一种方形柔性恒力力控打磨机构的制作方法
本技术涉及工件打磨,具体为一种方形柔性恒力力控打磨机构。
背景技术:
1、在工件生产的过程中,在金属工件的加工过程中会出现倒刺以及毛边等情况,为了避免出现工件质检不合格、无法使用的情况,因此需要在工件生产完成后使用打磨机构对工件进行打磨加工;
2、通过打磨机构能够将工件表面倒刺以及毛边的部位进行打磨平整,能够提高工件的质检合格率,但是目前市场上的打磨机构还是存在以下的问题:
3、1、现有的打磨机构,要求打磨装置和打磨工具沿着被打磨工件外轮廓打磨,在工件批量打磨的时候,由于每个工件没有办法做到外形尺寸或者位置一致,所以就很难实现打磨一致性的批量自动化打磨生产;
4、2、常规的打磨机构,当打磨工具和工件打磨接触的时候,打磨力不稳定,会一直在改变,这样就没有办法实现打磨一致性和稳定性,同时打磨工具和工件开始打磨接触的一瞬间,由于打磨工具不具备柔性或者控制力度的功能,极易造成打磨工具对工件表面的过度打磨甚至打磨损坏。
5、针对上述问题,在原有的打磨机构的基础上进行创新设计。
技术实现思路
1、本实用新型的目的在于提供一种方形柔性恒力力控打磨机构,以解决上述背景技术中提出的目前市场上常见的打磨机构,要求打磨装置和打磨工具沿着被打磨工件外轮廓打磨,在工件批量打磨的时候,由于每个工件没有办法做到外形尺寸或者位置一致,所以就很难实现打磨一致性的批量自动化打磨生产,且当打磨工具和工件打磨接触的时候,打磨力不稳定,会一直在改变,这样就没有办法实现打磨一致性和稳定性,同时打磨工具和工件开始打磨接触的一瞬间,由于打磨工具不具备柔性或者控制力度的功能,极易造成打磨工具对工件表面的过度打磨甚至打磨损坏的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种方形柔性恒力力控打磨机构,包括壳体、浮动接头、气体比例阀、气缸、换向电磁阀、电路控制板、姿态传感器、距离传感器、控制系统和打磨器,所述壳体的上端设置有滑块,且滑块安装在滑轨上,并且滑块上面安装固定有移动板,所述气缸通过前后两个第一支架固定在壳体上,且气缸的伸缩推杆前端通过浮动接头与移动板固定连接,所述移动板的前端安装固定有测距板,且移动板的上端安装有打磨器,所述气体比例阀、换向电磁阀、电路控制板、姿态传感器和距离传感器分别固定在壳体上,且距离传感器安装在第二支架上,所述控制系统包括控制单元和人机交互界面。
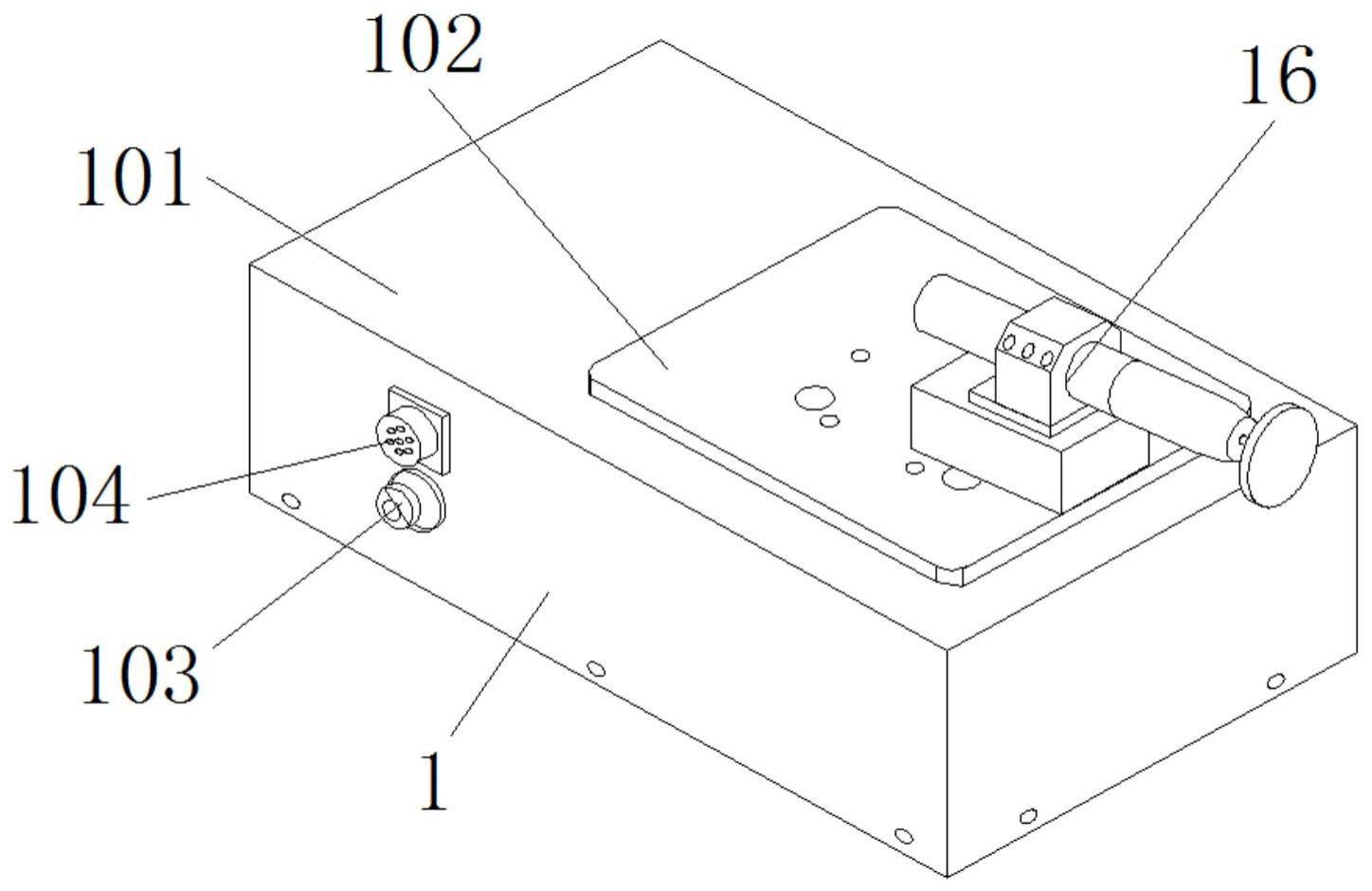
3、优选的,所述壳体包括防护罩、移动连接板、气管接头和电缆接头,且移动连接板安装固定在移动连接板上面,所述防护罩侧面安装有气管接头和电缆接头,所述打磨器固定安装在移动连接板的上端。
4、优选的,所述打磨器通过螺栓在移动连接板的上端固定安装。
5、优选的,所述打磨器包括执行器、电机和砂轮片,且电机固定设置于执行器的一侧,并且砂轮片与电机的输出轴固定相连。
6、与现有技术相比,本实用新型的有益效果是:该方形柔性恒力力控打磨机构,
7、1、开始打磨时,姿态传感器,距离传感器可实时检测当前机构的位置和姿态,并时时将以上信息和数据反馈至控制系统,控制系统在通过力控算法实时输出控制信号,控制信号用于控制气体比例阀的压强,进而精准控制气缸的输出力,带动移动板、移动连接板和打磨器轴向浮动,从而控制打磨器和工件之间接触力和打磨力是精准恒定的力;
