一种磨头自动插拔设备的制作方法
本发明涉及上料设备,尤其涉及一种磨头自动插拔设备。
背景技术:
1、目前,随着国内航空航天业、汽车制造业等行业的蓬勃发展,手机零部件、半导体芯片加工国有化需求提升,促使金刚石磨具在上述领域得到越来越广泛的应用。对于生产型企业,批量巨大的产品提高生产效率,降低制造成本至关重要。
2、针对电镀金刚石磨头生产过程中磨头产品规格多,植砂夹具上的磨头产品目前都是人工插拔到夹具盘上,造成产量和人员配置上出现瓶颈。另外,夹具盘上的产品受操作人员手工装配影响,其定位精度和间距误差比较大,对于采用夹爪抓取工件实现自动插拔上下料带来困难。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种磨头自动插拔设备,其可以装夹组件的装夹板放置磨头夹具盘,然后以夹取组件的夹爪夹取磨头夹具盘的磨头转动至置物盘的插孔内,完成自动磨头的自动插拔。
2、本发明的目的采用以下技术方案实现:
3、一种磨头自动插拔设备,包括,
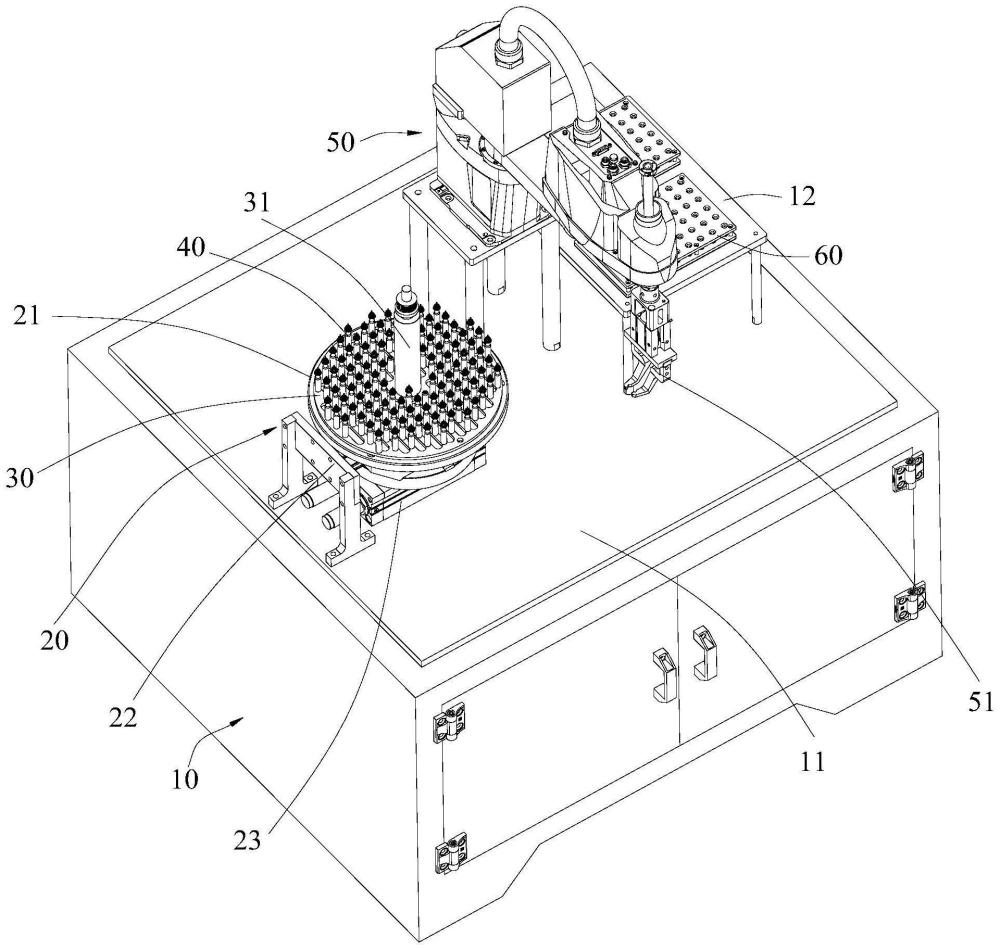
4、机体,所述机体上设有工作台,所述工作台上设有置物架,所述置物架用于放置带有多个插孔的置物盘;
5、装夹组件,所述装夹组件包括装夹座、用于装夹磨头夹具盘的装夹板以及转动件,所述装夹座安装于所述工作台上,所述装夹板安装于所述装夹座的顶端并与所述工作台的端面间隔设置并形成为安装空间;所述转动件安装于所述安装空间,所述转动件设有转动轴;所述装夹板上设有供磨头夹具盘的转轴穿过的穿接孔,所述穿接孔与所述转动轴对应设置并引导磨头夹具盘的转轴与所述转动轴连接;
6、夹取组件,所述夹取组件包括驱动件以及夹爪,所述驱动件安装于所述工作台,所述驱动件用于带动所述夹爪在所述置物架与所述装夹板之间往复运动;夹爪用于夹取或者放下磨头。
7、进一步地,所述夹爪包括夹持座以及两个夹持臂,两个夹持臂安装于所述夹持座并可相互靠近或者相互远离。
8、进一步地,所述夹持臂相互靠近的侧部设有避让凹槽。
9、进一步地,所述夹爪还包括升降气缸,所述升降气缸的缸体与驱动件的动力输出端连接,所述升降气缸的活塞杆与所述夹持座连接。
10、进一步地,所述驱动件为多轴机器人,所述多轴机器人的动力输出端与所述升降气缸的缸体连接。
11、进一步地,所述装夹板的两侧均设有定位销,所述定位销用于与磨头夹具盘的定位孔穿接定位。
12、进一步地,所述装夹座上设有气动手指以及气动手指驱动件,所述气动手指在所述气动手指驱动件的带动下靠近或者远离所述装夹空间,所述气动手指用于夹持或者松开磨头夹具盘的转轴。
13、进一步地,所述气动手指内侧设有圆弧凹位。
14、进一步地,所述转动件为旋转气缸。
15、进一步地,所述置物盘设有上下间隔分布的置物板,两个所述置物板上以连接柱连接,各个所述置物板上均设有多个所述插孔。
16、相比现有技术,本发明的有益效果在于:
