一种混凝土墙面打磨机器人及其使用方法与流程
本发明涉及工业制造,具体为一种混凝土墙面打磨机器人及其使用方法。
背景技术:
1、墙面打磨,是提高腻子表观质量、墙面平整度的重要工序之一。目前主要依靠人工手持墙面打磨机进行打磨,劳动强度较大,打磨效率低,容易出现遗漏,粉尘污染较重,危害工人健康。
2、针对装修行业中墙面打磨这一部分,考虑到劳动力短缺、打磨过程时会产生大量粉尘以及工人存在高空作业风险、工作质量一致难以保证、工作效率低等问题,引入墙面打磨移动机器人代替工人作业是十分有必要的且意义重大。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种混凝土墙面打磨机器人及其使用方法,解决了目前主要依靠人工手持墙面打磨机进行打磨,劳动强度较大,打磨效率低,容易出现遗漏,粉尘污染较重,危害工人健康的问题。
3、(二)技术方案
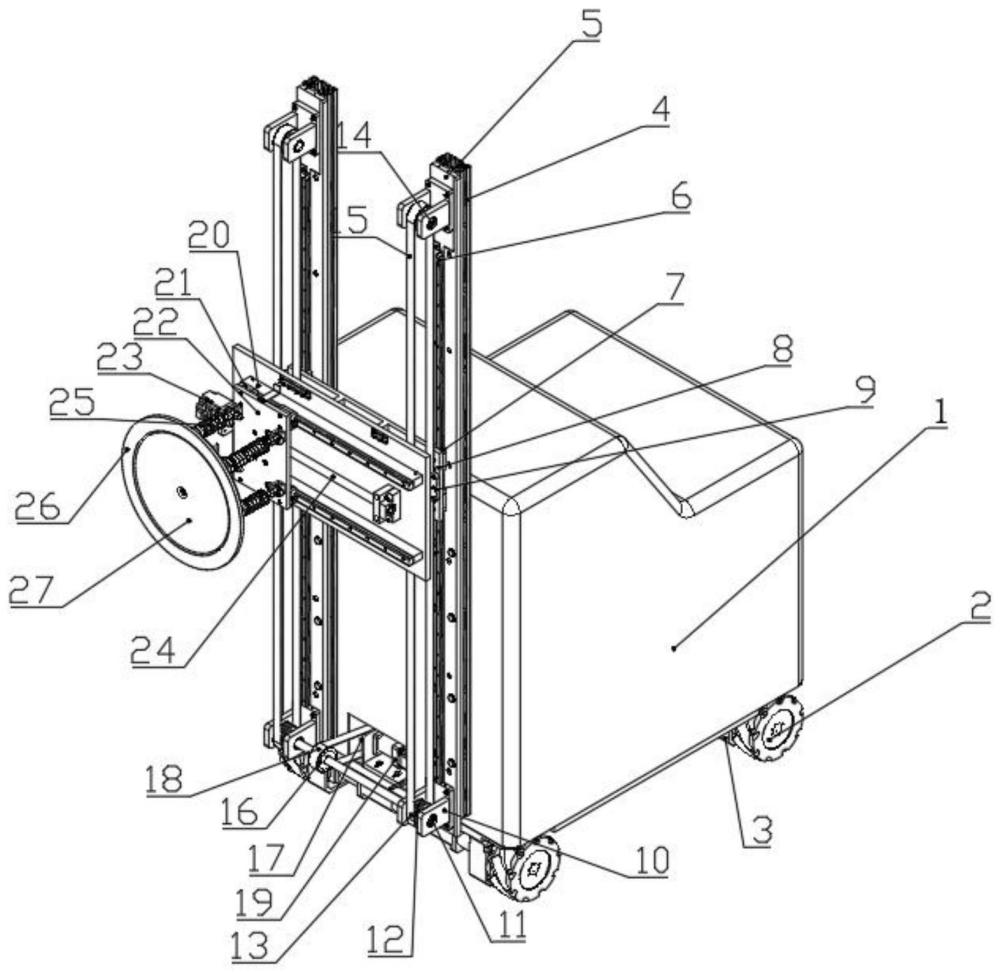
4、为实现以上目的,本发明通过以下技术方案予以实现:一种混凝土墙面打磨机器人,包括箱体,麦克纳姆轮,驱轮电机,铝材机座,导轨机座,导轨,滑块,平台,压块,齿轮底座,齿轮长轴,齿轮,传送带,齿轮短轴,传送带,从动齿轮,主动齿轮,驱动传送带,电机,水平导轨,水平滑块,小平台,丝杠电机,丝杠导轨,弹簧装配体,头部,磨盘,打磨电机,管道;
5、所述四个麦克纳姆轮分别固定在所述箱体底面的个边角处,每个所述麦克纳姆轮上固定一个所述驱轮电机;
6、所述两个铝材机座分别通过螺栓垂直固定在所述箱体前面的两侧;两个所述导轨机座分别通过螺栓固定在两个所述铝材机座上;两个所述导轨分别通过螺栓固定在两个所述导轨机座上,并保证每个所述导轨的上端与相对应的所述导轨机座的上端保持一定距离,每个所述导轨的下端与相对应的所述导轨机座的下端保持一定距离;每个所述导轨上安装两个所述滑块;
7、所述平台的后面板通过螺栓与四个所述滑块固连,并保证四个所述滑块固定在所述平台的后面板的个边角处;每个所述导轨机座的上下两侧分别固定一个所述齿轮底座;所述齿轮长轴穿过固定在所述导轨机座上面下侧的两个所述齿轮底座上的孔槽;两个所述齿轮安装在所述齿轮长轴上位于两个所述齿轮底座的位置上;
8、所述两个齿轮短轴穿过固定在所述导轨机座上面上侧的两个所述齿轮底座上的孔槽;两个所述齿轮分别安装在两个所述齿轮短轴上;所述传送带套在所述箱体右侧的所述导轨机座上的两个所述齿轮上;所述传送带套在所述箱体左侧的所述导轨机座上的两个所述齿轮上;两个所述压块分别将两条传送带靠近所述箱体的一边压在所述平台的后面板上,并使用螺栓固定在所述平台的后面板上;
9、所述电机固定在所述箱体的底面内部上;所述主动齿轮通过键固定在所述电机的输出轴上;
10、所述从动齿轮通过键固定在所述齿轮长轴上,并保证所述从动齿轮在位置上与所述主动齿轮相对应;所述驱动传送带套在所述从动齿轮和所述主动齿轮上;
