一种多功能抓手及机器人的制作方法
本技术涉及机器人,具体涉及一种多功能抓手及机器人。
背景技术:
1、铸造工件出模后有时需要进行打磨加工,打磨是指借助打磨工具等设备对表面粗糙度进行改变的一种加工方法。而打磨工具随着使用次数的增加,磨损也会越来越大,故而时常需要对打磨工具进行更换。
2、现有的打磨设备有些是通过在机器人上安装打磨工具,如刀具,将多把刀具存放于刀库中,机器人能够在刀库进行自动换刀,并在固定位置将工件固定,通过机器人带动打磨工具移动来对工件进行打磨。但将工件固定往往存在打磨盲区,如人工将工件取出换向后再安装,则影响工件的打磨效率。
3、另外,打磨设备中也有些是通过机器人去抓取工件,安装有打磨工具(刀具)的打磨设备设置在固定位置,通过机器人将工件移动至打磨设备处进行打磨。采用机器人抓取工件进行打磨的方式时,由于机器人的抓手功能单一,且抓手已经设置成适配工件的抓取,因此不适配打磨工具的抓取,当刀具产生磨损时,只能是通过人工对磨损的刀具进行更换,非常影响工件的打磨效率。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点和不足,本实用新型提供一种多功能抓手及机器人,其解决了现有机器人的抓手功能单一而影响打磨效率的技术问题。
3、(二)技术方案
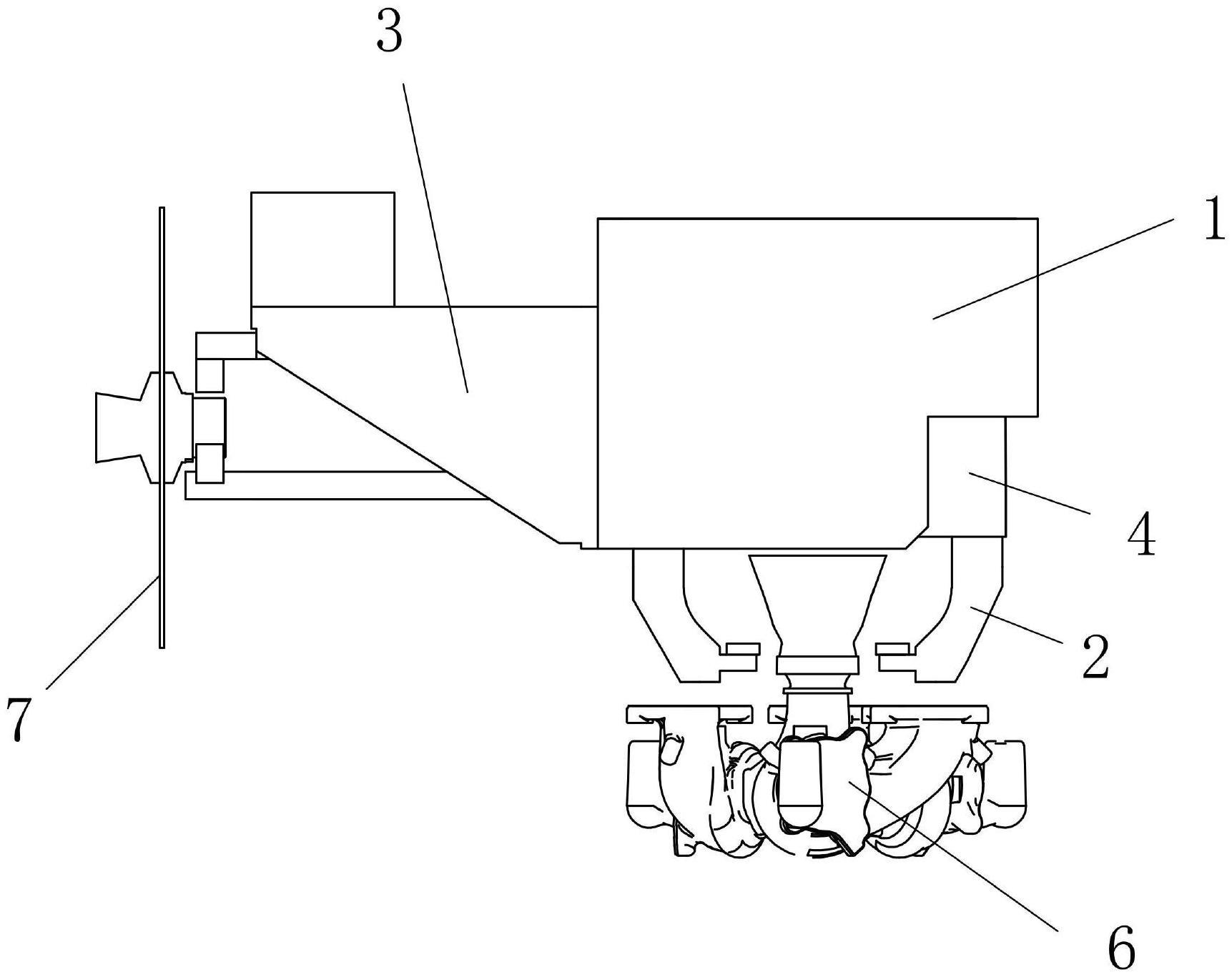
4、为了达到上述目的,本实用新型的多功能抓手包括:
5、连接件;
6、刀具抓取机构,所述刀具抓取机构与所述连接件连接;
7、工件抓取机构,所述工件抓取机构包括多个夹爪、多个滑移组件和多个卡接件,多个所述滑移组件与所述连接件滑动连接;多个所述卡接件与多个所述滑移组件一一对应地滑动连接,并与多个所述夹爪一一对应地可拆卸连接;
8、其中,所述夹爪与所述滑移组件啮合锁紧;所述夹爪与所述滑移组件分离且与所述卡接件半拆卸时,所述夹爪能够与所述卡接件在所述滑移组件上同步滑动。
9、可选地,所述滑移组件包括滑动件和驱动器;
10、所述驱动器设置于所述连接件上,所述驱动器能够驱动所述滑动件相对于所述连接件滑动;
11、所述卡接件与所述滑动件滑动连接,并与所述夹爪啮合锁紧。
12、可选地,多个所述滑动件绕所述连接件的轴向均匀设置,且所述连接件的轴线与多个所述滑动件的几何中心的连线的距离均相等。
13、可选地,所述滑动件上开设有燕尾槽,所述卡接件能够在所述燕尾槽内滑动,并形成倒扣,以在所述连接件的轴线方向上对所述卡接件进行限位。
