一种减薄机设备及晶圆定位方法与流程
本申请涉及集成电路,特别是涉及一种减薄机设备及晶圆定位方法。
背景技术:
1、在半导体领域,晶圆减薄经过多年发展已经比较成熟,晶圆减薄设备也越来越成熟,然而在利用晶圆减薄机对晶圆进行磨边的工艺方向还未发展成熟。
2、然而,在晶圆磨边工艺中需要保证旋转平台和晶圆的相对同心,目前常用的是,将定位工装和陶瓷吸盘进行配合定位,再利用三个手爪的同步向心运动将晶圆推至和陶瓷吸盘相对同心。
3、但是,现有存在以下缺点:
4、1、操作复杂、每次定位都需要放置定位工装;
5、2、定位精度低,由于定位工装首先要与陶瓷吸盘进行配合,再加上定位工装手爪运动过程会产生各种运动精度偏差。
6、以上两种因素叠加会导致整体定位精度较低。
技术实现思路
1、本发明针对上述缺点,旨在解决如保证旋转平台和晶圆的相对同心。基于此,本发明有必要针对上述技术问题,提供一种减薄机设备及晶圆定位方法。
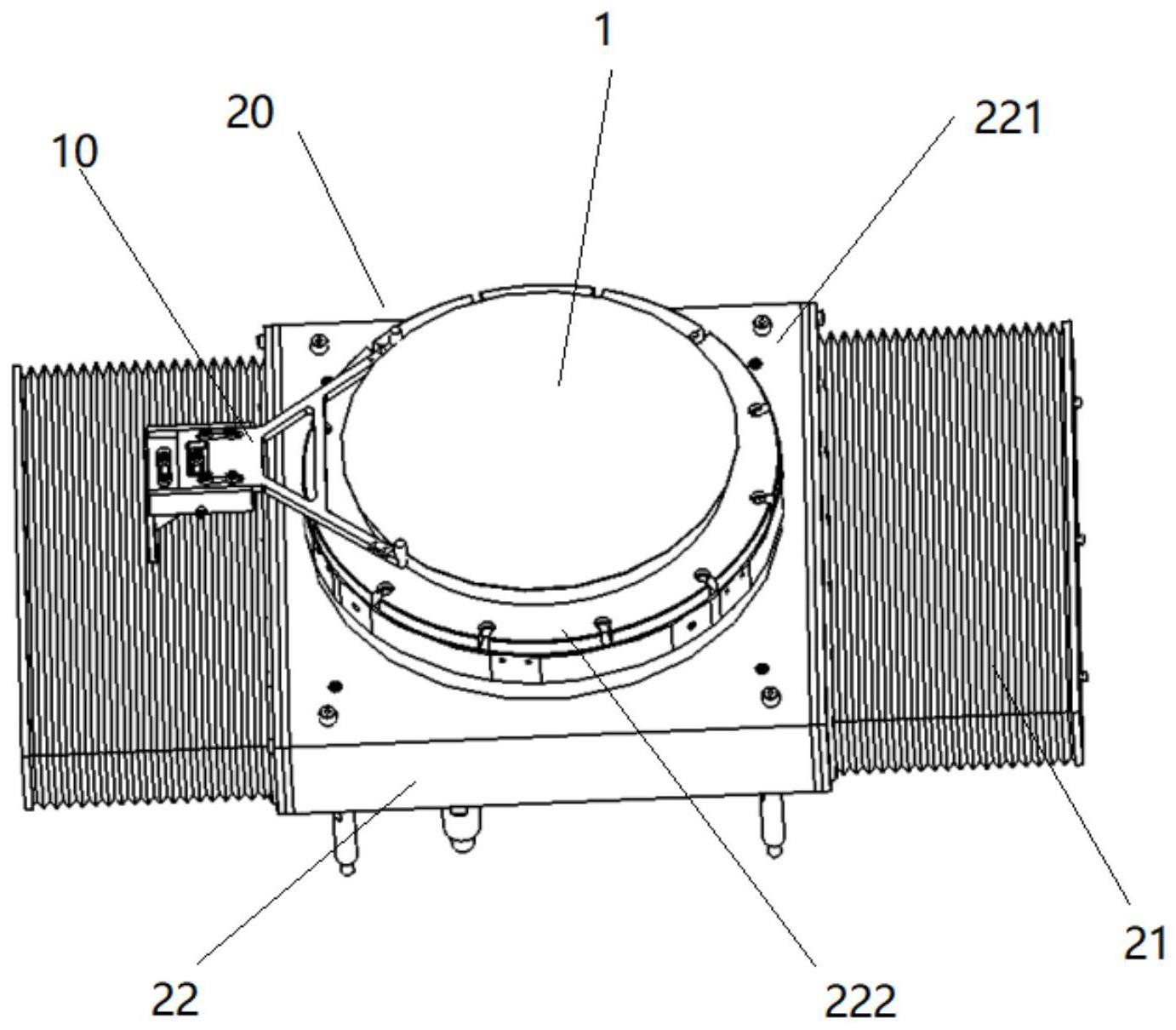
2、本发明提出了一种减薄机设备,所述减薄机设备包括设备本体、定位结构以及移动台,所述定位结构固定在设备本体上,所述工作位于定位结构下方;其中,
3、所述定位结构至少包括固定部和定位部,所述定位部固定在所述固定部上,所述定位部用于定位晶圆位置;
4、所述移动台包括移动部和承载部,所述承载部设置在两个移动部之间,所述移动部用于带动所述承载部横向移动。
5、作为一个可替换的实施例,所述定位部包括定位手爪和设置在定位手爪端部的定位手指;
6、所述固定部包括竖直固定板和水平固定板,所述竖直固定板和水平固定板可拆卸地固定为整体结构,所述定位部安装固定在水平固定板上,所述竖直固定板安装固定在减薄机设备上。
7、作为一个可替换的实施例,所述定位手指具有相切圆柱,所述相切圆柱位于定位手指的端部,所述定位手指可拆卸安装在定位手爪上。
8、作为一个可替换的实施例,所述定位手爪为扇形,包括连接板、支撑杆和两个连接杆,每个所述连接杆的一端均固定一个定位手指,每个所述连接杆的另一端均与连接板固定,所述支撑杆的两端分别固定在连接杆的中部,所述连接板可拆卸地安装固定在水平固定板上。
9、作为一个可替换的实施例,所述固定部还包括侧板,两个所述侧板分别设置在水平固定板的两侧。
10、作为一个可替换的实施例,所述所述承载部包括工作台和固定在所述工作台上的吸盘,所述晶圆真空吸附在吸盘上。
11、本发明提出了一种上述减薄机设备的晶圆定位方法,所述晶圆定位方法包括:
12、确定待加工晶圆的圆心;
13、确定所述移动台的目标位置,计算移动台的移动距离,调整移动台移动至目标位置;
14、放置待加工晶圆至移动台的吸盘上,所述晶圆与定位手指相切;
15、完成待加工晶圆的定位,所述待加工晶圆与吸盘同心。
16、作为一个可替换的实施例,所述目标位置为,在该目标位置时,所述吸盘的圆心到两个定位手指的相切圆柱的圆心距离等于待加工晶圆的半径与定位手指的相切圆柱的半径之和。
