一种LED基板玻璃抛光机器人的制作方法
本技术涉及玻璃基板加工领域,具体为一种led基板玻璃抛光机器人。
背景技术:
1、抛光机器人一般由抛光部件、夹持部件以及能够对工件进行移动的机械臂组成,通过夹持部件对工件进行夹持固定,并通过机械臂带动夹持部件进行移动,带动所需抛光的工件进行移动,并与抛光部件进行配合来达到对工件进行抛光的目的,而在对led玻璃基板的加工过程中需要对其抛光,因此需要使用抛光机器人对玻璃基板进行抛光处理。
2、现有的抛光机器人,在对led玻璃基板进行抛光时,需要通过转动两侧的转盘,转盘再带动螺杆进行转动,然后带动安装块和夹块移动,以便对物件的一侧限位,然后再转动另一侧的螺杆,使得另一侧的夹块移动以便配合另一个夹块对物件进行夹持固定,接着再进行抛光处理,但该夹持方式较为麻烦,且耗时耗力,进而降低了对物件的夹持效率。
技术实现思路
1、基于此,本实用新型的目的是提供一种led基板玻璃抛光机器人,以解决不便对物件进行快速夹持的技术问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种led基板玻璃抛光机器人,包括底座和升降板,所述升降板的底部设有夹持组件,且夹持组件包括开设于升降板顶部两侧的限位槽、通过两根固定杆连接于升降板底部的支撑板、设于升降板底部中间位置处的驱动电机和两个从动齿轮,所述驱动电机的输出端连接有主动齿轮,所述支撑板的顶部开设有活动槽,且活动槽的内部设置有多个活动块,所述活动块的顶部安装有齿环,所述限位槽的内部设置有限位块,且限位块的底部连接有齿条,并且限位块的顶部安装有夹板,所述底座的内部一侧设有清理组件。
3、通过采用上述技术方案,当需对玻璃基板进行夹持时,使用者可启动驱动电机,驱动电机工作可带动主动齿轮转动,主动齿轮则会带动齿环旋转。
4、进一步的,所述清理组件包括安装于底座上的多个导线轮与固定于底座内部一侧的滑杆,所述滑杆的外壁套接有滑座,且滑座的一侧固定有清料板,并且滑座与底座的内壁之间连接有弹簧,所述滑座的另一侧上方连接有贯穿至底座外部的拉绳。
5、通过采用上述技术方案,而滑座带动清料板往底座内壁方向移动时,可避免清料板阻碍抛光盘移动,使得抛光盘能够对玻璃基板的不同位置进行抛光处理。
6、进一步的,所述拉绳的一端通过导线轮并与升降板的底部一侧连接,所述清料板通过滑座与滑杆滑动连接。
7、通过采用上述技术方案,当升降板上移时其会拉扯拉绳,拉绳被拉动后其会带动滑座移动,使得滑座挤压弹簧。
8、进一步的,所述底座的内部下方开设有两条凹槽,所述底座的一侧下方安装有两个第一电机,所述第一电机的输出端连接有延伸至凹槽内部的双向丝杆。
9、通过采用上述技术方案,当需调整升降板的高度时,使用者可启动第一电机,第一电机工作可带动双向丝杆转动,然后带动螺纹座移动。
10、进一步的,所述双向丝杆的外壁套接有两个螺纹座,所述螺纹座的顶部转动连接有支撑架,且支撑架的顶部通过连接轴与升降板连接。