17、装夹组件的驱动件可以带动夹爪运动至工作台的装夹板的上方,夹爪可以夹取磨头夹具盘上的磨头,然后驱动件再带动夹取磨头的夹爪运动至置物架的上方,并位于置物盘上,然后夹爪朝向置物盘的插孔运动,将磨头插装至插孔内完成磨头的自动插拔。此后,夹爪通过驱动件带动,由置物架转移至装夹板的上方,夹爪再次夹取磨头装夹板上的磨头,重复上述动作,完成磨头依次转移至置物架上的置物盘内,提高磨头自动插拔效率,减少人工成本。
技术特征:
1.一种磨头自动插拔设备,其特征在于,包括,
2.根据权利要求1所述的磨头自动插拔设备,其特征在于,所述夹爪包括夹持座以及两个夹持臂,两个夹持臂安装于所述夹持座并可相互靠近或者相互远离。
3.根据权利要求2所述的磨头自动插拔设备,其特征在于,所述夹持臂相互靠近的侧部设有避让凹槽。
4.根据权利要求2所述的磨头自动插拔设备,其特征在于,所述夹爪还包括升降气缸,所述升降气缸的缸体与驱动件的动力输出端连接,所述升降气缸的活塞杆与所述夹持座连接。
5.根据权利要求4所述的磨头自动插拔设备,其特征在于,所述驱动件为多轴机器人,所述多轴机器人的动力输出端与所述升降气缸的缸体连接。
6.根据权利要求1-5任一项所述的磨头自动插拔设备,其特征在于,所述装夹板的两侧均设有定位销,所述定位销用于与磨头夹具盘的定位孔穿接定位。
7.根据权利要求1-5任一项所述的磨头自动插拔设备,其特征在于,所述装夹座上设有气动手指以及气动手指驱动件,所述气动手指在所述气动手指驱动件的带动下靠近或者远离所述装夹空间,所述气动手指用于夹持或者松开磨头夹具盘的转轴。
8.根据权利要求7所述的磨头自动插拔设备,其特征在于,所述气动手指内侧设有圆弧凹位。
9.根据权利要求1-5任一项所述的磨头自动插拔设备,其特征在于,所述转动件为旋转气缸。
10.根据权利要求1-5任一项所述的磨头自动插拔设备,其特征在于,所述置物盘设有上下间隔分布的置物板,两个所述置物板上以连接柱连接,各个所述置物板上均设有多个所述插孔。
技术总结
本发明公开了一种磨头自动插拔设备,包括机体,机体上设有工作台,工作台上设有置物架,置物架用于放置带有多个插孔的置物盘;装夹组件,装夹组件包括装夹座、装夹板以及转动件,装夹板安装于装夹座的顶端并与工作台的端面间隔设置并形成为安装空间;转动件安装于安装空间,转动件设有转动轴;装夹板上设有供磨头夹具盘的转轴穿过的穿接孔,穿接孔与转动轴对应设置并引导磨头夹具盘的转轴与转动轴连接;夹取组件,夹取组件包括驱动件以及夹爪,驱动件用于带动夹爪在置物架与装夹板之间往复运动。本发明可以装夹组件的装夹板放置磨头夹具盘,然后以夹取组件的夹爪夹取磨头夹具盘的磨头转动至置物盘的插孔内,完成自动磨头的自动插拔。
技术研发人员:罗伟强,赵文钦,董留军,郭志双
受保护的技术使用者:深圳市常兴技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!