精磨自动上料机的制作方法
本技术属于杆体加工设备领域,具体涉及精磨自动上料机。
背景技术:
1、在碳纤维杆体尤其是碳纤维鱼竿的加工制作过程中需要对杆体进行精磨以形成适宜的砂面,便于后续加工。打磨杆体上通常有用于对打磨进行定位的定位线,打磨过程中需要人工将杆体置于精磨机的砂轮和导轮之间,定位线与砂轮边缘对齐,精磨机的导轮将杆体压向砂轮并驱动杆体转动,砂轮转动对杆体进行打磨,打磨后导轮向远离砂轮方向移动,打磨好的杆体从精磨机打磨处释放。在整个打磨过程中需要人工将杆体置于砂轮和导轮之间,定位线与砂轮边缘的对齐完全人工判断,定位误差大。人工上料、下料的劳动强度大,长时间工作易出现定位错位,而影响杆体打磨的精度,造成后续工序无法顺利进行,而影响鱼竿的质量。
技术实现思路
1、本实用新型的目的是提供一种精磨自动上料机,精磨自动上料机能够自动向精磨机输送杆体,打磨完成后自动完成下料,其工作效率高,打磨定位准确,可提高杆体打磨的精度,提高杆体加工的品质。
2、为了达到上述目的,本申请所采用的技术方案为:
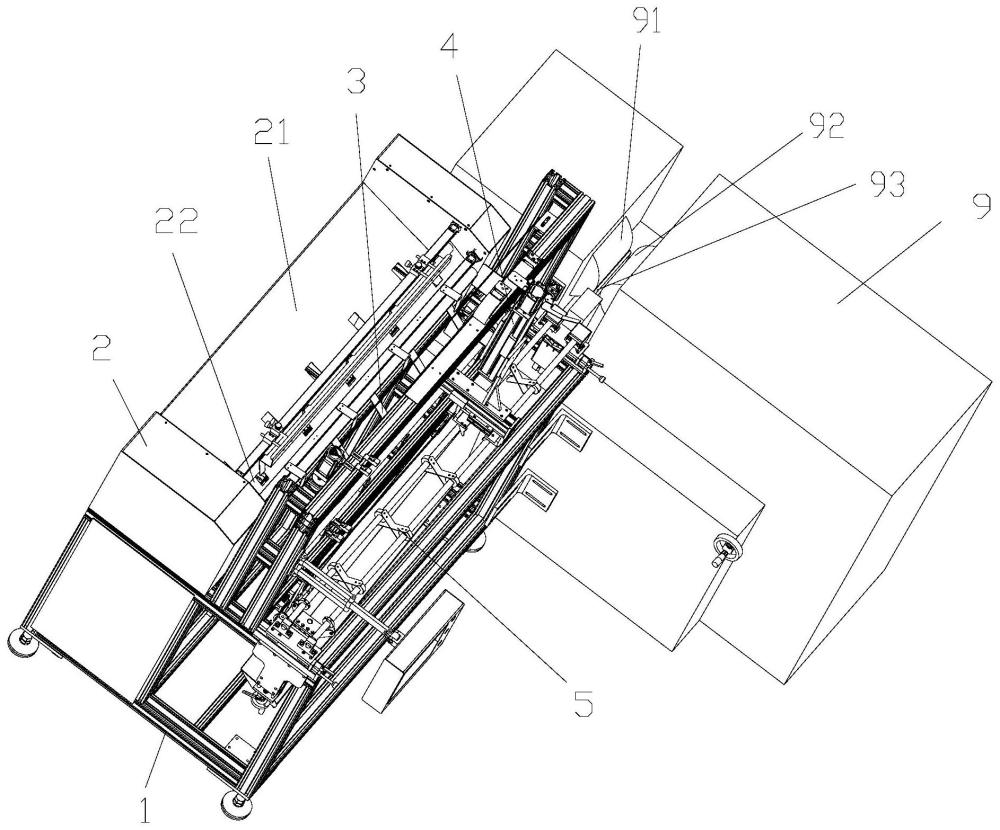
3、一种精磨自动上料机,包括机架以及设置在机架上的送料仓、定位确位机构、搬运机械手和接送料组件,所述送料仓向定位确位机构输送杆体,所述定位确位机构包括杆体置放工位、设置在近端的夹持定位件和设置远端以推动杆体向夹持定位件方向移动的推动件;所述搬运机械手将定位确位机构上的杆体输送至接送料组件,接送料组件设置于精磨机一侧,接收搬运机械手输送的杆体并将杆体置于精磨机砂轮与导轮之间。
4、作为一种优选方式,所述杆体置放工位包括设置在机架上的v型块,v型块在送料仓一侧设有导料板。
5、作为一种优选方式,所述搬运机械手包括移位组件和夹持件,所述移位组件与所述夹持件连接以带动夹持件沿着x方向、y方向及z方向移动,所述夹持件设置有具有第一状态和第二状态的夹爪,当所述夹爪处于所述第一状态时,所述夹爪夹持杆体,当所述夹爪处于所述第二状态时,所述夹爪松开杆体;接送料组件设置于精磨机一侧,接收搬运机械手输送的杆体并将杆体置于精磨机砂轮与导轮之间。
6、作为一种优选方式,所述夹持定位件包括传感件和传感器l型手指,传感件和传感器l型手指分别与第一滑块和第二滑块连接,第一滑块和第二滑块沿第一线轨移动使得传感件和传感器l型手指夹持杆体或松开杆体。
7、更优地,所述第一滑块和第二滑块分别与上齿条和下齿条连接,上齿条和下齿条分别位于直齿轮的上下方并与直齿轮啮合,第一步进电机驱动直齿轮转动。
8、作为一种优选方式,推动件包括推板和推板滑块,推板与推板滑块连接,推板滑块沿着设置在机架上的第二线轨移动。
9、作为一种优选方式,接送料组件包括两组转轴和设置在转轴上的接料板,随着转轴的转动两组转轴上的接料板交错托举杆体或打开释放杆体。
10、更优地,所述转轴上设多个固定环,远端固定环与第一翻转连接杆上端连接,其他固定环与接料板连接,第一翻转连接杆下端与第二翻转连接杆上端铰接,第二翻转连接杆下端与翻转推块铰接;翻转推块与第一双光轴模组的滑块固定,滑块沿双光轴上下移动。
11、更优地,在近端的转轴之间下方设有顶升机构,所述顶升机构包括顶升块和驱动顶升块升降的顶升气缸。
12、更优地,在近端转轴上方设有压杆机构,所述压杆机构包括可上下移动的压杆板。
13、作为一种优选方式,支撑转轴的轴承座设置在安装板a上,安装板a与滑块a连接,滑块a沿z向设置的滑轨a移动。
14、更优地,滑轨a与调节板连接,调节板与第二双光轴模组的滑块固定,第二双光轴模组的滑块沿双光轴上下移动。
15、作为一种优选方式,在转轴下方设有下料翻转机构,下料翻转机构包括下料翻转板和翻转气缸,下料翻转板倾斜设置,翻转气缸驱动下料翻转板翻转。