14、可选地,所述滑动件上设置有成对的齿条,所述卡接件设置于成对的所述齿条之间,且所述卡接件的自由端延伸出所述燕尾槽;
15、所述夹爪上设置有成对的第二齿条,成对的所述齿条与成对的所述第二齿条一一对应地啮合锁紧;
16、所述滑动件能够带动所述夹爪和所述卡接件同步运动。
17、可选地,所述夹爪包括爪臂和卡爪;
18、所述爪臂与所述滑移组件啮合锁紧,并与所述卡接件可拆卸连接;
19、所述卡爪设置于所述爪臂上,多个所述卡爪能够夹持或解除夹持工件。
20、可选地,所述工件抓取机构还包括弹性件;
21、所述弹性件设置于所述卡爪上;所述弹性件与工件的间距不大于所述卡爪与工件的间距。
22、可选地,所述刀具抓取机构包括移动臂和基座;
23、所述移动臂能够靠近或远离所述基座,以夹持或解除夹持刀具。
24、可选地,所述卡接件与所述夹爪通过螺栓可拆卸连接。
25、进一步地,本实用新型还提供一种机器人,所述机器人包括如上所述的多功能抓手。
26、(三)有益效果
27、本实用新型的有益效果是:连接件上连接有工件抓取机构和刀具抓取机构,能够在一台机器人上将工件的夹持以及刀具的夹持功能进行集成,无需设置两台机器人分别单独实现工件以及刀具的夹持,机器人的整体结构和外形尺寸紧凑,能够节省设备的占用空间和成本。多功能抓手抓取刀具时,机器人能够对打磨设备上的刀具进行自动更换,缩短换刀时间,以对工件进行高效打磨;多功能抓手抓取工件时,机器人通过动作能够消除打磨死角,以对工件进行高效打磨。
28、多个滑移组件与连接件滑动连接,并与夹爪啮合锁紧。当多功能抓手处于工作状态时,啮合锁紧使得滑移组件无法相对于夹爪水平移动,因此能够通过滑移组件带动夹爪移动,夹爪再带动与之可拆卸连接的卡接件移动,以使工件抓取机构能够抓取或放下工件,并能够保证抓取工件时的稳定性和可靠性。
29、多个卡接件与多个滑移组件一一对应地滑动连接,并与多个夹爪一一对应地可拆卸连接。在需要对工件抓取机构的移动行程进行调节时,能够将夹爪与卡接件的可拆卸连接处进行半拆卸,即不将夹爪完全拆下,使得夹爪与滑移组件的啮合处分离,从而使卡接件能够在滑移组件内滑动。同时,夹爪仍然能够悬挂于卡接件上,便可人工同步移动夹爪和卡接件移动,以调整相对设置的夹爪之间的间距,以适应于同类型但不同尺寸的工件的抓取。当夹爪调节至预定的新位置后再紧固卡接件与夹爪,使夹爪与滑移组件重新啮合锁紧,即完成对工件抓取机构的移动行程的调节。半拆卸的调节方式调节时简单、省力、迅速、易于操作,进一步提高了工件抓取机构对同类型、多尺寸工件抓取的适应性,从而减少在多类移动行程的工件抓取机构间的更换频率。