8、2、控制系统可以和执行器互联互通,通过人机交互界面设定了接触力和接触力过渡时间这两个参数,当方形柔性恒力力控打磨机构开始携带打磨器和工件打磨的一瞬间,接触力根据需求设定一个很小的力,同时从接触力过渡到正常打磨力的过渡时间也可以根据需求任意设定,这样就解决了打磨器和工件开始打磨接触的一瞬间极易造成打磨器对工件表面的过度打磨甚至打磨损坏的问题。
技术特征:
1.一种方形柔性恒力力控打磨机构,包括壳体(1)、浮动接头(3)、气体比例阀(4)、气缸(5)、换向电磁阀(7)、电路控制板(8)、姿态传感器(9)、距离传感器(10)、控制系统(15)和打磨器(16),其特征在于:所述壳体(1)的上端设置有滑块(2),且滑块(2)安装在滑轨(14)上,并且滑块(2)上面安装固定有移动板(13),所述气缸(5)通过前后两个第一支架(6)固定在壳体(1)上,且气缸(5)的伸缩推杆前端通过浮动接头(3)与移动板(13)固定连接,所述移动板(13)的前端安装固定有测距板(12),且移动板(13)的上端安装有打磨器(16),所述气体比例阀(4)、换向电磁阀(7)、电路控制板(8)、姿态传感器(9)和距离传感器(10)分别固定在壳体(1)上,且距离传感器(10)安装在第二支架(11)上,所述控制系统(15)包括控制单元(1501)和人机交互界面(1502)。
2.根据权利要求1所述的一种方形柔性恒力力控打磨机构,其特征在于:所述壳体(1)包括防护罩(101)、移动连接板(102)、气管接头(103)和电缆接头(104),且移动连接板(102)安装固定在移动板(13)上面,所述防护罩(101)侧面安装有气管接头(103)和电缆接头(104),所述打磨器(16)固定安装在移动连接板(102)的上端。
3.根据权利要求2所述的一种方形柔性恒力力控打磨机构,其特征在于:所述打磨器(16)通过螺栓在移动连接板(102)的上端固定安装。
4.根据权利要求3所述的一种方形柔性恒力力控打磨机构,其特征在于:所述打磨器(16)包括执行器(1601)、电机(1602)和砂轮片(1603),且电机(1602)固定设置于执行器(1601)的一侧,并且砂轮片(1603)与电机(1602)的输出轴固定相连。
技术总结
本技术公开了一种方形柔性恒力力控打磨机构,包括壳体、浮动接头、气体比例阀、气缸、换向电磁阀、电路控制板、姿态传感器、距离传感器、控制系统和打磨器,所述壳体的上端设置有滑块,所述气缸通过前后两个第一支架固定在壳体上,所述移动板的前端安装固定有测距板。该方形柔性恒力力控打磨机构,开始打磨时,姿态传感器,距离传感器可实时检测当前机构的位置和姿态,并时时将以上信息和数据反馈至控制系统,控制系统在通过力控算法实时输出控制信号,控制信号用于控制气体比例阀的压强,进而精准控制气缸的输出力,带动移动板、移动连接板和打磨器轴向浮动,从而控制打磨器和工件之间接触力和打磨力是精准恒定的力。
技术研发人员:洪定生
受保护的技术使用者:北京斯蒂尔数控科技有限公司
技术研发日:20230314
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!