16、本实用新型的有益效果是:本实用新型精磨自动上料机结构设计合理,定位确位机构能够对打磨位置进行定位,搬运机械手在杆体输送过程中根据定位确位机构确位,将杆体沿x方向移动设定距离使得杆体打磨位置与精磨机的砂轮外缘相对应,提高定位准确性,打磨后自动完成下料操作,能够全自动完成对精磨机的上下料操作,极大提高杆体打磨效率和精度。
技术特征:
1.一种精磨自动上料机,其特征在于:包括机架以及设置在机架上的送料仓、定位确位机构、搬运机械手和接送料组件,所述送料仓向定位确位机构输送杆体,所述定位确位机构包括杆体置放工位、设置在近端的夹持定位件和设置远端以推动杆体向夹持定位件方向移动的推动件;所述搬运机械手将定位确位机构上的杆体输送至接送料组件,接送料组件设置于精磨机一侧,接收搬运机械手输送的杆体并将杆体置于精磨机砂轮与导轮之间。
2.根据权利要求1所述的一种精磨自动上料机,其特征在于:所述杆体置放工位包括设置在机架上的v型块,v型块在送料仓一侧设有导料板。
3.根据权利要求1所述的一种精磨自动上料机,其特征在于:搬运机械手包括移位组件和夹持件,所述移位组件与所述夹持件连接以带动夹持件沿着x方向、y方向及z方向移动,所述夹持件设置有具有第一状态和第二状态的夹爪,当所述夹爪处于所述第一状态时,所述夹爪夹持杆体,当所述夹爪处于所述第二状态时,所述夹爪松开杆体。
4.根据权利要求1所述的一种精磨自动上料机,其特征在于:所述夹持定位件包括传感件和传感器l型手指,传感件和传感器l型手指分别与第一滑块和第二滑块连接,第一滑块和第二滑块沿第一线轨移动使得传感件和传感器l型手指夹持杆体或松开杆体。
5.根据权利要求1所述的一种精磨自动上料机,其特征在于:推动件包括推板和推板滑块,推板与推板滑块连接,推板滑块沿着设置在机架上的第二线轨移动。
6.根据权利要求1所述的一种精磨自动上料机,其特征在于:接送料组件包括两组转轴和设置在转轴上的接料板,随着转轴的转动两组转轴上的接料板交错托举杆体或打开释放杆体。
7.根据权利要求6所述的一种精磨自动上料机,其特征在于:在近端的转轴之间下方设有顶升机构,所述顶升机构包括顶升块和驱动顶升块升降的顶升气缸。
8.根据权利要求6所述的一种精磨自动上料机,其特征在于:在近端转轴上方设有压杆机构,所述压杆机构包括可上下移动的压杆板。
9.根据权利要求6所述的一种精磨自动上料机,其特征在于:支撑转轴的轴承座设置在安装板a上,安装板a与滑块a连接,滑块a沿z向设置的滑轨a移动;滑轨a与调节板连接,调节板与第二双光轴模组的滑块固定,第二双光轴模组的滑块沿双光轴上下移动。
10.根据权利要求6所述的一种精磨自动上料机,其特征在于:在转轴下方设有下料翻转机构,下料翻转机构包括下料翻转板和翻转气缸,下料翻转板倾斜设置,翻转气缸驱动下料翻转板翻转。
技术总结
申请公开了一种精磨自动上料机,包括机架以及设置在机架上的送料仓、定位确位机构、搬运机械手和接送料组件,所述送料仓向定位确位机构输送杆体,所述定位确位机构包括杆体置放工位、设置在近端的夹持定位件和设置远端以推动杆体向夹持定位件方向移动的推动件;所述搬运机械手将定位确位机构上的杆体输送至接送料组件,接送料组件设置于精磨机一侧,接收搬运机械手输送的杆体并将杆体置于精磨机砂轮与导轮之间。精磨自动上料机能够自动向精磨机输送杆体,打磨完成后自动完成下料,其工作效率高,打磨定位准确,可提高杆体打磨的精度,提高杆体加工的品质。
技术研发人员:刘超,夏凡
受保护的技术使用者:威海汉鼎工业自动化有限公司
技术研发日:20231227
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!