去毛刺方法和去毛刺装置与流程
本发明涉及机械加工,尤其涉及一种去毛刺方法和去毛刺装置。
背景技术:
1、在机械加工过程中,工件表面或边缘往往会产生毛刺,这些毛刺不仅影响了产品的外观质量,还可能对后续装配过程造成不利影响,甚至降低产品的使用寿命。因此,在产品出厂前进行有效的去毛刺处理是十分必要的。
2、现有技术中通常依赖于人工调整或者简单的机械定位装置来确定工件与打磨工具之间的相对位置,虽然能够在一定程度上满足基本需求,但由于缺乏精确的位置控制机制,导致实际操作中经常出现定位偏差。
3、例如,当面对形状复杂或多变的工件时,很难保证每次都能将工件放置在完全相同的位置;即使对于规则形状的工件而言,由于固定夹具本身的制造误差以及长时间使用后可能出现的磨损等问题,也难以长期保持良好的重复定位精度。此外,在连续生产线上快速更换不同规格型号的产品时,频繁调整设备参数也会增加出错几率。
技术实现思路
1、本发明提供一种去毛刺方法和去毛刺装置,用以解决现有技术中定位不准确导致的去毛刺效果不佳的缺陷,实现更加精确、高效的去毛刺作业。
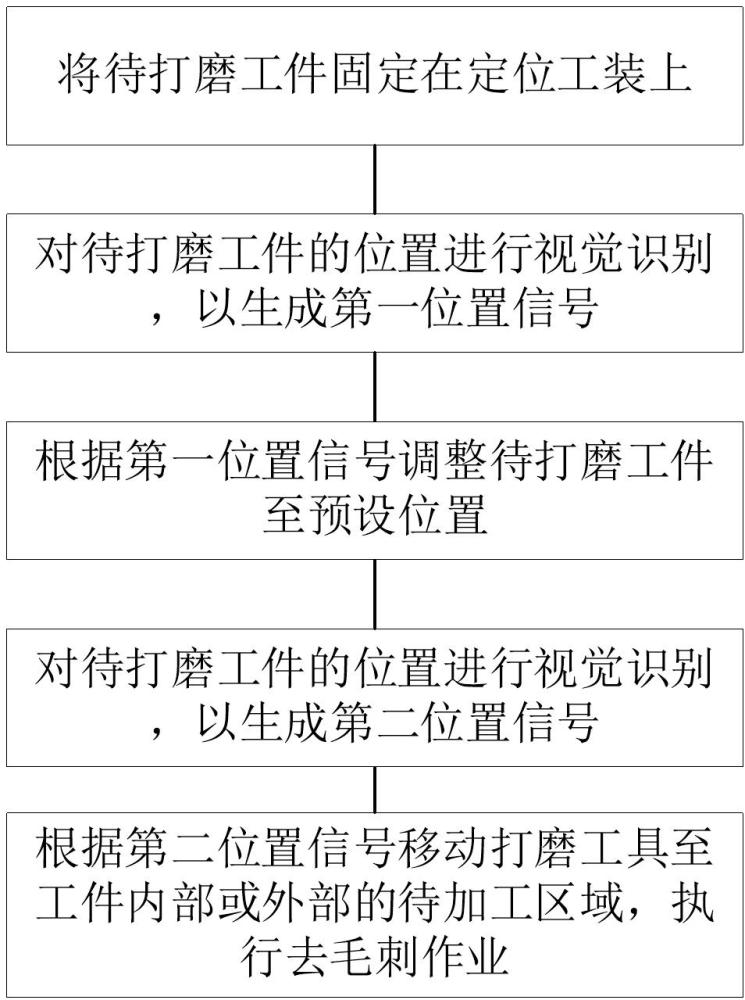
2、本发明提供一种去毛刺方法,包括:将待打磨工件固定在定位工装上;对所述待打磨工件的位置进行视觉识别,以生成第一位置信号;根据所述第一位置信号调整待打磨工件至预设位置;对所述待打磨工件的位置进行视觉识别,以生成第二位置信号;根据所述第二位置信号移动打磨工具至工件内部或外部的待加工区域,执行去毛刺作业。
3、根据本发明的一种去毛刺方法,所述执行去毛刺作业的步骤还包括:实时监测并反馈所述打磨工具的受力数据;根据所述受力数据控制所述打磨工具的打磨力度。
4、根据本发明的一种去毛刺方法,所述对所述待打磨工件的位置进行视觉识别的步骤还包括:识别所述待打磨工件的工件类型;根据所述工件类型选择相应的自动打磨程序,并设定执行去毛刺作业过程中的打磨接触力。
5、根据本发明的一种去毛刺方法,所述执行去毛刺作业的步骤之后还包括:调整所述待打磨工件的定位角度;对所述待打磨工件的位置进行视觉识别,以生成新的所述第二位置信号;根据所述第二位置信号移动所述打磨工具至工件内部或外部的待加工区域,执行去毛刺作业。
6、本发明还提供一种去毛刺装置,用以执行如上任一种实施方式所述的去毛刺方法,装置包括:机器人,所述机器人的移动端配置有电主轴,用于装载打磨工具;视觉相机,安装于所述移动端的一侧,用于待打磨工件的位置识别;定位工装,设置于所述机器人的一侧,用于定位安装所述待打磨工件。
7、根据本发明的一种去毛刺装置,所述机器人的所述移动端设置有多维力传感器;所述多维力传感器与所述电主轴同轴设置,用于在多个方向上实时监测所述电主轴收到的径向力。
8、根据本发明的一种去毛刺装置,所述定位工装设置有变位机构和夹持机构;所述夹持机构用于夹持所述待打磨工件;所述变位机构设置于所述定位工装与所述夹持机构之间,用于驱动所述夹持机构相对于所述定位工装旋转或移动。
9、根据本发明的一种去毛刺装置,所述夹持机构可拆卸的安装于所述定位工装;基于多种类型的所述待打磨工件,所述去毛刺装置备有多种与所述待打磨工件相适应的所述夹持机构。