11、通过采用上述技术方案,当双向丝杆转动时其会带动两个螺纹座相向移动或相背移动,然后带动支撑架转动,支撑架则可带动升降板移动。
12、进一步的,所述底座的背部设有机器人底座,所述机器人底座的顶部安装有机器人腰转关节,且机器人腰转关节上设有机械臂。
13、通过采用上述技术方案,机器人底座可机器人腰转关节起到支撑作用,同时机械臂能够带动活动座在横板上移动。
14、进一步的,所述底座的内部设有两个横板,两个所述横板之间滑动连接有活动座,所述活动座的顶部安装有第二电机。
15、通过采用上述技术方案,活动座可在横板上移动,而活动座移动时其会带动第二电机移动,然后带动抛光盘移动。
16、进一步的,所述第二电机的输出端连接有抛光盘,所述机械臂与活动座之间通过活动轴活动连接。
17、通过采用上述技术方案,当第二电机工作时其会带动抛光盘转动,抛光盘转动后其会对玻璃基板进行抛光处理。
18、综上所述,本实用新型主要具有以下有益效果:
19、1、本实用新型通过设置有夹持组件,当需对玻璃基板进行夹持时,使用者可启动驱动电机,驱动电机工作可带动主动齿轮转动,主动齿轮则会带动齿环旋转,然后带动两个从动齿轮同向转动,从动齿轮则带动齿条移动,齿条再带动限位块在限位槽内部移动,然后带动夹板移动,使得夹板夹持玻璃基板,通过该方式可快速对玻璃基板进行夹持,无需转动两侧的手轮并带动夹板移动,省时省力,进而提高对玻璃基板的夹持效率;
20、2、本实用新型通过设置有清理组件,当升降板上移时其会拉扯拉绳,拉绳被拉动后其会带动滑座移动,使得滑座挤压弹簧,同时带动清料板往底座内壁方向移动,可避免清料板阻碍抛光盘移动,使得后续抛光盘能够对玻璃基板的不同位置进行抛光处理,而当需清理抛光盘底部附着的废料时,可通过机械臂带动活动座往清料板方向移动,使得抛光盘移动时其底部能够与清料板接触,而清料板则可刮除掉抛光盘底部附着的物料,避免部分残余废料附着在抛光盘底部而影响后续对玻璃基板进行打磨的效果,并提高对抛光盘底部废料的清料效率。
技术特征:
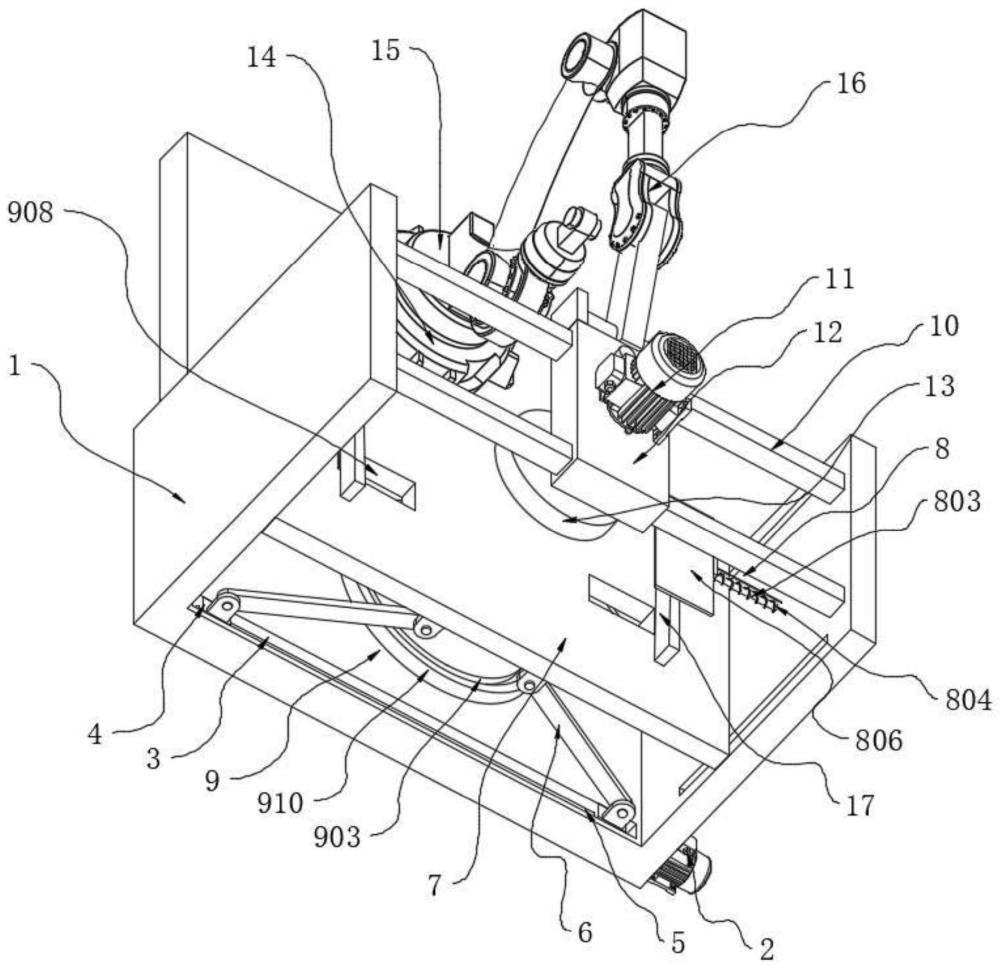
1.一种led基板玻璃抛光机器人,包括底座(1)和升降板(7),其特征在于:所述升降板(7)的底部设有夹持组件(9),且夹持组件(9)包括开设于升降板(7)顶部两侧的限位槽(908)、通过两根固定杆连接于升降板(7)底部的支撑板(910)、设于升降板(7)底部中间位置处的驱动电机(905)和两个从动齿轮(904),所述驱动电机(905)的输出端连接有主动齿轮(906),所述支撑板(910)的顶部开设有活动槽(903),且活动槽(903)的内部设置有多个活动块(902),所述活动块(902)的顶部安装有齿环(901),所述限位槽(908)的内部设置有限位块(909),且限位块(909)的底部连接有齿条(907),并且限位块(909)的顶部安装有夹板(17),所述底座(1)的内部一侧设有清理组件(8)。
