大吨位远程液控铸造机械手及落砂工部的制作方法
本申请涉及砂型铸造设备,尤其是一种大吨位远程液控铸造机械手及落砂工部。
背景技术:
1、目前,铸造企业多采用车间行车和工人辅助相结合的方式进行砂箱的落砂清理。具体地,落砂取件时,先由人工将砂箱吊运至振动落砂机上进行振动落砂,待砂块及其中的铸件与砂箱分离后,再通过人工分别将砂箱和铸件用车间行车吊挂转运到下一个工部。
2、在砂箱落砂的过程中,铸造车间工作环境温度高,吊运等工作致使工人劳动强度大,容易损害作工人的身体健康;同时,铸造车间内粉尘多,粉尘通过口鼻进入人体,容易致使工人肺部感染、形成职业病;另外,铸造车间内噪音大,会造成工人听力下降,甚至会造成工人耳鸣、耳聋,容易引发工伤事故。
技术实现思路
1、本申请的目的是在于克服现有技术中存在的不足,提供一种大吨位远程液控铸造机械手及落砂工部。
2、为实现以上技术目的,本申请提供了一种大吨位远程液控铸造机械手,包括:搬运机构,用于接取待落砂的砂箱、并向落砂工位转移砂箱,以便于砂箱落砂;取件机构,用于接取落砂后砂箱内的铸件、并向下游转移铸件;其中,取件机构和搬运机构设于落砂工位上方;搬运机构包括夹爪、水平提取驱动件和竖直提取驱动件,水平提取驱动件用于驱使夹爪沿水平方向运动,竖直提取驱动件用于驱使夹爪沿竖直方向运动;取件机构采用多轴机械手;工作时,夹爪能够在水平提取驱动件和竖直提取驱动件的驱动下运输砂箱、还能够对砂箱进行拆解;取件机构能够多方向运动以实现铸件的提取和转移。
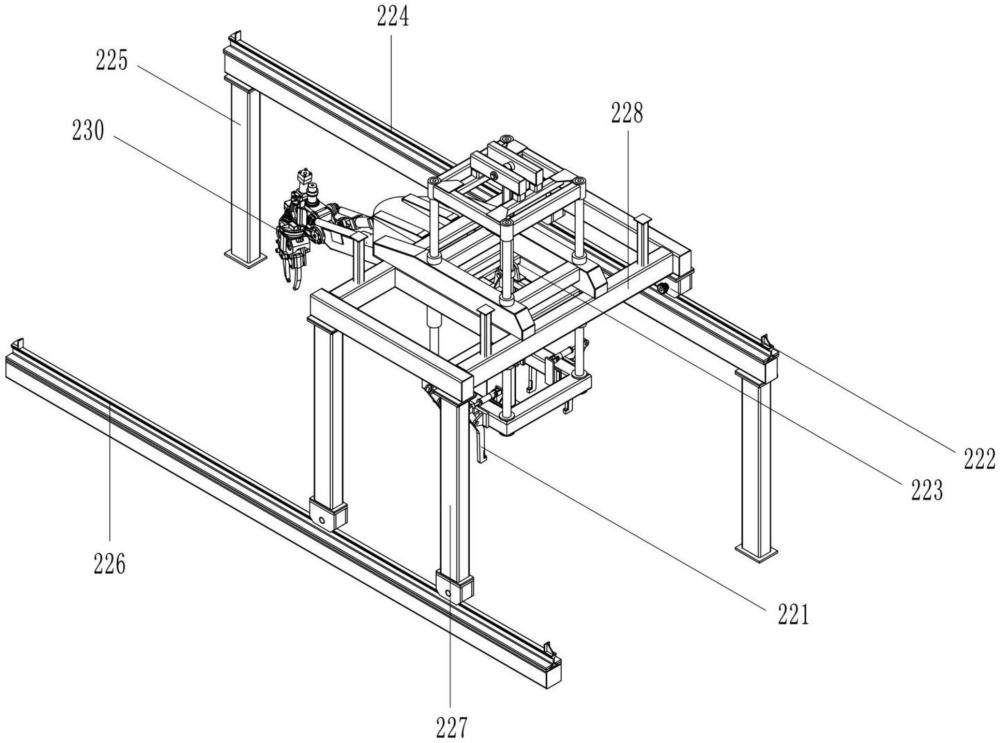
3、进一步地,搬运机构还包括:第一钢轨,通过立柱设于高处;第二钢轨,设于低处,第一钢轨和第二钢轨均沿第二方向延伸设置,且第一钢轨和第二钢轨沿第一方向间隔设置;横梁,夹爪设于横梁上,横梁的一侧与第一钢轨滑动连接、另一侧通过支撑柱与第二钢轨滑动连接;其中,第一方向、第二方向与竖直方向两两垂直。
4、进一步地,取件机构滑动设置在第一钢轨和第二钢轨上。
5、进一步地,大吨位远程液控铸造机械手还包括中转机构,中转机构用于对接搬运机构;中转机构能够接取待落砂的工件,工件包括浇注底板和砂箱,砂箱内填充有砂料,砂料中造型有铸件;搬运机构能够接取中转机构上的砂箱、并将砂箱运输至落砂工位;中转机构还能够输出空置的浇注底板;搬运机构还能够将落砂后的砂箱运输至中转机构,以便于中转机构输出砂箱。
6、进一步地,中转机构采用阶梯机动辊道。
7、进一步地,大吨位远程液控铸造机械手还包括rfid读取器,rfid读取器用于读取中转机构上的工件的信息。
8、进一步地,取件机构的荷载不少于20t;和/或,取件机构与控制系统和生产系统相连,工人能够实时远程控制取件机构。
9、本申请还提供了一种落砂工部,包括上述大吨位远程液控铸造机械手,还包括:上料装置,用于向搬运机构输送待落砂的工件;落砂装置,设于落砂工位、用于对砂箱进行落砂。
10、进一步地,落砂工部还包括:第一转移装置,用于对接上料装置和/或大吨位远程液控铸造机械手;第二转移装置,用于对接落砂装置和/或大吨位远程液控铸造机械手;第一转移装置能够接取空置的浇注底板;第一转移装置还能够接取空置的砂箱;第二转移装置能够接取铸件。