11、所述两个水平导轨水平固定在所述平台的前面板的上下两侧;每个所述水平导轨上分别安装两个所述水平滑块;两个所述水平导轨上的四个所述水平滑块通过螺栓与所述小平台固连,并保证四个所述水平滑块位于所述小平台后面的四个边角处;所述丝杠导轨的两个机座通过螺栓水平固定在所述小平台上,并位于两个所述水平导轨中间;所述丝杠导轨的螺母座通过螺栓固定在所述小平台背面;所述丝杠导轨的螺母座固定在所述小平台的背面上;
12、所述丝杠电机通过螺栓固定在所述小平台上,并使电机的输出轴通过联轴器与所述丝杠导轨的丝杠固连;
13、所述四个弹簧装配体的两端分别于所述小平台和所述头部通过转动副相连;
14、所述打磨电机通过螺栓固连在所述头部背面中心,其输出轴穿过所述头部中心;所述磨盘与所述打磨电机的输出轴固连,并保证位于所述头部正面凹槽处;
15、所述管道的法兰端通过螺栓固定在所述头部背面边缘的孔槽处。
16、优选的,所述弹簧装配体由推进杆底座,减压弹簧下支撑块,弹簧,推进杆,减压弹簧中支撑块,压缩空间,上层连接件组成;
17、所述减压弹簧下支撑块的两端圆柱孔槽分别与所述推进杆底座和推进杆固连;
18、所述推进杆的另一端插入所述减压弹簧中支撑块和所述压缩空间内;所述弹簧套在所述压缩空间上,所述弹簧的两端分别与所述减压弹簧下支撑块和所述减压弹簧中支撑块固连,保证推进杆不会完全脱离压缩空间。
19、优选的,所述压缩空间另一端与所述上层连接件固连,固连凹槽处安装有一个上层支撑块。
20、优选的,所述减压弹簧中支撑块和压缩空间通过焊接固连,并使两者的中心孔槽同轴心。
21、优选的,所述推进杆与所述减压弹簧中支撑块之间通过所述中层减压垫、所述中层压紧块一以及所述中层压紧块二接触。
22、一种混凝土墙面打磨机器人及其使用方法,包括上述所述的混凝土墙面打磨机器人,具体操作如下:
23、当进行墙面打磨时,当进行墙面打磨时,四个麦克纳姆轮相互配合运动,带动整个装置运动到指定位置。然后电机转动通过键带动电机输出轴上的主动齿轮转动,主动齿轮和从动齿轮之间通过驱动传送带连接,主动齿轮转动从而可以带动从动齿轮转动,而从动齿轮通过键固定在齿轮长轴上,从而带动齿轮长轴在底部的两个齿轮底座上转动。左右两边的齿轮通过键固定在齿轮长轴上,齿轮长轴转动,其上的两个齿轮也跟着转动,从而带动左右两边的传送带移动。两个压块分别将两条传送带靠近箱体的一边压在平台的后面板上,传送带通过传送带与平台的后面板之间的摩擦力带动平台上下移动。同时丝杠电机开始转动,电机的输出轴通过联轴器与丝杠导轨的丝杠固连,两个水平导轨上的四个水平滑块通过螺栓与小平台固连,保证了小平台仅有左右移动一个自由度,因此电机转动带动丝杠导轨的丝杠转动,丝杠导轨的螺母座左右移动,螺母座与小平台固连,螺母座左右移动带动小平台左右移动。综合以上两个部分,通过控制电机和丝杠电机的正反转可以带动磨盘到达所需打磨墙面上的具体位置。然后四个麦克纳姆轮开始运动,保证磨盘紧贴墙面。接下来打磨电机开始转动,输出轴带动磨盘转动,依靠磨盘的粗糙表面与墙面之间的摩擦力完成打磨工作,打磨出来的废屑则可以通过安装在头部背面的管道排出。当遇到不平整表面时,四个弹簧装配体受到不同的挤压力,四个弹簧装配体收缩程度不同,可以实现头部以及磨盘的倾斜,从而完成复杂墙面的打磨工作。
24、(三)有益效果