2.根据权利要求1所述的一种led基板玻璃抛光机器人,其特征在于:所述清理组件(8)包括安装于底座(1)上的多个导线轮(802)与固定于底座(1)内部一侧的滑杆(803),所述滑杆(803)的外壁套接有滑座(805),且滑座(805)的一侧固定有清料板(806),并且滑座(805)与底座(1)的内壁之间连接有弹簧(804),所述滑座(805)的另一侧上方连接有贯穿至底座(1)外部的拉绳(801)。
3.根据权利要求2所述的一种led基板玻璃抛光机器人,其特征在于:所述拉绳(801)的一端通过导线轮(802)并与升降板(7)的底部一侧连接,所述清料板(806)通过滑座(805)与滑杆(803)滑动连接。
4.根据权利要求1所述的一种led基板玻璃抛光机器人,其特征在于:所述底座(1)的内部下方开设有两条凹槽(3),所述底座(1)的一侧下方安装有两个第一电机(2),所述第一电机(2)的输出端连接有延伸至凹槽(3)内部的双向丝杆(5)。
5.根据权利要求4所述的一种led基板玻璃抛光机器人,其特征在于:所述双向丝杆(5)的外壁套接有两个螺纹座(4),所述螺纹座(4)的顶部转动连接有支撑架(6),且支撑架(6)的顶部通过连接轴与升降板(7)连接。
6.根据权利要求1所述的一种led基板玻璃抛光机器人,其特征在于:所述底座(1)的背部设有机器人底座(14),所述机器人底座(14)的顶部安装有机器人腰转关节(15),且机器人腰转关节(15)上设有机械臂(16)。
7.根据权利要求6所述的一种led基板玻璃抛光机器人,其特征在于:所述底座(1)的内部设有两个横板(10),两个所述横板(10)之间滑动连接有活动座(12),所述活动座(12)的顶部安装有第二电机(11)。
8.根据权利要求7所述的一种led基板玻璃抛光机器人,其特征在于:所述第二电机(11)的输出端连接有抛光盘(13),所述机械臂(16)与活动座(12)之间通过活动轴活动连接。
技术总结
本技术公开了一种LED基板玻璃抛光机器人,涉及玻璃基板加工领域,本技术包括底座和升降板,升降板的底部设有夹持组件,且夹持组件包括开设于升降板顶部两侧的限位槽、通过两根固定杆连接于升降板底部的支撑板。本技术通过设置有夹持组件,当需对玻璃基板进行夹持时,使用者可启动驱动电机,驱动电机工作可带动主动齿轮转动,主动齿轮则会带动齿环旋转,然后带动两个从动齿轮同向转动,从动齿轮则带动齿条移动,齿条再带动限位块在限位槽内部移动,然后带动夹板移动,使得夹板夹持玻璃基板,通过该方式可快速对玻璃基板进行夹持,无需转动两侧的手轮并带动夹板移动,省时省力,进而提高对玻璃基板的夹持效率。
技术研发人员:冯志庆
受保护的技术使用者:泽木焱光学科技(苏州)有限公司
技术研发日:20231221
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!