一种机器人生产加工用抛光机床
本发明涉及机器人零部件抛光,具体为一种机器人生产加工用抛光机床。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,而在机器人生产过程中,为了保证零件加工的精度以及为了方便对零件进行镀膜处理,需要对零件进行抛光处理,对此需要使用抛光机床进行抛光,在现有生活中一般通过抛光机进行抛光和人工手动拿取零件,实现零件的抛光。
2、虽然现有生活中的抛光机在一定程度上满足了使用者的使用需求,但在使用过程中仍存在一定的缺陷,具体问题如下,对零件抛光时,一般单面对零件进行抛光,导致了人员一个零件需要两次抛光,造成抛光效率低且人工劳动强度大的问题出现,且通过两次的单边抛光,抛光精度不易掌握,进而造成了抛光精度差的问题,且现有的抛光机需要对零件抛光,导致了无法连续的对多个零件抛光,进一步造成了零件抛光效率低的问题出现。
技术实现思路
1、本发明提供一种机器人生产加工用抛光机床,可以有效解决上述背景技术中提出的问题。
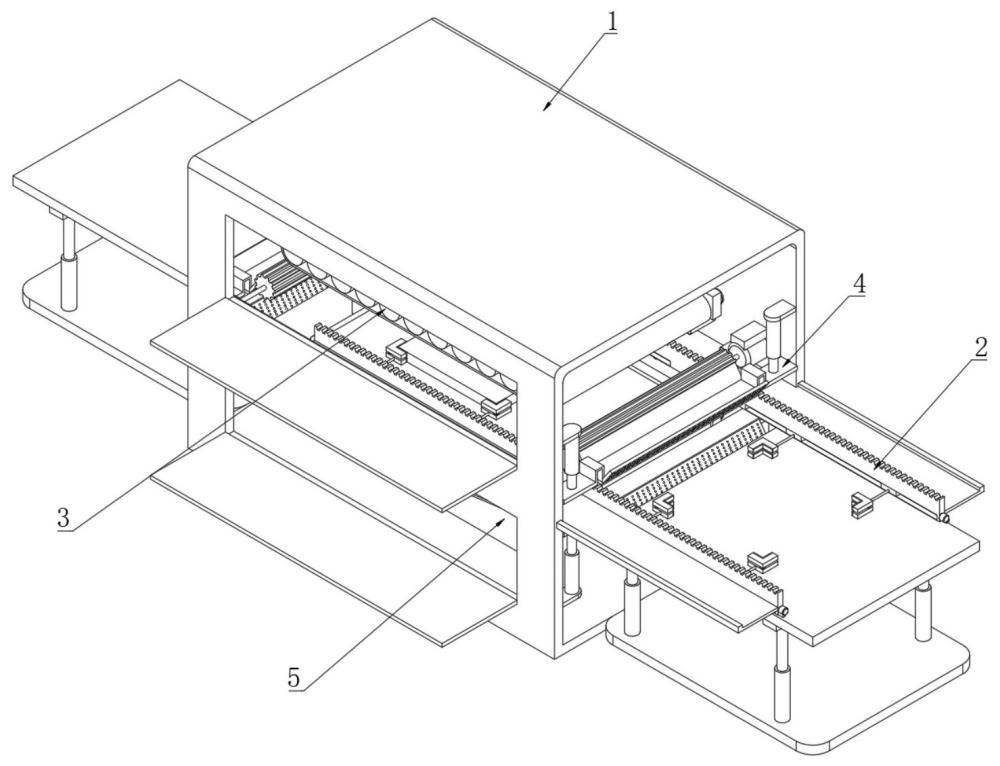
2、为实现上述目的,本发明提供如下技术方案:一种机器人生产加工用抛光机床,包括安装架,所述安装架内部安装有移动式夹持组件,所述移动式夹持组件包括滑板、第一夹持块和第二夹持块以及用于调节第一夹持块和第二夹持块的夹持电机、双向螺纹杆和夹持电动推杆和用于驱动滑板的齿杆、驱动电机和齿辊;
3、所述安装架内部安装有便拆式抛光组件,所述便拆式抛光组件包括抛光带以及用于调节固定抛光带的调节电动伸缩柱、抛光电机、带动辊、拉紧电动伸缩柱和拉紧辊;
4、所述安装架内部两端均安装有清理组件,所述清理组件包括清理棉以及用于驱动清理棉的弹簧伸缩柱和导向板。
5、优选的,所述安装架内部两端均滑动连接有滑板,所述滑板端部焊接有齿杆,所述安装架内部一端固定安装有驱动电机,所述安装架内部两端均转动连接有齿辊,所述齿杆两端均固定安装有夹持电机,所述夹持电机输出轴固定连接有双向螺纹杆,所述双向螺纹杆外侧两端均设置有夹持电动推杆,所述夹持电动推杆端部通过螺钉安装有第一夹持块,所述第一夹持块顶部设置有第二夹持块。
6、优选的,两个所述齿辊端部通过第一皮带连接机构相连接,所述双向螺纹杆外侧两端均通过螺纹连接有移动块,所述移动块内部通过螺钉安装有夹持电动推杆,所述第一夹持块内部通过螺钉安装有延长电动推杆,所述延长电动推杆端部通过螺钉安装有第二夹持块。
7、优选的,所述齿杆与齿辊啮合连接,所述齿杆对应移动块位置处开设有移动槽,且移动块的外侧与移动槽的内壁相互接触,所述第一夹持块和第二夹持块端面均粘接有橡胶板。
8、优选的,所述移动式夹持组件还包括安装板、支撑电动推杆、安装杆和支撑板;
9、所述安装架两端均焊接有安装板,所述安装板顶面四周均通过螺钉安装有支撑电动推杆,两个相邻所述支撑电动推杆顶部通过安装杆相连接,两个相邻所述安装杆顶部设置有支撑板。
10、优选的,所述安装架一端的安装杆数量为两个,所述支撑板与一个安装杆铰接连接,所述支撑板底面与另一个安装杆顶面相互接触。
