可自动更换磨盘的机器人末端柔性偏心磨抛设备的制作方法
本技术涉及磨抛,具体为可自动更换磨盘的机器人末端柔性偏心磨抛设备。
背景技术:
1、在汽车、高铁与航空航天等制造领域,普遍需对喷涂后零部件进行抛光。当前依靠人工手工进行零部件进行抛光,人工工作环境恶劣,工作中抛光产生的粉尘容易对工人身体造成损害。其次,人工抛光很难保证抛光质量与成品一致性。
2、也有部分应用采用了专机或机器人抛光,抛光工具主要采用人工使用气动偏心抛光机,气动偏心抛光机因气压不稳定容易产生转速偏差,从而难以保证产品一致性。其次当前用于专机或机器人末端的气动偏心抛光机普遍功率较小,容易出现失速情况,导致抛光质量不合格,往往需要人工进行质检修抛。
3、当前市面上也有适用于机器人末端的电动偏心抛光设备,但普遍采用电机驱动方式,磨盘偏心量与尺寸固定,在汽车、高铁与航空航天等制造领域,零部件普遍为曲面,且大多为变曲率。从而导致在使用机器人抛光时需使用不同偏心量与不同磨盘尺寸抛光工具,当前工具很难实现这一需求,从而导致喷涂后曲面工件难以使用机器人进行抛光。
技术实现思路
1、本实用新型的目的在于提供可自动更换磨盘的机器人末端柔性偏心磨抛设备,以解决上述背景技术中提出的问题。
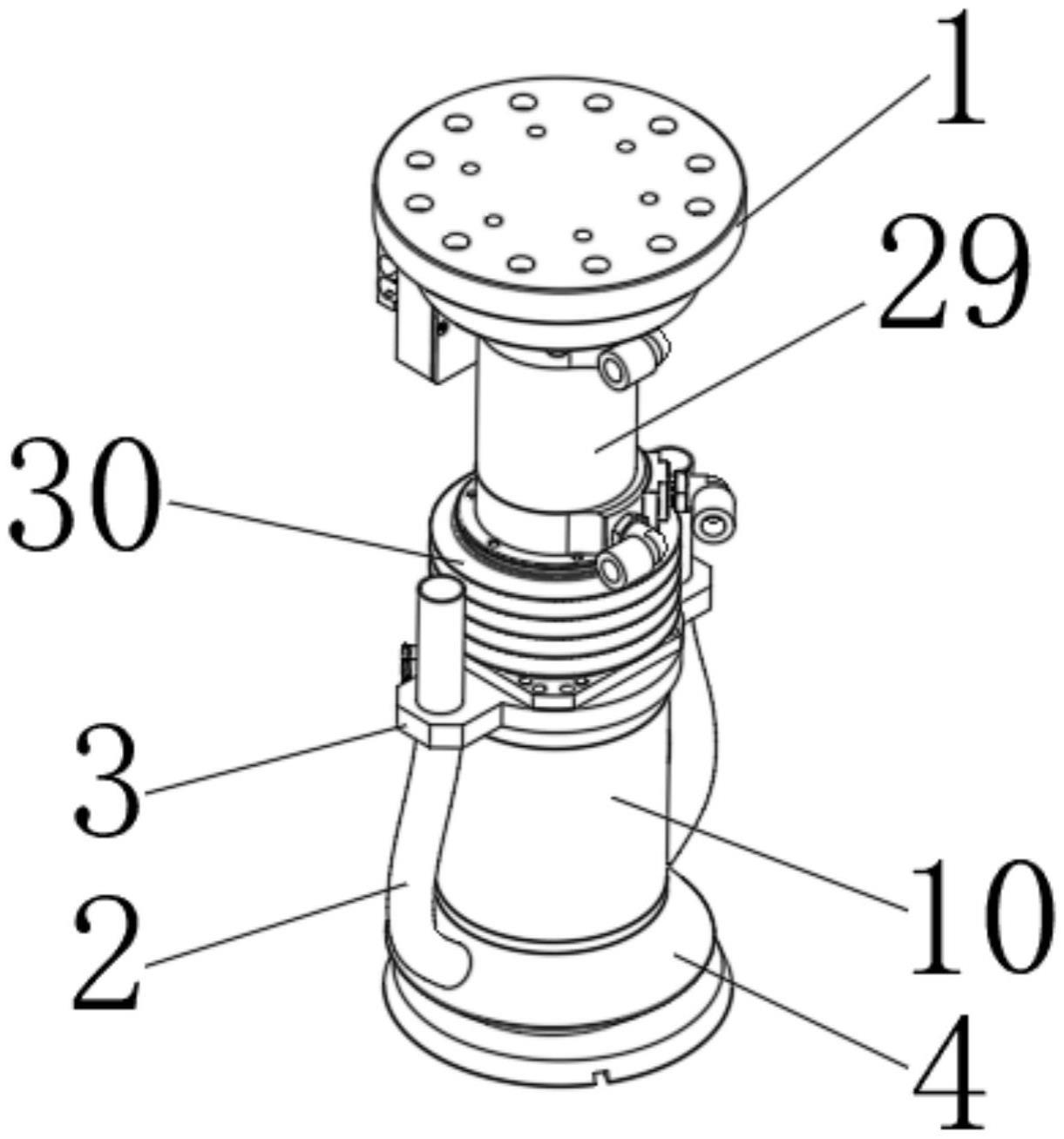
2、为实现上述目的,本实用新型提供如下技术方案:可自动更换磨盘的机器人末端柔性偏心磨抛设备,包括柔性力控组件、小型自动换刀主轴和偏心磨抛刀柄,所述柔性力控组件的底部设有小型自动换刀主轴,所述小型自动换刀主轴的底部设有偏心磨抛刀柄,所述偏心磨抛刀柄外侧设有除尘设备组件,所述柔性力控组件包括法兰和连接管,所述法兰的底部固定连接有连接管,所述连接管的底部固定连接有伸缩杆,所述除尘设备组件包括伸缩杆和除尘风琴罩,所述伸缩杆的底部固定连接有安装板,所述小型自动换刀主轴包括壳体、永磁体、线圈和中心转轴,所述安装板的底部安装有后盖板,所述后盖板的底部固定连接有壳体,所述壳体底部固定连接有前盖板,所述壳体内壁的两端分别设有后轴承和前轴承,所述后轴承位于靠近后盖板的一端,所述壳体的内壁且位于前轴承与后轴承之间设有永磁体,所述后轴承的内圈与前轴承内圈之间设有中心转轴,所述壳体的外侧套设有线圈。
3、作为优选,所述中心转轴的内部设有滑动腔和复位腔,所述中心转轴的内部滑动连接有拉杆轴,所述拉杆轴依次贯穿滑动腔和复位腔,所述拉杆轴的外侧固定连接有伸缩推块,所述中心转轴的内部设有与伸缩推块配合使用的滑动腔,所述拉杆轴的外侧且位于滑动腔内部从右往左依次套设有弹簧档块、弹簧、弹簧套筒和拉爪。
4、作为优选,所述中心转轴靠近拉爪的一端固定连接有限位柱,所述限位柱的两端均设有与拉爪配合使用的倒角。
