一种自动装配工具的打磨机器人标准工作站的制作方法
本技术涉及工业自动化和机器人打磨去毛刺领域,具体是一种抓工具打磨机器人标准工作站。
背景技术:
1、在目前的铸造行业中,所有铸造出来的产品均有冒口与合模线,主要通过人工手动方式对工件冒口与合模型进行处理,铸件在浇铸完成之后,表面往往存在不少飞边和浇冒口,需要打磨光滑后交付。现阶段工业上小型铸件已经可以自动打磨了,然而大型铸件因为体型巨大,表面多又复杂,难以实现打磨自动化,所以工业现有的打磨手段是人工打磨,需要熟练的打磨工人,然而打磨环境恶劣,打磨过程中会产生的大量粉尘,对打磨工人的身体造成严重危害,导致打磨工人难招。随着科技的发展,劳动强度大,工作环境恶劣,甚至严重影响操作人员身体健康的岗位,正逐步被自动化、智能化设备所取代,故智能化打磨机器人应用而生。
2、小批量多品种是大部分铸造厂的通病问题,给自动化设备生产商增加不少难题,随着科技的发展,加上在铸造行业多年的积累与摸索,提出了一种抓工具打磨机器人标准工作站,通过离线编程与视觉引导技术,配合自动换刀浮动电主轴,解决以下问题:调试:机器人调试程序难度大,且调试周期长;设备使用寿命。大部分铸造的产品不仅外形尺寸一致型较差,而且浇冒口与合模线的位置与大小随着模具的老化,也会出现很大的差异,若采用硬接触的打磨方式,不仅影响电主轴在自动化打磨过程中使用寿命,而且也会造成打磨产品的过打或是少打,打磨后产品的质量得不到保证,且刀具的寿命也大大降低。安全:人工打磨产品有夹伤手的危险,使用工业机器人则可确保生产安全顺利的进行,避免因为工人疲劳和操作失误引起的风险。环保:环境污染少、减少二次投资,整体机器人工作站可以采用集中式粉尘回收系统,减少二次投资。管理:机器人不会因为疲劳、情绪低下以及环境恶劣等而使效率或是良品率降低;品质:打磨产品一致性好,品质得到保证。产业:使用机械手,品质得到保证,更可精确的计算产量。
技术实现思路
1、本实用新型的目的是提供一种自动装配工具的打磨机器人标准工作站,该标准工作站主要包含工业机器人、自动换刀浮动电主轴、刀库、双工位三轴旋转台、视觉系统、整体底座、钣金板房、电控系统等组成,具有自动化程度高、结构简单以及工作可靠的特点,能够有效提高生产效率、提升产品质量、降低生产成本。
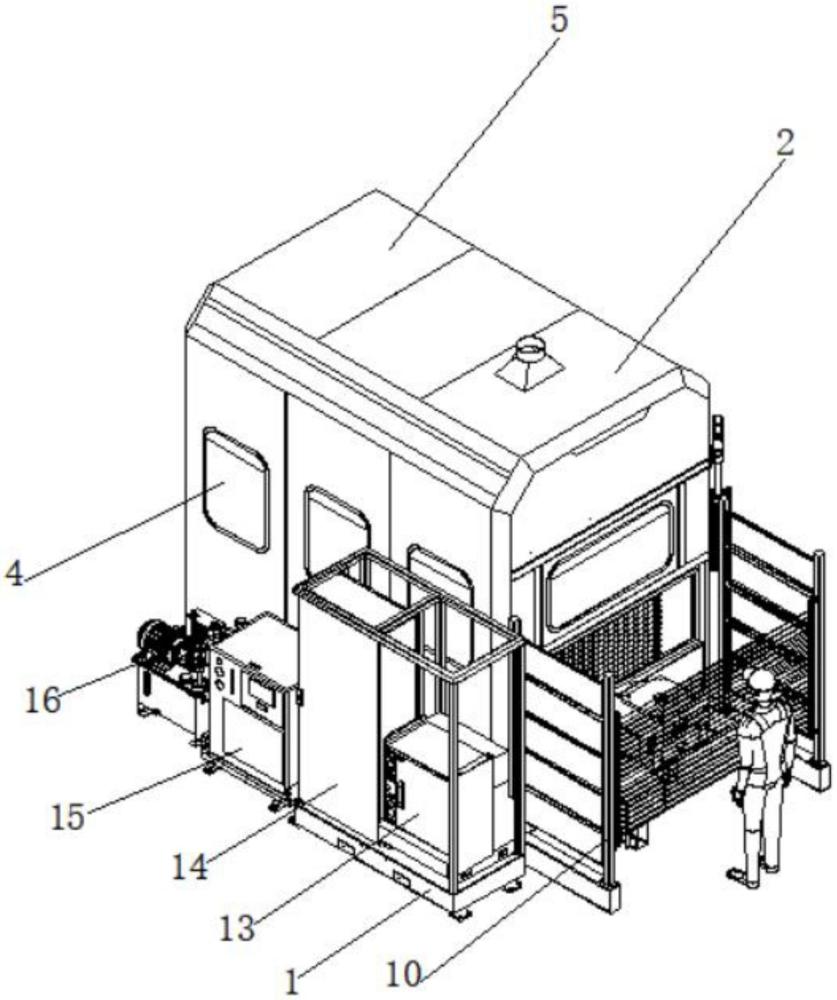
2、本实用新型解决其技术问题所采用的技术方案是:一种自动装配工具的打磨机器人标准工作站,包括工作站结构、设在工作站结构中的操作机器人结构以及设在工作站结构中的辅助组件结构,所述的工作站结构包括工作站底座、设在工作站底座外部的钣金操作板房体以及设在钣金操作板房体中的通道门和多个观察窗口,所述的操作机器人结构包括设在工作站底座上部的工业机器人机座、连接工业机器人机座上部的工业机器人控制节臂结构、设在工业机器人控制节臂结构上的自动换刀电主轴,在外部钣金操作板房体工作端部设置双工位三轴旋转台。
3、钣金操作板房体的外部设有安全光栅,所述的双工位三轴旋转台设在安全光栅内。