25、本发明提供了一种混凝土墙面打磨机器人及其使用方法。具备以下有益效果:
26、该混凝土墙面打磨机器人及其使用方法,采用丝杠导轨升降机构与同步带轮升降机构带动打磨机构进行打磨,结构简单,传动过程稳定可靠,传动精度高,误差小,能够满足对高精度传动要求且抗过载能力强,同时采用麦克纳姆轮带动整个装置运动,可以实现全向移动,由较好的稳定性和可控性,控制简单,灵活且节省时间、空间。另外四个弹簧装配体可以使得磨盘有更好的适应性,能在不平整的墙面上进行工作。
技术特征:
1.一种混凝土墙面打磨机器人,其特征在于:包括箱体(1),麦克纳姆轮(2),驱轮电机(3),铝材机座(4),导轨机座(5),导轨(6),滑块(7),平台(8),压块(9),齿轮底座(10),齿轮长轴(11),齿轮(12),传送带(13),齿轮短轴(14),传送带(15),从动齿轮(16),主动齿轮(17),驱动传送带(18),电机(19),水平导轨(20),水平滑块(21),小平台(22),丝杠电机(23),丝杠导轨(24),弹簧装配体(25),头部(26),磨盘(27),打磨电机(28),管道(29);
2.根据权利要求1所述的一种混凝土墙面打磨机器人,其特征在于:所述弹簧装配体(25)由推进杆底座(30),减压弹簧下支撑块(31),弹簧(32),推进杆(33),减压弹簧中支撑块(36),压缩空间(38),上层连接件(40)组成;
3.根据权利要求2所述的一种混凝土墙面打磨机器人,其特征在于:所述压缩空间(38)另一端与所述上层连接件(40)固连,固连凹槽处安装有一个上层支撑块(39)。
4.根据权利要求2所述的一种混凝土墙面打磨机器人,其特征在于:所述减压弹簧中支撑块(36)和压缩空间(38)通过焊接固连,并使两者的中心孔槽同轴心。
5.根据权利要求2所述的一种混凝土墙面打磨机器人,其特征在于:所述推进杆(33)与所述减压弹簧中支撑块(36)之间通过所述中层减压垫(34)、所述中层压紧块一(35)以及所述中层压紧块二(37)接触。
6.一种混凝土墙面打磨机器人及其使用方法,其特征在于:包括权利要求1所述的混凝土墙面打磨机器人,具体操作如下:
技术总结
本发明公开了一种混凝土墙面打磨机器人及其使用方法,涉及工业制造技术领域。该混凝土墙面打磨机器人,包括箱体,麦克纳姆轮,驱轮电机,铝材机座,导轨机座,导轨,滑块,平台,压块,齿轮底座,齿轮长轴,齿轮,传送带,齿轮短轴。该混凝土墙面打磨机器人及其使用方法,采用丝杠导轨升降机构与同步带轮升降机构带动打磨机构进行打磨,结构简单,传动过程稳定可靠,传动精度高,误差小,能够满足对高精度传动要求且抗过载能力强,同时采用麦克纳姆轮带动整个装置运动,可以实现全向移动,由较好的稳定性和可控性,控制简单,灵活且节省时间、空间。另外四个弹簧装配体可以使得磨盘有更好的适应性,能在不平整的墙面上进行工作。
技术研发人员:郭建华,金仁才,高忠明,孔炯,胡义,谈莉斌
受保护的技术使用者:中国十七冶集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!