5、作为优选,所述偏心磨抛刀柄包括刀柄轴和凹槽,所述中心转轴通过拉爪卡接有刀柄轴,所述刀柄轴一端设有连接槽孔,所述连接槽孔的内部设有与拉爪互锁的凹槽。
6、作为优选,所述壳体的底部固定连接有除尘风琴罩,所述除尘风琴罩的顶部连接有除尘管,所述除尘管贯穿安装板且与安装板固定连接。
7、作为优选,所述壳体顶部侧一侧固定连接有电源控制接口。
8、作为优选,所述后盖板的一侧设有冷却进气口。
9、作为优选,所述后盖板一侧设有拉刀进气口和松刀进气口,所述冷却进气口位于拉刀进气口与松刀进气口之间。
10、与现有技术相比,本实用新型的有益效果是:可以实现机器人抛光转速精准控制,可以防止失速,从而实现抛光工艺精准控制;机器人可以实现抛光法向力的精准控制,通过柔性力控伸缩,可以自动贴合工件,克服工件来料不一致与装夹误差的扰动;机器人可以自动更换末端磨盘,根据工件不同曲率自动选取不同尺寸规格磨盘,实现磨盘与工件贴合,保证抛光质量;机器人可以自动更换不同偏心量磨盘,根据抛光工件抛光工艺及效率需求,机器人可以自动更换不同偏心量磨盘刀柄,从而在保证质量前提下提升抛光效率;机器人可以实现在更换磨盘情况下保证除尘,保证现场工作环境的干净整洁;配合自动换砂纸设备,机器人可以实现偏心多孔砂纸的自动更换。
技术特征:
1.可自动更换磨盘的机器人末端柔性偏心磨抛设备,包括柔性力控组件(25)、小型自动换刀主轴(26)和偏心磨抛刀柄(28),其特征在于:所述柔性力控组件(25)的底部设有小型自动换刀主轴(26),所述小型自动换刀主轴(26)的底部设有偏心磨抛刀柄(28),所述偏心磨抛刀柄(28)外侧设有除尘设备组件(27),所述柔性力控组件(25)包括法兰(1)和连接管(29),所述法兰(1)的底部固定连接有连接管(29),所述连接管(29)的底部固定连接有伸缩杆(30),所述除尘设备组件(27)包括伸缩杆(30)和除尘风琴罩(4),所述伸缩杆(30)的底部固定连接有安装板(3),所述小型自动换刀主轴(26)包括壳体(10)、永磁体(12)、线圈(13)和中心转轴(17),所述安装板(3)的底部安装有后盖板(15),所述后盖板(15)的底部固定连接有壳体(10),所述壳体(10)底部固定连接有前盖板(9),所述壳体(10)内壁的两端分别设有后轴承(14)和前轴承(11),所述后轴承(14)位于靠近后盖板(15)的一端,所述壳体(10)的内壁且位于前轴承(11)与后轴承(14)之间设有永磁体(12),所述后轴承(14)的内圈与前轴承(11)内圈之间设有中心转轴(17),所述壳体(10)的外侧套设有线圈(13)。
