一种镁合金浇铸用自动刮皮装置的制作方法
本发明涉及热熔机领域,特别是涉及镁合金浇铸用自动刮皮装置。
背景技术:
1、镁合金是以镁为基础加入其他元素组成的合金。镁合金特点是:密度小(1.8g/cm3左右)、强度高、弹性模量大、散热好、消震性好、承受冲击载荷能力比铝合金大、耐有机物和碱的腐蚀性能好。镁合金的主要合金元素有铝、锌、锰、铈、钍以及少量锆或镉等。使用最广的是镁铝合金,其次是镁锰合金和镁锌锆合金。主要用于航空、航天、运输、化工、火箭等工业部门。得益于中国汽车工业和3c等行业的转型升级及其中国经济地位的显著提升,镁合金行业令市场看好。镁合金浇铸是把镁合金液通过浇铸管通入到模具内,浇铸在模具内的镁合金液与模具涂料、空气接触会产生少量的氧化物,氧化物悬浮于合金液表面。
2、然而,需要操作工人使用刮皮工装把悬浮于合金液表面的氧化物刮掉,从而提高合金锭的表面质量。操作工人使用刮皮工装把悬浮于合金液表面的氧化物刮掉的劳动强度大、效率低下、安全隐患大,满足不了镁合金高效率生产的要求。
技术实现思路
1、基于此,有必要针对操作工人使用刮皮工装把悬浮于合金液表面的氧化物刮掉的劳动强度大、效率低下、安全隐患大的技术问题,提供一种镁合金浇铸用自动刮皮装置。
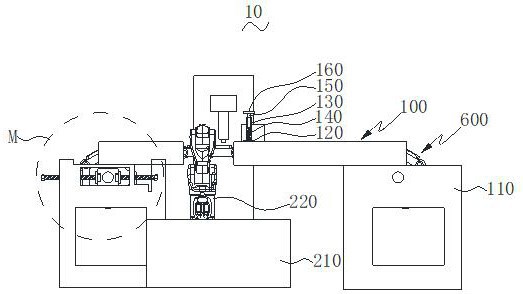
2、一种镁合金浇铸用自动刮皮装置,该镁合金浇铸用自动刮皮装置包括:承接机构、刮皮机构、浇注机、镁合金模具以及废物收集盒;
3、所述承接机构包括承接架、承接底板、承接筒、压缩弹簧、滑动柱以及承接板;所述承接筒通过所述承接底板与所述承接架连接,所述压缩弹簧与所述承接筒相适配,所述压缩弹簧收容于所述承接筒内并与所述承接筒的筒底连接;所述滑动柱与所述承接筒相适配,所述滑动柱插设于所述承接筒中并与所述承接筒滑动连接;所述滑动柱插设于所述承接筒的一端与所述压缩弹簧连接;所述承接板与所述滑动柱远离所述压缩弹簧的一端连接;
4、所述刮皮机构包括承接座、机器人手臂、驱动杆以及刮板;所述承接座设置在所述承接架的一边,所述机器人手臂与所述承接座连接,所述机器人手臂的驱动端与所述驱动杆连接,所述刮板与所述驱动杆远离所述机器人手臂的一端连接;
5、所述浇注机设置在所述承接架远离所述承接座的一边;所述镁合金模具设置在所述承接架上,所述浇注机的浇注端设置在所述镁合金模具的上方;
6、所述废物收集盒设置在所述承接架上,并靠近所述承接筒设置;
7、所述机器人手臂通过所述驱动杆驱动所述刮板将所述镁合金模具内镁合金液体表面的氧化物刮除并在所述承接板上磕碰掉,使得氧化物掉落至所述废物收集盒内。
8、在其中一个实施例中,所述承接底板与所述承接筒一体式成型设置。
9、在其中一个实施例中,所述承接板与所述滑动柱一体式成型设置。
10、在其中一个实施例中,所述承接底板与所述承接架一体式成型设置。
11、在其中一个实施例中,所述滑动柱为圆柱体结构。
12、在其中一个实施例中,所述滑动柱为四棱柱体结构。
13、在其中一个实施例中,所述驱动杆为圆柱体结构。
14、在其中一个实施例中,所述驱动杆为四棱柱体结构。
15、在其中一个实施例中,所述刮板与所述驱动杆一体式成型设置。
16、在其中一个实施例中,所述承接板为长方形板状结构。
17、上述镁合金浇铸用自动刮皮装置在工作过程中,浇注机的浇注端向镁合金模具中浇注镁合金液体。机器人手臂通过驱动杆驱动刮板将镁合金模具内镁合金液体表面的氧化物刮除掉,随后机器人手臂驱动驱动杆在承接板上磕碰。驱动杆在承接板上磕碰的过程中,承接板带动滑动柱在承接筒中滑动,压缩弹簧可以对滑动柱进行缓冲,避免了驱动杆和承接板直接地硬性接触,避免驱动杆和承接板相互磨损。驱动杆在承接板上磕碰的过程中,刮板上的镁合金氧化物掉落在废物收集盒内。上述镁合金浇铸用自动刮皮装置把悬浮于合金液表面的氧化物刮掉的效率高、安全性能好。
技术特征:
1.一种镁合金浇铸用自动刮皮装置,其特征在于,包括:承接机构、刮皮机构、浇注机、镁合金模具以及废物收集盒;
2.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述承接底板与所述承接筒一体式成型设置。
3.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述承接板与所述滑动柱一体式成型设置。
4.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述承接底板与所述承接架一体式成型设置。
5.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述滑动柱为圆柱体结构。
6.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述滑动柱为四棱柱体结构。
7.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述驱动杆为圆柱体结构。
8.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述驱动杆为四棱柱体结构。
9.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述刮板与所述驱动杆一体式成型设置。
10.根据权利要求1所述的镁合金浇铸用自动刮皮装置,其特征在于,所述承接板为长方形板状结构。
技术总结
本发明提供了一种镁合金浇铸用自动刮皮装置,上述镁合金浇铸用自动刮皮装置在工作过程中,浇注机的浇注端向镁合金模具中浇注镁合金液体。机器人手臂通过驱动杆驱动刮板将镁合金模具内镁合金液体表面的氧化物刮除掉,随后机器人手臂驱动所述驱动杆在承接板上磕碰。驱动杆在承接板上磕碰的过程中,承接板带动滑动柱在承接筒中滑动,压缩弹簧可以对滑动柱进行缓冲,避免了驱动杆和承接板直接地硬性接触,避免驱动杆和承接板相互磨损。驱动杆在承接板上磕碰的过程中,刮板上的镁合金氧化物掉落在废物收集盒内。上述镁合金浇铸用自动刮皮装置把悬浮于合金液表面的氧化物刮掉的效率高、安全性能好。
技术研发人员:于勤科,汪剑,袁伟强
受保护的技术使用者:宝武镁业(惠州)有限公司
技术研发日:
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!