一种主体砂芯转运系统及制芯生产线的制作方法
本技术涉及柴油机铸造,尤其涉及一种主体砂芯转运系统及制芯生产线。
背景技术:
1、在柴油机铸造工厂,一条主体砂芯制芯生产线上存在多个制芯单元的情况,制完的主体砂芯需要由一条辊道输送线由工业机器人夹具夹取转运到另一条辊道输送线上,然而由于不同种类砂芯结构的不同,要求转运时工业机器人的夹具夹取砂芯位置也不同。因此,由于不能实时切换工业机器人抓取程序,导致制芯生产线只能同时生产一种砂芯。另一方面,由于主体砂芯经过表干窑之后,砂芯的螺栓可能会松了,则在主体砂芯制芯线上的工序需要根据砂芯的种类进行人工钻孔和对砂芯螺栓杆进行复紧,目前采用人工复紧的方式生产效率低下,且劳动强度大。
技术实现思路
1、本实用新型提供了一种主体砂芯转运系统及制芯生产线,以解决目前主体砂芯转运存在浪费人力、劳动强度大以及不能混线生产的问题。
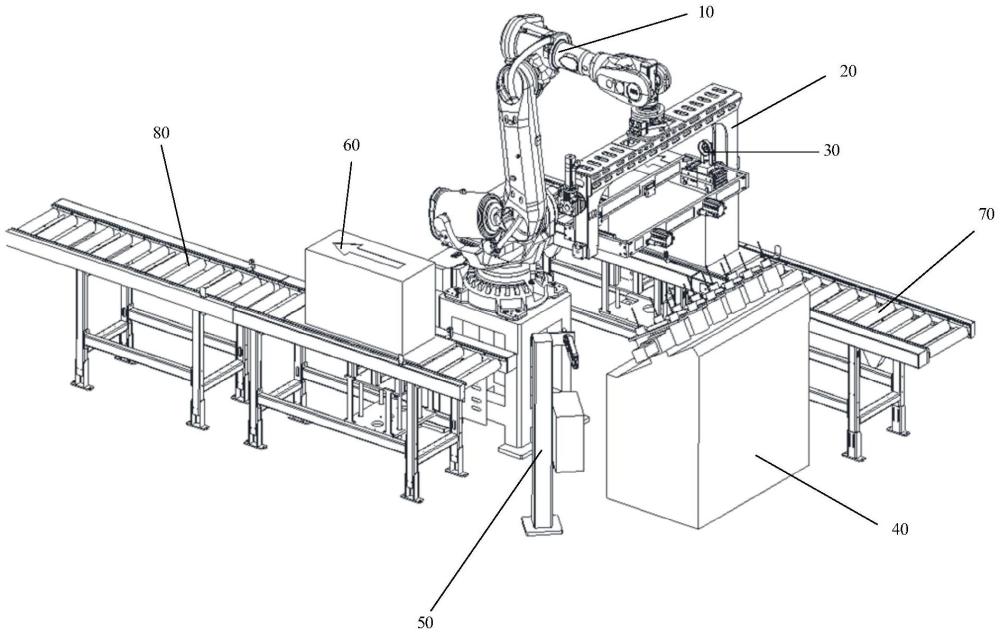
2、根据本实用新型的一方面,提供了一种主体砂芯转运系统,所述主体砂芯转运系统包括工业机器人、夹具、图像采集模块、钻孔装置、拧紧装置以及控制模块;所述工业机器人与所述夹具机械连接,所述工业机器人控制所述夹具位于制芯辊道线上方,所述图像采集模块设置于制芯辊道线上方,所述制芯辊道线、所述钻孔装置、所述拧紧装置以及立库线辊道依次排列,所述工业机器人、所述夹具、所述图像采集模块、所述钻孔装置以及所述拧紧装置分别与所述控制模块电连接;
3、所述图像采集模块用于采集所述制芯辊道线上的主体砂芯图像,并将所述主体砂芯图像反馈至所述控制模块,以通过所述控制模块根据所述主体砂芯图像确定主体砂芯种类;
4、所述工业机器人用于控制所述夹具夹取主体砂芯,并将所述主体砂芯依次转运至所述钻孔装置、所述拧紧装置以及所述立库线辊道;
5、所述钻孔装置用于根据所述控制模块确定的主体砂芯种类,调节钻孔距离后对所述主体砂芯进行钻孔;
6、所述拧紧装置用于根据所述控制模块确定的主体砂芯种类,调节拧紧参数后对所述主体砂芯螺栓进行拧紧。
7、可选的,所述夹具包括连接盘、伺服电机、框架机械结构和多个气缸;所述连接盘用于连接所述工业机器人,所述伺服电机和所述气缸设置于所述框架机械结构上。
8、可选的,所述钻孔装置包括工作台、多个滑座、伺服模组和多个钻头;所述伺服模组固定在所述工作台上,所述滑座固定在所述伺服模组上,所述钻头固定在所述伺服模组的滑座上。
9、可选的,所述拧紧装置包括支架、拧紧轴和拧紧控制器;所述拧紧轴和所述拧紧控制器固定在所述支架上。
10、可选的,所述拧紧轴为电动拧紧轴。
11、可选的,所述主体砂芯转运系统还包括报警模块,所述报警模块与所述控制模块电连接;
12、所述报警模块用于在所述控制模块无法根据所述主体砂芯图像确定主体砂芯种类时,产生报警信号,以通过所述报警信号提示主体砂芯种类识别失败。
13、可选的,所述主体砂芯转运系统还包括显示模块,所述显示模块与所述报警模块电连接;
14、所述显示模块用于在所述报警模块产生报警信号,获取并显示主体砂芯的实际主体砂芯种类。
15、根据本实用新型的另一方面,提供了一种制芯生产线,所述制芯生产线包括砂芯立库、表干窑以及多个如本实用新型任一实施例所述的主体砂芯转运系统。