4、所述的辅助组件结构包括设在钣金操作板房体内部的刀库结构、设在钣金操作板房体一侧外部的悬臂控制箱、设在钣金操作板房体另一侧外部的系统控制组件,
5、具体的,所述的系统控制组件包括机器人电控柜、电控柜、冷水机以及液压站。
6、所述的钣金操作板房体中设置视觉监控箱。
7、在自动换刀电主轴下方的工作站底座中设有废料导出车。
8、本实用新型的有益效果:本实用新型的有益效果是:本实用新型结构布局设计合理、安装方便,采用离线编程和视觉引导技术,来纠偏产品的安装位置以及铸造偏差,补偿给打磨机器人程序,通过浮动电主轴以及刀库,克服铸造产品一致性差和多工艺的难题;同时本结构简单,生产制造成本低,易于后期维护保养。
9、以下将结合附图和实施例,对本实用新型进行较为详细的说明。
技术特征:
1.一种自动装配工具的打磨机器人标准工作站,其特征在于:包括工作站结构、设在工作站结构中的操作机器人结构以及设在工作站结构中的辅助组件结构,所述的工作站结构包括工作站底座、设在工作站底座外部的钣金操作板房体以及设在钣金操作板房体中的通道门和多个观察窗口,所述的操作机器人结构包括设在工作站底座上部的工业机器人机座、连接工业机器人机座上部的工业机器人控制节臂结构、设在工业机器人控制节臂结构上的自动换刀电主轴,在外部钣金操作板房体工作端部设置双工位三轴旋转台。
2.如权利要求1所述的自动装配工具的打磨机器人标准工作站,其特征在于:钣金操作板房体的外部设有安全光栅,所述的双工位三轴旋转台设在安全光栅内。
3.如权利要求1所述的自动装配工具的打磨机器人标准工作站,其特征在于:所述的辅助组件结构包括设在钣金操作板房体内部的刀库结构、设在钣金操作板房体一侧外部的悬臂控制箱、设在钣金操作板房体另一侧外部的系统控制组件。
4.如权利要求3所述的自动装配工具的打磨机器人标准工作站,其特征在于:所述的系统控制组件包括机器人电控柜、电控柜、冷水机以及液压站。
5.如权利要求1所述的自动装配工具的打磨机器人标准工作站,其特征在于:所述的钣金操作板房体中设置视觉监控箱。
6.如权利要求1所述的自动装配工具的打磨机器人标准工作站,其特征在于:在自动换刀电主轴下方的工作站底座中设有废料导出车。
技术总结
本技术是一种自动装配工具的打磨机器人标准工作站,包括工作站结构、操作机器人结构以及辅助组件结构,工作站结构包括工作站底座、钣金操作板房体,操作机器人结构包括设在工作站底座上部的工业机器人机座、工业机器人控制节臂结构、设在工业机器人控制节臂结构上的自动换刀电主轴,在外部钣金操作板房体工作端部设置双工位三轴旋转台。本技术的有益效果是:本技术结构布局设计合理、安装方便,采用离线编程和视觉引导技术,来纠偏产品的安装位置以及铸造偏差,补偿给打磨机器人程序,通过浮动电主轴以及刀库,克服铸造产品一致性差和多工艺的难题;同时本结构简单,生产制造成本低,易于后期维护保养。
技术研发人员:胡国栋,谢小四,过成忠,夏坤
受保护的技术使用者:安徽墨客机器人科技有限公司
技术研发日:20230926
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!