智能给汤机的制作方法
本申请涉及挤压铸造技术的领域,尤其是涉及一种智能给汤机。
背景技术:
1、在挤压铸造中,铸造设备与坩埚炉是分离的状态,需要通过给汤机将金属熔汤(铝合金熔汤)从坩埚炉内注入到铸造设备,具体步骤为:给汤机的机械手移动,机械手带动汤勺移动至铝合金熔汤液面,之后汤勺转动以舀一勺铝合金熔汤。在机械手带动汤勺移动至铝合金熔汤液面时,机械手上会有传感器感应液面,传感器感应到液面后,传感器会发出信号并通过控制器使机械手停止移动,此时使汤勺转动以舀一勺铝合金熔汤,在传感器发生故障时,机械手未能及时停止移动,从而使机械手伸入熔汤内而损坏机械手,并污染熔汤,有待改进。
技术实现思路
1、为了使给汤机的机械手能及时停于液面上方,本申请提供一种智能给汤机。
2、本申请提供的一种智能给汤机,采用如下的技术方案:
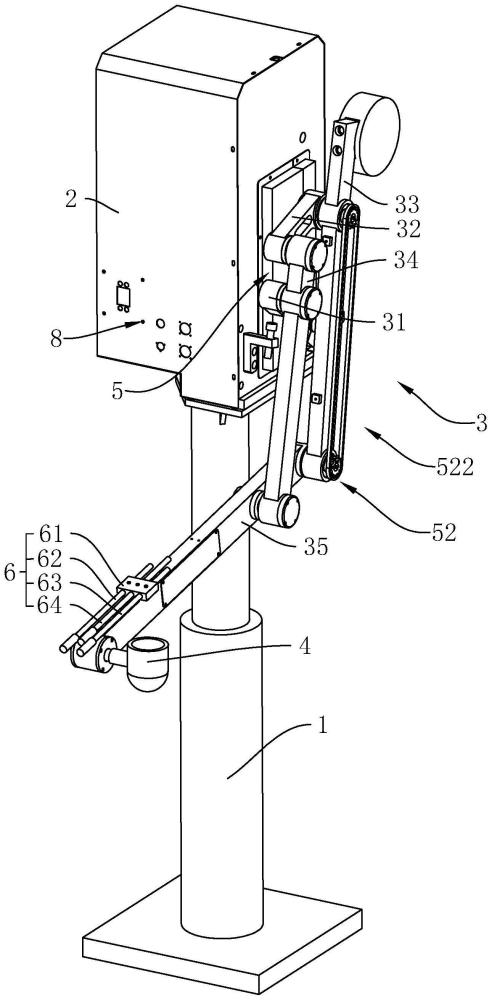
3、一种智能给汤机,包括底座、设置于底座上的安装箱、设置于安装箱上的机械手、设置于机械手上的汤勺、设置于安装箱上的驱动组件和设置于机械手上检测组件,所述驱动组件用于驱动机械手移动并驱使汤勺转动;所述检测组件包括安装座、设置于安装座上的第一传感器、设置于安装座上的第二传感器和设置于安装座上的第三传感器,所述第一传感器和第二传感器的底端相平齐,所述第三传感器的底端位于第一传感器的底端的上方,所述第三传感器的底端与第一传感器的底端之间的距离为1.5-2.5cm;所述安装座上设有控制器,所述控制器用于控制驱动组件是否工作,所述控制器与第三传感器电连接。
4、通过采用上述技术方案,驱动组件驱使机械手移动以带动汤勺移动至铝合金熔液处,此时驱动组件再驱使汤勺转动以取料,在汤勺移动至铝合金熔液处时,第一传感器作为主要的感应元件感应汤勺是否到达指定位置,若第一传感器损坏,第二传感器同样可感应汤勺位置,双重保险(第一传感器和第二传感器以感应为目的),若第一传感器和第二传感器均损坏,第三传感器在机械手即将伸入熔液时向控制器发出信号以使给汤机停止运作(第三传感器以保护为目的,正常情况下第三传感器不会向控制器发出电信号)。
5、可选的,所述驱动组件包括第一驱动电机和取料组件,所述第一驱动电机设置于安装箱内,所述第一驱动电机用于驱动机械手移动以带动汤勺移动;所述取料组件包括第二驱动电机和传动组件,所述汤勺转动连接于机械手上,所述第二驱动电机设置于安装箱内,所述第二驱动电机用于驱动传动组件运作以带动汤勺转动。
6、通过采用上述技术方案,设置第一驱动电机驱动机械手移动以带动汤勺至铝合金熔液处,之后通过第二驱动电机使传动组件带动汤勺转动以取料。
7、可选的,所述安装箱上设有两个减速箱,所述减速箱分别与第一驱动电机和第二驱动电机连接。
8、通过采用上述技术方案,设置减速箱降低第一驱动电机和第二驱动电机的转速,使电机转速适当。
9、可选的,所述机械手包括第一连接杆、第二连接杆、第一臂体、第二臂体和取汤杆,所述第一连接杆和第二连接杆的两端均分别与第一臂体和第二臂体连接,所述第一臂体和第二臂体远离第一连接杆的一端均与取汤杆连接,两个所述减速箱的输出轴分别与第一连接杆和第二连接杆的端部连接,且相连接的端部为第一连接杆和第二连接杆与第一臂体连接的端部。
10、通过采用上述技术方案,在第一驱动电机转动时,第二连接杆沿其端部为转动轴转动,以带动第二臂体移动,此时第一连接杆和第一臂体被带动,从而使底部的取汤杆被带动以使汤勺移动至铝合金熔液处。
11、可选的,所述传动组件包括第一齿轮、第二齿轮、第三齿轮、第四齿轮、第一齿链和第二齿链,所述第一齿轮和与第二驱动电机的输出轴相连接的减速箱的输出轴同轴固定,所述第二齿轮和第三齿轮位于第一臂体远离第一齿轮的端部,且所述第二齿轮和第三齿轮位于第一臂体的两侧,所述第三齿轮位于取汤杆内,所述第二齿轮和第三齿轮同轴固定,所述第四齿轮位于取汤杆远离第三齿轮的端部,所述第四齿轮与汤勺同轴固定,所述第一齿链与第一齿轮和第二齿轮相啮合,所述第二齿链与第三齿轮和第四齿轮相啮合。