16、本实用新型实施例的技术方案,该主体砂芯转运系统包括工业机器人、夹具、图像采集模块、钻孔装置、拧紧装置以及控制模块;所述工业机器人与所述夹具机械连接,所述工业机器人控制所述夹具位于制芯辊道线上方,所述图像采集模块设置于制芯辊道线上方,所述制芯辊道线、所述钻孔装置、所述拧紧装置以及立库线辊道依次排列,所述工业机器人、所述夹具、所述图像采集模块、所述钻孔装置以及所述拧紧装置分别与所述控制模块电连接;所述图像采集模块用于采集所述制芯辊道线上的主体砂芯图像,并将所述主体砂芯图像反馈至所述控制模块,以通过所述控制模块根据所述主体砂芯图像确定主体砂芯种类;所述工业机器人用于控制所述夹具夹取主体砂芯,并将所述主体砂芯依次转运至所述钻孔装置、所述拧紧装置以及所述立库线辊道;所述钻孔装置用于根据所述控制模块确定的主体砂芯种类,调节钻孔距离后对所述主体砂芯进行钻孔;所述拧紧装置用于根据所述控制模块确定的主体砂芯种类,调节拧紧参数后对所述主体砂芯螺栓进行拧紧。本实用新型解决了目前主体砂芯转运存在浪费人力、劳动强度大以及不能混线生产的问题,实现主体砂芯转运可适用不同种类的砂芯,同时自动调整砂芯拧紧参数以及钻孔参数,节省人力,提升主体砂芯转运安全性。
17、应当理解,本部分所描述的内容并非旨在标识本实用新型的实施例的关键或重要特征,也不用于限制本实用新型的范围。本实用新型的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种主体砂芯转运系统,其特征在于,所述主体砂芯转运系统包括工业机器人、夹具、图像采集模块、钻孔装置、拧紧装置以及控制模块;所述工业机器人与所述夹具机械连接,所述工业机器人控制所述夹具位于制芯辊道线上方,所述图像采集模块设置于制芯辊道线上方,所述制芯辊道线、所述钻孔装置、所述拧紧装置以及立库线辊道依次排列,所述工业机器人、所述夹具、所述图像采集模块、所述钻孔装置以及所述拧紧装置分别与所述控制模块电连接;
2.根据权利要求1所述的主体砂芯转运系统,其特征在于,所述夹具包括连接盘、伺服电机、框架机械结构和多个气缸;所述连接盘用于连接所述工业机器人,所述伺服电机和所述气缸设置于所述框架机械结构上。
3.根据权利要求1所述的主体砂芯转运系统,其特征在于,所述钻孔装置包括工作台、多个滑座、伺服模组和多个钻头;所述伺服模组固定在所述工作台上,所述滑座固定在所述伺服模组上,所述钻头固定在所述伺服模组的滑座上。
4.根据权利要求1所述的主体砂芯转运系统,其特征在于,所述拧紧装置包括支架、拧紧轴和拧紧控制器;所述拧紧轴和所述拧紧控制器固定在所述支架上。
5.根据权利要求4所述的主体砂芯转运系统,其特征在于,所述拧紧轴为电动拧紧轴。
6.根据权利要求1所述的主体砂芯转运系统,其特征在于,所述主体砂芯转运系统还包括报警模块,所述报警模块与所述控制模块电连接;
7.根据权利要求6所述的主体砂芯转运系统,其特征在于,所述主体砂芯转运系统还包括显示模块,所述显示模块与所述报警模块电连接;
8.一种制芯生产线,其特征在于,所述制芯生产线包括砂芯立库、表干窑以及多个如权利要求1-7中任一项所述的主体砂芯转运系统。
技术总结
本技术公开了一种主体砂芯转运系统及制芯生产线。该主体砂芯转运系统包括工业机器人、夹具、图像采集模块、钻孔装置、拧紧装置以及控制模块;图像采集模块用于采集制芯辊道线上的主体砂芯图像,并将主体砂芯图像反馈至控制模块,以通过控制模块根据主体砂芯图像确定主体砂芯种类;工业机器人用于控制夹具夹取主体砂芯,并将主体砂芯依次转运至钻孔装置、拧紧装置以及立库线辊道;钻孔装置用于根据控制模块确定的主体砂芯种类,调节钻孔距离后对主体砂芯进行钻孔;拧紧装置用于根据控制模块确定的主体砂芯种类,调节拧紧参数后对主体砂芯螺栓进行拧紧。本技术实现主体砂芯转运可适用不同种类的砂芯。
技术研发人员:郭志明,任怀喜,桑国良,张习国
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:20230913
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!