一种汽车行业非标独立打磨系统的制作方法
本发明涉及汽车制造,具体为一种汽车行业非标独立打磨系统。
背景技术:
1、现阶段,汽车在使用过程中损坏了以后都是送到修理厂为第一选择,在修理厂中的修理工艺大致分为以下几点:
2、1、如是车型外观板件变形,大多是利用工具将钣金面修复,如遇特殊面、外观面是没有办法修复到新车状态,专业上也可以叫光顺状态。
3、2、利用腻子,通常状态下为泥状,师傅们将腻子均匀的涂抹在修复面上,涂抹适量的固化剂,等待干燥,进而达到修复目的。
4、3、利用人工手动打磨头,依据要修复的状态,将修复面尽量达到光顺状态。
5、4、最后进行喷漆完成修复全过程。
6、其中,人工手动打磨,腻子粉颗粒小,在工人佩戴防护用品的时候和人工打磨除尘设备,多少都会吸引人体肺部,长期执行本工作,会引起肺部疾病,引起这一项的关键原因就是人和腻子修复面工作的时候会直接产生结果。
7、因此,我们提出一种汽车行业非标独立打磨系统,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的在于提供一种汽车行业非标独立打磨系统,以解决上述背景技术中提出的问题。
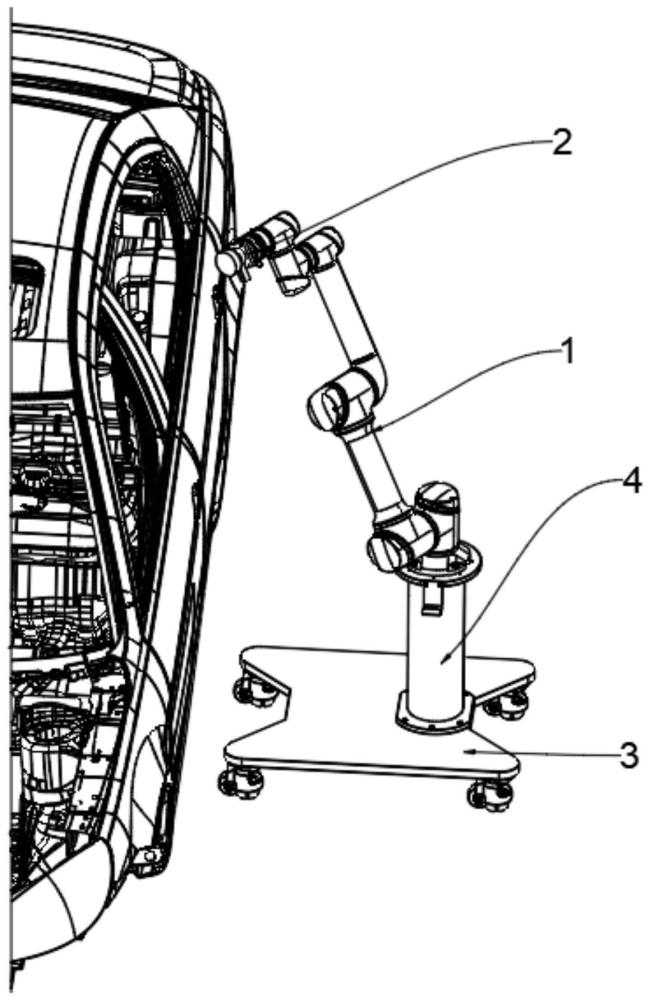
2、为实现上述目的,本发明提供如下技术方案:一种汽车行业非标独立打磨系统,包括:协作机器人,所述协作机器人的活动机器臂前端设置打磨模块;
3、所述打磨模块包含力控传感器,力控传感器前端设置打磨连接板,打磨连接板上安装浮动打磨头。
4、优选的,所述浮动打磨头为气动打磨头。
5、优选的,所述协作机器人底部设有可移动托盘车。
6、优选的,所述协作机器人与可移动托盘车之间设有机器人底座。
7、优选的,所述力控传感器设置在力控传感器连接板上。
8、与现有技术相比,本发明的有益效果是:
9、1、利用机器人运行打磨模块,进行非标打磨,减轻人的工作量,得到更好的修复面质量;
10、2、让人和腻子粉做隔离,利用力控传感器完成恒力打磨和垂直于修复面的准确打磨。
技术特征:
1.一种汽车行业非标独立打磨系统,包括:协作机器人(1),其特征在于:所述协作机器人(1)的活动机器臂前端设置打磨模块(2);
2.根据权利要求1所述的一种汽车行业非标独立打磨系统,其特征在于,所述浮动打磨头(24)为气动打磨头,浮动打磨头(24)连接气源。
3.根据权利要求1所述的一种汽车行业非标独立打磨系统,其特征在于,所述协作机器人(1)底部设有可移动托盘车(3)。
4.根据权利要求4所述的一种汽车行业非标独立打磨系统,其特征在于,所述协作机器人(1)与可移动托盘车(3)之间设有机器人底座(4)。
5.根据权利要求1所述的一种汽车行业非标独立打磨系统,其特征在于,所述力控传感器(22)设置在力控传感器连接板(21)上。
6.一种根据权利要求1所述的一种汽车行业非标独立打磨系统,其特征在于,所述的打磨系统工作原理为:协作机器人(1)拖动轨迹的功能完成非标打磨的大概轨迹,整个打磨系统通过可移动托盘车(3)人工移动到需要的位置,将能源接好,需要打磨的车开到合适的位置,满足协作机器人(1)打磨臂展要求,手动模拟轨迹,记录轨迹,用协作机器人(1)的拖动轨迹的能力带动打磨模块(2)运动,气动打磨头开始通气工作,实现循环,按照协作机器人(1)拖动的轨迹进行复制上述的轨迹,其中力控传感器(22)开始工作,始终保持5牛的力,始终保持垂直于接触面复制轨迹,这样就可以完成拖动轨迹的打磨任务。
技术总结
本发明公开了一种汽车行业非标独立打磨系统,包括:协作机器人,所述协作机器人的活动机器臂前端设置打磨模块,所述打磨模块包含力控传感器,力控传感器前端设置打磨连接板,打磨连接板上安装浮动打磨头。本发明利用机器人运行打磨模块,进行非标打磨,减轻人的工作量,得到更好的修复面质量;让人和腻子粉做隔离,利用力控传感器完成恒力打磨和垂直于修复面的准确打磨。
技术研发人员:王坤,王晋国,丛丽新
受保护的技术使用者:上海磐沛自动化技术有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!