11、优选的,所述安装架内部顶面和底面均通过螺钉安装有调节电动伸缩柱,所述调节电动伸缩柱端部通过移动杆相连接,所述移动杆端部固定安装有抛光电机,所述移动杆端部设置有带动辊,所述移动杆内部中部通过螺钉安装有拉紧电动伸缩柱,所述拉紧电动伸缩柱顶部设置有拉紧辊,所述带动辊和拉紧辊组合后外侧设置有抛光带。
12、优选的,所述安装架端面对应抛光带位置处开设有拿取孔,且拿取孔底部铰接有透明封闭门。
13、优选的,所述安装架内部两侧两端均通过螺钉安装有弹簧伸缩柱,两个相邻所述弹簧伸缩柱底部设置有清理棉所述清理棉端部设置有导向板。
14、优选的,所述导向板的纵截面为倾斜状,所述安装架一端的导向板数量为四个,四个所述导向板两两分布于清理棉两端位置。
15、与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便:可以对不同大小的零件进行夹持,进而可以对不同大小的零件抛光,且通过夹持电动推杆和夹持块的螺杆连接,便于更换不同形状的夹持块,以便于夹持不同形状的零件,通过夹持块与扩大抛光机床的适用范围,同时可以进行零件上下同时抛光,一方面可以达到快速抛光的目的,提高抛光的效率以及降低人员的劳动强度,另一方面可以提高零件抛光的精度,提高零件抛光的效果;
16、且可以连续对零件抛光,实现一个零件抛光,另一个零件卸料,进而可以加快零件抛光的效率,且在抛光过程中,通过两个方向上的支撑辊对零件夹持,保证零件在抛光过程中的稳定性,进一步提高零件抛光的精准性和效果,在抛光结束后可以对零件进行支撑,进而便于零件的卸料,避免零件卸料时出现损伤的问题,同时通过可转动式的支撑板,便于较重零件上料和卸料,降低人力资源的损耗;
17、同时可以抛光前后对零件表面清理,便于人员对抛光前后的零件观察,使得人员观看效果更佳,减少抛光残次品的产生,且无需人工清理,降低人工的劳动强度,在抛光过程中进行吸尘处理,避免灰尘四溅,对抛光机床周围环境造成影响的问题出现。
技术特征:
1.一种机器人生产加工用抛光机床,包括安装架(1),其特征在于:所述安装架(1)内部安装有移动式夹持组件(2),所述移动式夹持组件(2)包括滑板(201)、第一夹持块(209)和第二夹持块(211)以及用于调节第一夹持块(209)和第二夹持块(211)的夹持电机(206)、双向螺纹杆(207)和夹持电动推杆(208)和用于驱动滑板(201)的齿杆(202)、驱动电机(203)和齿辊(204);
2.根据权利要求1所述的一种机器人生产加工用抛光机床,其特征在于,所述安装架(1)内部两端均滑动连接有滑板(201),所述滑板(201)端部焊接有齿杆(202),所述安装架(1)内部一端固定安装有驱动电机(203),所述安装架(1)内部两端均转动连接有齿辊(204),所述齿杆(202)两端均固定安装有夹持电机(206),所述夹持电机(206)输出轴固定连接有双向螺纹杆(207),所述双向螺纹杆(207)外侧两端均设置有夹持电动推杆(208),所述夹持电动推杆(208)端部通过螺钉安装有第一夹持块(209),所述第一夹持块(209)顶部设置有第二夹持块(211)。
3.根据权利要求2所述的一种机器人生产加工用抛光机床,其特征在于,两个所述齿辊(204)端部通过第一皮带连接机构(205)相连接,所述双向螺纹杆(207)外侧两端均通过螺纹连接有移动块(216),所述移动块(216)内部通过螺钉安装有夹持电动推杆(208),所述第一夹持块(209)内部通过螺钉安装有延长电动推杆(210),所述延长电动推杆(210)端部通过螺钉安装有第二夹持块(211)。
