自动化装配机器人及加工站位跟踪控制方法与流程
本发明涉及自动化装配设备,尤其涉及一种自动化装配机器人及加工站位跟踪控制方法。
背景技术:
1、在零部件加工生产中,操作机床等设备的工作人员在准备零部件加工时,都是通过人力将待加工的零部件移动至机床上进行固定,然后再进行加工。
2、但是现有零部件的加工多为人工操作,加工过程需要耗费大量的人力和时间,导致加工效率低。
技术实现思路
1、本发明的目的在于提供一种自动化装配机器人及加工站位跟踪控制方法,解决了现有零部件的加工多为人工操作,加工过程需要耗费大量的人力和时间,导致加工效率低的问题。
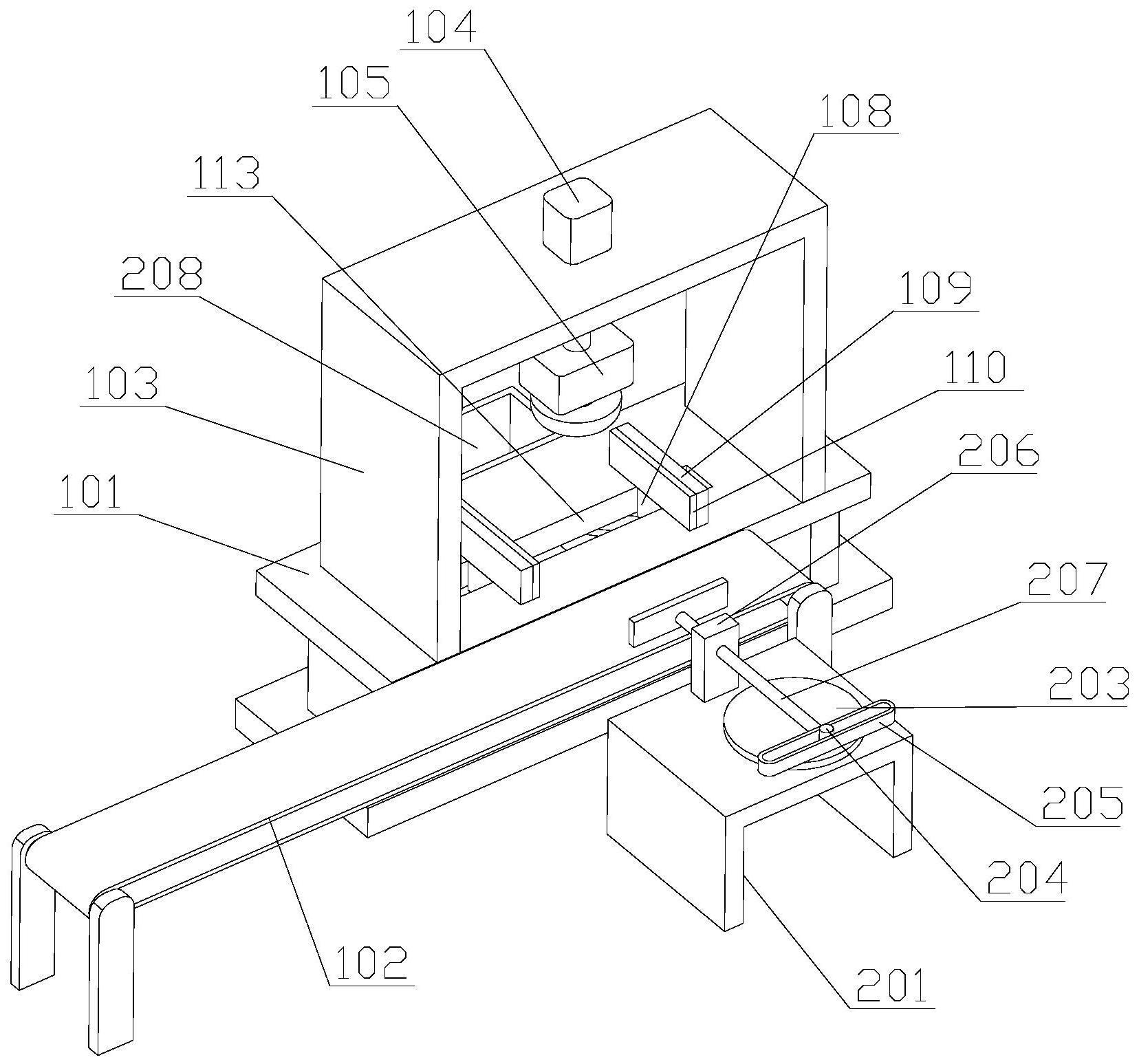
2、为实现上述目的,本发明采用的一种自动化装配机器人,包括底座、输送带、固定架、气缸、打磨器和固定组件,所述输送带设置于所述底座的一侧,所述固定架设置于所述底座的上方,所述气缸与所述固定架固定连接,所述打磨器有所述气缸的输出端固定连接;
3、所述固定组件包括驱动件、第一连接杆、两根第二连接杆、两块限位块和两个夹套,所述驱动件设置于所述底座内,所述底座具有限位孔,两块所述限位块对称设置于所述限位孔内,所述第一连接杆与所述驱动件固定连接,每根所述第二连接杆的两端分别与所述第一连接杆和对应的所述限位块转动连接,两个所述夹套分别与对应的所述限位块固定连接,并位于所述限位块的上方。
4、其中,所述固定组件还包括两块橡胶垫,每块所述橡胶垫分别与对应的所述夹套固定连接,并分别位于所述夹套的内侧壁。
5、其中,所述驱动件包括支撑座和驱动电机,所述支撑座与所述底座固定连接,并位于所述底座内,所述驱动电机与所述支撑座固定连接,所述第一连接杆与所述驱动电机固定连接。
6、其中,所述自动化装配机器人还包括推料组件,所述推料组件设置于所述输送带外侧。
7、其中,所述推料组件包括支撑架、伺服电机、圆盘、圆轴、滑动框、滑动座和推杆,所述支撑架设置于所述输送带的外侧,所述伺服电机与所述支撑架固定连接,并位于所述支撑架的上方,所述滑动座设置于所述支撑架的上方,所述圆盘与所述伺服电机的输出端固定连接,所述圆轴与所述圆盘固定连接,并与所述圆盘呈偏心设置,所述滑动框与所述圆轴活动连接,所述推杆与所述滑动座滑动连接,并贯穿所述滑动座,所述推杆还与所述滑动框固定连接。
8、其中,所述推料组件还包括收集框,所述收集框与所述底座固定连接,并位于所述底座的外侧。
9、本发明还提供一种加工站位跟踪控制方法,应用于如自动化装配机器人,包括如下步骤:
10、通过红外摄像对零部件加工进行跟踪;
11、将零部件通过所述输送带向所述底座输送;
12、通过带动所述推杆将所述输送带上的零部件向所述底座上的两个所述夹套之间推送;
13、启动所述驱动电机控制两个所述夹套将零部件夹持;
14、启动所述气缸和所述打磨器对零部件表面进行打磨处理;
15、将零部件打磨完成后,将零部件在所述收集框内收集。
16、本发明的一种自动化装配机器人及加工站位跟踪控制方法,对零部件进行加工时,通过将零部件在所述输送带上放置,所述输送带将零部件向所述底座输送,然后将零部件在所述底座上的两个所述夹套之间放置,启动所述驱动件,所述驱动件带动所述第一连接杆转动,所述第一连接杆的两端会分别拉动两根所述第二连接杆,此时每根所述第二连接杆的两端会分别在所述第一连接杆和限位块进行角度转动,每根所述第二连接杆会带动所述限位块在所述限位孔内移动,使得两块所述夹套逐渐向零部件靠近,并将所述零部件进行固定,然后启动所述固定架上的所述气缸,所述气缸打动所述打磨器对零部件的表面进行打磨处理,上述过程对零部件的加工方便快捷,减少了人员的工作量,实现了能够便于将零部件进行加工,减少了人力和时间,提高了加工效率。
技术特征:
1.一种自动化装配机器人,其特征在于,
2.如权利要求1所述的自动化装配机器人,其特征在于,
3.如权利要求2所述的自动化装配机器人,其特征在于,
4.如权利要求3所述的自动化装配机器人,其特征在于,
5.如权利要求4所述的自动化装配机器人,其特征在于,
6.如权利要求5所述的自动化装配机器人,其特征在于,
7.一种加工站位跟踪控制方法,应用于如权利要求6的自动化装配机器人,其特征在于,包括如下步骤:
技术总结
本发明涉及自动化装配设备技术领域,具体涉及一种自动化装配机器人及加工站位跟踪控制方法;包括底座、输送带、固定架、气缸、打磨器和固定组件,输送带设置于底座的一侧,固定架设置于底座的上方,气缸与固定架固定连接,打磨器有气缸的输出端固定连接;固定组件包括驱动件、第一连接杆、两根第二连接杆、两块限位块和两个夹套,驱动件设置于底座内,两块限位块对称设置于限位孔内,第一连接杆与驱动件固定连接,每根第二连接杆的两端分别与第一连接杆和对应的限位块转动连接,两个夹套分别与对应的限位块固定连接,通过上述结构的设置,实现了能够便于将零部件进行加工,减少了人力和时间,提高了加工效率。
技术研发人员:贾珊金
受保护的技术使用者:南京事达机械设备制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!