2.根据权利要求1所述的可自动更换磨盘的机器人末端柔性偏心磨抛设备,其特征在于:所述中心转轴(17)的内部设有滑动腔(31)和复位腔(32),所述中心转轴(17)的内部滑动连接有拉杆轴(22),所述拉杆轴(22)依次贯穿滑动腔(31)和复位腔(32),所述拉杆轴(22)的外侧固定连接有伸缩推块(16),所述中心转轴(17)的内部设有与伸缩推块(16)配合使用的滑动腔(31),所述拉杆轴(22)的外侧且位于滑动腔(31)内部从右往左依次套设有弹簧档块(18)、弹簧(19)、弹簧套筒(20)和拉爪(21)。
3.根据权利要求1所述的可自动更换磨盘的机器人末端柔性偏心磨抛设备,其特征在于:所述中心转轴(17)靠近拉爪(21)的一端固定连接有限位柱,所述限位柱的两端均设有与拉爪(21)配合使用的倒角。
4.根据权利要求1所述的可自动更换磨盘的机器人末端柔性偏心磨抛设备,其特征在于:所述偏心磨抛刀柄(28)包括刀柄轴(23)和凹槽(24),所述中心转轴(17)通过拉爪(21)卡接有刀柄轴(23),所述刀柄轴(23)一端设有连接槽孔,所述连接槽孔的内部设有与拉爪(21)互锁的凹槽(24)。
5.根据权利要求1所述的可自动更换磨盘的机器人末端柔性偏心磨抛设备,其特征在于:所述壳体(10)的底部固定连接有除尘风琴罩(4),所述除尘风琴罩(4)的顶部连接有除尘管(2),所述除尘管(2)贯穿安装板(3)且与安装板(3)固定连接。
6.根据权利要求1所述的可自动更换磨盘的机器人末端柔性偏心磨抛设备,其特征在于:所述壳体(10)顶部侧一侧固定连接有电源控制接口(5)。
7.根据权利要求1所述的可自动更换磨盘的机器人末端柔性偏心磨抛设备,其特征在于:所述后盖板(15)的一侧设有冷却进气口(7)。
8.根据权利要求7所述的可自动更换磨盘的机器人末端柔性偏心磨抛设备,其特征在于:所述后盖板(15)一侧设有拉刀进气口(6)和松刀进气口(8),所述冷却进气口(7)位于拉刀进气口(6)与松刀进气口(8)之间。
技术总结
本技术公开了可自动更换磨盘的机器人末端柔性偏心磨抛设备,包括柔性力控组件、小型自动换刀主轴和偏心磨抛刀柄,所述柔性力控组件的底部设有小型自动换刀主轴,所述小型自动换刀主轴的底部设有偏心磨抛刀柄,所述偏心磨抛刀柄外侧设有除尘设备组件,所述柔性力控组件包括法兰和连接管,本技术的有益效果是:可以实现机器人抛光转速精准控制,可以防止失速,从而实现抛光工艺精准控制;机器人可以实现抛光法向力的精准控制,通过柔性力控伸缩,可以自动贴合工件,克服工件来料不一致与装夹误差的扰动;机器人可以自动更换末端磨盘,根据工件不同曲率自动选取不同尺寸规格磨盘,实现磨盘与工件贴合,保证抛光质量。
技术研发人员:胡小龙
受保护的技术使用者:砾合(上海)科技有限公司
技术研发日:20230406
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!