人防门智能打磨视觉系统及标定方法与流程
本发明涉及人防门打磨,具体涉及一种人防门智能打磨视觉系统及标定方法。
背景技术:
1、人防门是属于民防防护设备,就是人民防护工程出入口的门,同时人防门是门窗行业的重要组成部分,人防门大概分为普通单、双扇防护密闭门和密闭门、活门槛单、双扇防护密闭门和密闭门、胶管式防爆波活门、悬摆式防爆波(屏蔽)活门等,大部分人防门为了保证安全性能,大都选用金属材质进行制造加工,因此,对于人防门的制造加工少不了焊接工艺。
2、在焊接过后为了保证人防门的外表面的平整,往往需要对一些焊接点进行打磨,将焊接点磨平以保证人防门外表面的平整。现有的焊点打磨大都采用人工打磨的方式,工作人员需要对人防门上的焊点逐一打磨,人防门一般体积较大,容易出现遗漏,对工作人员的操作要求较高,且整体工作效率低下,打磨精度也难以保证。
技术实现思路
1、本发明的目的在于提供一种人防门智能打磨视觉系统及标定方法,有利于提高人防门打磨效率和打磨精度。
2、为实现上述目的,本发明提供如下技术方案:
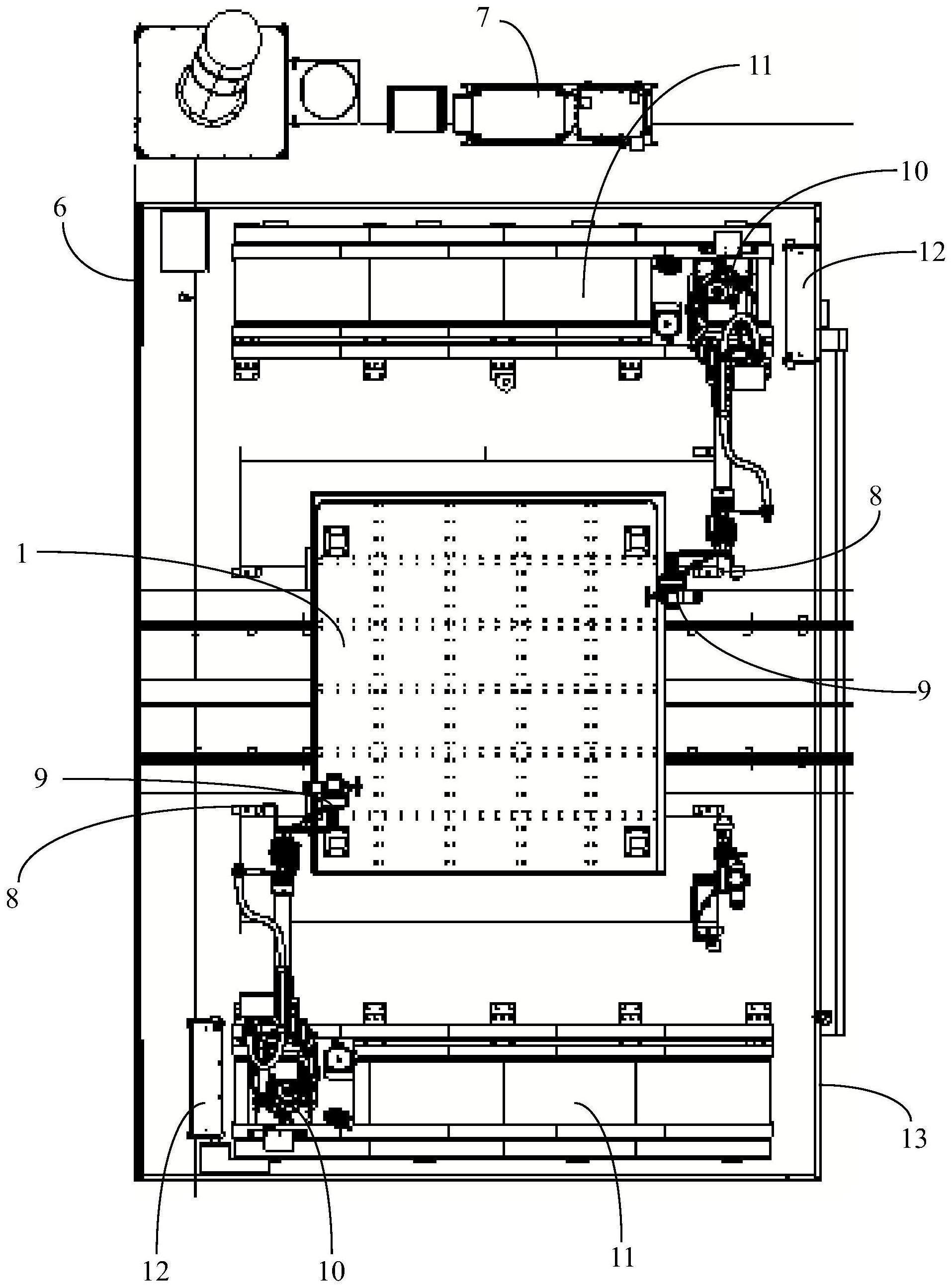
3、一种人防门智能打磨视觉系统,其包括plc控制器、rgv送料装置和机器人,所述机器人执行末端设置打磨头和视觉相机,所述视觉相机下方设置打磨平台,所述plc控制器控制连接所述rgv送料装置、所述机器人、所述打磨头和所述视觉相机,所述rgv送料装置与所述打磨平台连接;
4、在打磨平台的中心设置基准产品,所述plc控制器获取基准产品的尺寸,在机器人坐标系下标定基准产品的特征坐标点,编写机器人打磨头打磨所述基准产品的基准打磨程序;
5、通过rgv送料装置将待打磨新产品输送至打磨平台上,所述plc控制器获取新产品的尺寸,计算新产品与基准产品的尺寸差值,调整rgv送料装置的输送程序,使得新产品位于打磨平台的中心;
6、根据新产品与基准产品的尺寸差值预估机器人坐标系下新产品的特征坐标点,所述plc控制器控制机器人带着视觉相机移动到预估的特征坐标点,通过视觉相机进行拍摄并上传图像至plc控制器,所述plc控制器对图像进行处理确定新产品的特征坐标点,对基准打磨程序进行调试,得到与新产品匹配的打磨程序。
7、作为本发明进一步的方案,所述视觉相机采用ccd相机。
8、作为本发明进一步的方案,所述系统还包括主控制面板,与所述plc控制器连接,用于获取产品尺寸数据及plc控制指令。
9、作为本发明进一步的方案,在所述搭配平台的两侧平行设置供机器人行走机构,机器人沿机器人行走机构移动。
10、作为本发明进一步的方案,所述机器人行走机构为轨道。
11、一种利用如上所述人防门智能打磨视觉系统的视觉标定方法,其包括以下步骤:
12、在打磨平台的中心设置基准产品,plc控制器获取基准产品的尺寸,在机器人坐标系下标定基准产品的特征坐标点,编写机器人打磨头打磨所述基准产品的基准打磨程序;
13、通过rgv送料装置将待打磨新产品输送至打磨平台上,所述plc控制器获取新产品的尺寸,计算新产品与基准产品的尺寸差值,调整rgv送料装置的输送程序,使得新产品位于打磨平台的中心;
14、根据新产品与基准产品的尺寸差值预估机器人坐标系下新产品的特征坐标点,所述plc控制器控制机器人带着视觉相机移动到预估的特征坐标点,通过视觉相机进行拍摄并上传图像至plc控制器,所述plc控制器对图像进行处理确定新产品的特征坐标点,对基准打磨程序进行调试,得到与新产品匹配的打磨程序。
15、由于采用上述技术方案,使得本发明具有以下有益效果:通过视觉相机与机器人的配合,获取待打磨产品的特征坐标点,控制机器人打磨头进行自动打磨,提高打磨效率和打磨精度。
技术特征:
1.一种人防门智能打磨视觉系统,其特征在于:包括plc控制器、rgv送料装置和机器人,所述机器人执行末端设置打磨头和视觉相机,所述视觉相机下方设置打磨平台,所述plc控制器控制连接所述rgv送料装置、所述机器人、所述打磨头和所述视觉相机,所述rgv送料装置与所述打磨平台连接;
2.如权利要求1所述的人防门智能打磨视觉系统,其特征在于:所述视觉相机采用ccd相机。
3.如权利要求1所述的人防门智能打磨视觉系统,其特征在于:还包括主控制面板,与所述plc控制器连接,用于获取产品尺寸数据及plc控制指令。
4.如权利要求1所述的人防门智能打磨视觉系统,其特征在于:在所述搭配平台的两侧平行设置供机器人行走机构,机器人沿机器人行走机构移动。
5.如权利要求4所述的人防门智能打磨视觉系统,其特征在于:所述机器人行走机构为轨道。
6.一种利用如权利要求1~5中任一项的所述人防门智能打磨视觉系统的视觉标定方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种人防门智能打磨视觉系统及标定方法,系统包括PLC控制器、RGV送料装置和机器人,所述机器人执行末端设置打磨头和视觉相机,所述视觉相机下方设置打磨平台,所述PLC控制器控制连接所述RGV送料装置、所述机器人、所述打磨头和所述视觉相机,所述RGV送料装置与所述打磨平台连接。本发明通过视觉相机与机器人的配合,获取待打磨产品的特征坐标点,控制机器人打磨头进行自动打磨,提高打磨效率和打磨精度。
技术研发人员:胡鹏飞,赵唯,常甲兴,吴艳
受保护的技术使用者:上海地空防护设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!