4.根据权利要求2所述的一种机器人生产加工用抛光机床,其特征在于,所述齿杆(202)与齿辊(204)啮合连接,所述齿杆(202)对应移动块(216)位置处开设有移动槽,且移动块(216)的外侧与移动槽的内壁相互接触,所述第一夹持块(209)和第二夹持块(211)端面均粘接有橡胶板。
5.根据权利要求1所述的一种机器人生产加工用抛光机床,其特征在于,所述移动式夹持组件(2)还包括安装板(212)、支撑电动推杆(213)、安装杆(214)和支撑板(215);
6.根据权利要求5所述的一种机器人生产加工用抛光机床,其特征在于,所述安装架(1)一端的安装杆(214)数量为两个,所述支撑板(215)与一个安装杆(214)铰接连接,所述支撑板(215)底面与另一个安装杆(214)顶面相互接触。
7.根据权利要求1所述的一种机器人生产加工用抛光机床,其特征在于,所述安装架(1)内部顶面和底面均通过螺钉安装有调节电动伸缩柱(301),所述调节电动伸缩柱(301)端部通过移动杆(302)相连接,所述移动杆(302)端部固定安装有抛光电机(303),所述移动杆(302)端部设置有带动辊(305),所述移动杆(302)内部中部通过螺钉安装有拉紧电动伸缩柱(306),所述拉紧电动伸缩柱(306)顶部设置有拉紧辊(308),所述带动辊(305)和拉紧辊(308)组合后外侧设置有抛光带(309)。
8.根据权利要求7所述的一种机器人生产加工用抛光机床,其特征在于,所述安装架(1)端面对应抛光带(309)位置处开设有拿取孔,且拿取孔底部铰接有透明封闭门。
9.根据权利要求1所述的一种机器人生产加工用抛光机床,其特征在于,所述安装架(1)内部两侧两端均通过螺钉安装有弹簧伸缩柱(401),两个相邻所述弹簧伸缩柱(401)底部设置有清理棉(404)所述清理棉(404)端部设置有导向板(405)。
10.根据权利要求9所述的一种机器人生产加工用抛光机床,其特征在于,所述导向板(405)的纵截面为倾斜状,所述安装架(1)一端的导向板(405)数量为四个,四个所述导向板(405)两两分布于清理棉(404)两端位置。
技术总结
本发明公开了一种机器人生产加工用抛光机床,包括安装架,所述安装架内部安装有移动式夹持组件,所述移动式夹持组件包括滑板、第一夹持块和第二夹持块以及用于调节第一夹持块和第二夹持块的夹持电机、双向螺纹杆和夹持电动推杆和用于驱动滑板的齿杆、驱动电机和齿辊,与现有技术相比,本发明的有益效果,可以对不同大小的零件进行夹持,进而可以对不同大小的零件抛光,且通过夹持电动推杆和夹持块的螺杆连接,便于更换不同形状的夹持块,以便于夹持不同形状的零件,通过夹持块与扩大抛光机床的适用范围,同时可以进行零件上下同时抛光,一方面可以达到快速抛光的目的,提高抛光的效率以及降低人员的劳动强度。
技术研发人员:陈揆能,王建春,陈蓓,扶敏摇
受保护的技术使用者:湖南理工职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!