩的开合。本发明采用一台机器人夹持动力头,可以针对人防门不同打磨工序配合自动刀具库来自动选用不同的刀具进行打磨作业,占用空间小,布局紧凑,安全可靠。
技术研发人员:常甲兴,赵唯,胡鹏飞,吴艳
受保护的技术使用者:上海地空防护设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!