10、根据本发明的一种去毛刺装置,所述机器人包括:基座,连接于供电线路和控制线路;旋转座,绕竖直轴线旋转安装于所述基座;第一摆臂,所述第一摆臂的首端绕第一水平轴线旋转安装于所述旋转座;第二摆臂,所述第二摆臂的首端绕第二水平轴线旋转安装于所述第一摆臂的末端;作业臂,旋转安装于所述第二摆臂的末端,所述移动端摆动安装于所述作业臂。
11、根据本发明的一种去毛刺装置,包括以下结构中的一种或多种:刀架,设置在所述机器人的一侧,用于存放多种所述打磨工具;滤网,位于所述定位工装下方,用于收集废屑;供液机构,位于所述定位工装下方,用于提供冷却液;设备外壳,其内部形成有作业空间,所述去毛刺装置集成设置于所述作业空间内。
12、本发明提供的去毛刺方法和去毛刺装置,通过将待打磨工件固定在定位工装上,并利用视觉识别技术对待打磨工件的位置进行精确识别与调整,从而解决了现有技术中定位不准确导致的去毛刺效果不佳的问题。首先,视觉识别系统生成第一位置信号,根据该信号自动调整待打磨工件至预设位置,确保所有工件在开始去毛刺前都处于相同的参考坐标系内。接着,再次使用视觉识别系统生成第二位置信号,以更精确地确定工件上的特定区域或特征点。基于这些高精度的位置信息,控制系统能够指挥打磨工具精准移动到工件内部或外部的待加工区域,执行高效而准确的去毛刺作业。上述去毛刺方法以及应用该方法的去毛刺装置,不仅提高了去毛刺过程中的定位精度,还提升了整体作业的一致性和效率,实现了更加精细、可靠且高效的去毛刺效果。
技术特征:
1.一种去毛刺方法,其特征在于,包括:
2.根据权利要求1所述的去毛刺方法,其特征在于,所述执行去毛刺作业的步骤还包括:
3.根据权利要求1所述的去毛刺方法,其特征在于,所述对所述待打磨工件的位置进行视觉识别的步骤还包括:
4.根据权利要求1至3中的任意一项所述的去毛刺方法,其特征在于,所述执行去毛刺作业的步骤之后还包括:
5.一种去毛刺装置,其特征在于,用以执行权利要求1至4中的任意一项所述的去毛刺方法,装置包括:
6.根据权利要求5所述的去毛刺装置,其特征在于,所述机器人(10)的所述移动端(11)设置有多维力传感器(15);
7.根据权利要求5所述的去毛刺装置,其特征在于,所述定位工装(20)设置有变位机构和夹持机构;
8.根据权利要求7所述的去毛刺装置,其特征在于,所述夹持机构可拆卸的安装于所述定位工装(20);
9.根据权利要求5至8中的任意一项所述的去毛刺装置,其特征在于,所述机器人(10)包括:
10.根据权利要求5至8中的任意一项所述的去毛刺装置,其特征在于,包括以下结构中的一种或多种:
技术总结
本发明涉及机械加工技术领域,尤其涉及一种去毛刺方法和去毛刺装置,去毛刺方法包括:将待打磨工件固定在定位工装上;对待打磨工件的位置进行视觉识别,以生成第一位置信号;根据第一位置信号调整待打磨工件至预设位置;对待打磨工件的位置进行视觉识别,以生成第二位置信号;根据第二位置信号移动打磨工具至工件内部或外部的待加工区域,执行去毛刺作业。本方案用以解决现有技术中定位不准确导致的去毛刺效果不佳的缺陷,实现更加精确、高效的去毛刺作业。
技术研发人员:薛同均,张革玉,李博阳,刘重阳,都屹凡,杨世忠,王新齐,樊宏升,马浩文
受保护的技术使用者:北京天玛智控科技股份有限公司
技术研发日:
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!