技术特征:
1.一种多功能抓手,其特征在于,所述多功能抓手包括:
2.根据权利要求1所述的多功能抓手,其特征在于,所述滑移组件(4)包括滑动件(41)和驱动器;
3.根据权利要求2所述的多功能抓手,其特征在于,多个所述滑动件(41)绕所述连接件(1)的轴向均匀设置,且所述连接件(1)的轴线与多个所述滑动件(41)的几何中心的连线的距离均相等。
4.根据权利要求2所述的多功能抓手,其特征在于,所述滑动件(41)上开设有燕尾槽,所述卡接件(5)能够在所述燕尾槽内滑动并形成倒扣,以在所述连接件(1)的轴线方向上对所述卡接件(5)进行限位。
5.根据权利要求4所述的多功能抓手,其特征在于,所述滑动件(41)上设置有成对的第一齿条(412),所述卡接件(5)设置于成对的所述第一齿条(412)之间,且所述卡接件(5)的自由端延伸出所述燕尾槽;
6.根据权利要求1-5中任意一项所述的多功能抓手,其特征在于,所述夹爪包括爪臂(21)和卡爪(22);
7.根据权利要求6所述的多功能抓手,其特征在于,所述工件抓取机构(2)还包括弹性件(23);
8.根据权利要求1-5中任意一项所述的多功能抓手,其特征在于,所述刀具抓取机构(3)包括移动臂(31)和基座(32);
9.根据权利要求1-5中任意一项所述的多功能抓手,其特征在于,所述卡接件(5)与所述夹爪通过螺栓可拆卸连接。
10.一种机器人,其特征在于,所述机器人包括权利要求1-9中任意一项所述的多功能抓手。
技术总结
本技术涉及机器人技术领域,具体涉及一种多功能抓手及机器人,多功能抓手包括连接件、刀具抓取机构和工件抓取机构。刀具抓取机构与连接件连接;工件抓取机构包括多个夹爪、多个滑移组件和多个卡接件,多个滑移组件与连接件滑动连接;多个卡接件与多个滑移组件一一对应地滑动连接,并与多个夹爪一一对应地可拆卸连接;夹爪与滑移组件啮合锁紧;夹爪与滑移组件分离且与卡接件半拆卸时,夹爪能够与卡接件在滑移组件上同步滑动。通过半拆卸的调节方式对工件抓取机构的最大或最小移动行程进行调节,调节方式简单、省力、迅速、易于操作,提高了工件抓取机构对同类型、多尺寸工件抓取的适应性,减少了在多类移动行程的工件抓取机构间的更换频率。
技术研发人员:宋子鹏,熊浩,蔡清汀,胡俊文
受保护的技术使用者:湖南全宇工业设备有限公司
技术研发日:20230526
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!