11、进一步地,落砂工部还包括:除尘室,大吨位远程液控铸造机械手和落砂装置设于除尘室内;和/或,操作室,工人能够在操作室中操控大吨位远程液控铸造机械手。
12、本申请提供了一种大吨位远程液控铸造机械手,包括搬运机构和取件机构,搬运机构包括夹爪、水平提取驱动件和竖直提取驱动件,夹爪能够在水平提取驱动件和竖直提取驱动件的驱动下运输砂箱、还能够对砂箱进行拆解,取件机构采用多轴机械手、能够对铸件进行提取和转移、还能够对铸件进行去砂;本申请提供的大吨位远程液控铸造机械手能够实现砂箱、铸件的分别转移,自动化程度高、工作效率高,能够满足多样化的部件输送及作业需要。
13、本申请还提供了一种落砂工部,包括上述大吨位远程液控铸造机械手,还包括上料装置和落砂装置,上料装置能够向大吨位远程液控铸造机械手输送待落砂的工件,落砂装置能够对砂箱进行落砂,多机构串联、配合工作,车间自动化程度高、工人作业负担小。
技术特征:
1.一种大吨位远程液控铸造机械手(200),其特征在于,包括:
2.根据权利要求1所述的大吨位远程液控铸造机械手(200),其特征在于,所述搬运机构(220)还包括:
3.根据权利要求2所述的大吨位远程液控铸造机械手(200),其特征在于,所述取件机构(230)滑动设置在所述第一钢轨(224)和所述第二钢轨(226)上。
4.根据权利要求1所述的大吨位远程液控铸造机械手(200),其特征在于,还包括中转机构(210),所述中转机构(210)用于对接所述搬运机构(220);
5.根据权利要求4所述的大吨位远程液控铸造机械手(200),其特征在于,所述中转机构(210)采用阶梯机动辊道。
6.根据权利要求4所述的大吨位远程液控铸造机械手(200),其特征在于,还包括rfid读取器,所述rfid读取器用于读取所述中转机构(210)上的工件的信息。
7.根据权利要求1-6任一项所述的大吨位远程液控铸造机械手(200),其特征在于,所述取件机构(230)的荷载不少于20t;
8.一种落砂工部,其特征在于,包括权利要求1-7任一项所述的大吨位远程液控铸造机械手(200),还包括:
9.根据权利要求8所述的落砂工部,其特征在于,还包括:
10.根据权利要求8所述的落砂工部,其特征在于,还包括:
技术总结
本申请公开了一种大吨位远程液控铸造机械手及落砂工部,大吨位远程液控铸造机械手包括搬运机构和取件机构,搬运机构包括夹爪、水平提取驱动件和竖直提取驱动件,夹爪能够在水平提取驱动件和竖直提取驱动件的驱动下运输砂箱、还能够对砂箱进行拆解,取件机构采用多轴机械手、能够对铸件进行提取和转移、还能够对铸件进行去砂;本申请提供的大吨位远程液控铸造机械手能够实现砂箱、铸件的分别转移,自动化程度高、工作效率高,能够满足多样化的部件输送及作业需要。
技术研发人员:朱以松,王海军,马金磊
受保护的技术使用者:无锡锡南铸造机械股份有限公司
技术研发日:20230815
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!