17、作为一个可替换的实施例,所述移动台的移动为直线移动,所述吸盘的圆心与定位手爪的两个连接杆的交点的连线为移动台的横移方向。
18、作为一个可替换的实施例,所述移动距离为初始位置的吸盘的圆心与目标位置的吸盘的圆心在移动台的横移方向上的间距。
19、上述减薄机设备及晶圆定位方法,通过在减薄机内增加定位手爪机构,可以实现在减薄机磨边工艺中对晶圆的定位。同时,实施成本低,安装方便,定位过程简单快捷,定位精度更高。
技术特征:
1.一种减薄机设备,其特征在于,所述减薄机设备包括设备本体、定位结构以及移动台,所述定位结构固定在设备本体上,所述移动台位于定位结构下方;其中,
2.根据权利要求1所述的减薄机设备,其特征在于,
3.根据权利要求2所述的减薄机设备,其特征在于,所述定位手指具有相切圆柱,所述相切圆柱位于定位手指的端部,所述定位手指可拆卸安装在定位手爪上。
4.根据权利要求2所述的减薄机设备,其特征在于,所述定位手爪包括连接板、支撑杆和两个连接杆,每个所述连接杆的一端均固定一个定位手指,每个所述连接杆的另一端均与连接板固定,所述支撑杆的两端分别固定在连接杆的中部,所述连接板可拆卸地安装固定在水平固定板上。
5.根据权利要求1所述的减薄机设备,其特征在于,所述固定部还包括侧板,两个所述侧板分别设置在水平固定板的两侧。
6.根据权利要求1所述的减薄机设备,其特征在于,所述所述承载部包括工作台和固定在所述工作台上的吸盘,所述晶圆真空吸附在吸盘上。
7.根据权利要求1-6任一项所述的减薄机设备的晶圆定位方法,其特征在于,所述晶圆定位方法包括:
8.根据权利要求7所述的减薄机设备的晶圆定位方法,其特征在于,所述目标位置为,在该目标位置时,所述吸盘的圆心到两个定位手指的相切圆柱的圆心距离等于待加工晶圆的半径与定位手指的相切圆柱的半径之和。
9.根据权利要求7所述的减薄机设备的晶圆定位方法,其特征在于,所述移动台的移动为直线移动,所述吸盘的圆心与定位手爪的两个连接杆的交点的连线为移动台的横移方向。
10.根据权利要求7所述的减薄机设备的晶圆定位方法,其特征在于,所述移动距离为初始位置的吸盘的圆心与目标位置的吸盘的圆心在移动台的横移方向上的间距。
技术总结
本申请涉及一种减薄机设备及晶圆定位方法,所述减薄机设备包括设备本体、定位结构以及移动台,所述定位结构固定在设备本体上,所述移动台位于定位结构下方;其中,所述定位结构至少包括固定部和定位部,所述定位部固定在所述固定部上,所述定位部用于定位晶圆位置;所述移动台包括移动部和承载部,所述承载部设置在两个移动部之间,所述移动部用于带动所述承载部横向移动。本发明实施成本低,安装方便,定位过程简单快捷,定位精度更高。
技术研发人员:刘宇
受保护的技术使用者:北京中电科电子装备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!