12、通过采用上述技术方案,需要取料时,第二驱动电机驱使第一齿轮转动,从而带动第一齿链移动以带动第二齿轮转动,第二齿轮和第三齿轮同轴固定,从而第三齿轮在第二齿轮转动使同时转动,以驱使第二齿链移动从而带动第四齿轮转动,最终使汤勺转动以取料。
13、可选的,所述控制器与第二驱动电机电连接;所述第一传感器和第二传感器均与控制器电连接。
14、通过采用上述技术方案,控制器可收到第一传感器和第二传感器的信号以了解机械手(取汤杆)的位置并在取汤杆靠近液面时使机械手停止移动,从而在收到信号后使第二驱动电机运作以使传动组件带动汤勺转动以取料,取料完毕后第二驱动电机停止运作。
15、可选的,所述安装箱的侧壁上开设有散热孔。
16、通过采用上述技术方案,设置散热孔供电机散热,提高散热性能。
17、可选的,所述安装箱设有门体,所述门体封闭安装箱。
18、通过采用上述技术方案,设置门体将电机隔绝于安装箱内,防止电机受外界高温和灰尘等因素的影响。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1.驱动组件驱使机械手移动以带动汤勺移动至铝合金熔液处,此时驱动组件再驱使汤勺转动以取料,在汤勺移动至铝合金熔液处时,第一传感器作为主要的感应元件感应汤勺是否到达指定位置,若第一传感器损坏,第二传感器同样可感应汤勺位置,双重保险(第一传感器和第二传感器以感应为目的),若第一传感器和第二传感器均损坏,第三传感器在机械手即将伸入熔液时向控制器发出信号以使给汤机停止运作(第三传感器以保护为目的,正常情况下第三传感器不会向控制器发出电信号);
21、2.需要取料时,第二驱动电机驱使第一齿轮转动,从而带动第一齿链移动以带动第二齿轮转动,第二齿轮和第三齿轮同轴固定,从而第三齿轮在第二齿轮转动使同时转动,以驱使第二齿链移动从而带动第四齿轮转动,最终使汤勺转动以取料;
22、3.设置散热孔供电机散热,提高散热性能。
技术特征:
1.一种智能给汤机,其特征在于:包括底座(1)、设置于底座(1)上的安装箱(2)、设置于安装箱(2)上的机械手(3)、设置于机械手(3)上的汤勺(4)、设置于安装箱(2)上的驱动组件(5)和设置于机械手(3)上检测组件(6),所述驱动组件(5)用于驱动机械手(3)移动并驱使汤勺(4)转动;所述检测组件(6)包括安装座(61)、设置于安装座(61)上的第一传感器(62)、设置于安装座(61)上的第二传感器(63)和设置于安装座(61)上的第三传感器(64),所述第一传感器(62)和第二传感器(63)的底端相平齐,所述第三传感器(64)的底端位于第一传感器(62)的底端的上方,所述第三传感器(64)的底端与第一传感器(62)的底端之间的距离为1.5-2.5cm;所述安装座(61)上设有控制器,所述控制器用于控制驱动组件(5)是否工作,所述控制器与第三传感器(64)电连接。
2.根据权利要求1所述的智能给汤机,其特征在于:所述驱动组件(5)包括第一驱动电机(51)和取料组件(52),所述第一驱动电机(51)设置于安装箱(2)内,所述第一驱动电机(51)用于驱动机械手(3)移动以带动汤勺(4)移动;所述取料组件(52)包括第二驱动电机(521)和传动组件(522),所述汤勺(4)转动连接于机械手(3)上,所述第二驱动电机(521)设置于安装箱(2)内,所述第二驱动电机(521)用于驱动传动组件(522)运作以带动汤勺(4)转动。
3.根据权利要求2所述的智能给汤机,其特征在于:所述安装箱(2)上设有两个减速箱(7),所述减速箱(7)分别与第一驱动电机(51)和第二驱动电机(521)连接。
4.根据权利要求3所述的智能给汤机,其特征在于:所述机械手(3)包括第一连接杆(31)、第二连接杆(32)、第一臂体(33)、第二臂体(34)和取汤杆(35),所述第一连接杆(31)和第二连接杆(32)的两端均分别与第一臂体(33)和第二臂体(34)连接,所述第一臂体(33)和第二臂体(34)远离第一连接杆(31)的一端均与取汤杆(35)连接,两个所述减速箱(7)的输出轴分别与第一连接杆(31)和第二连接杆(32)的端部连接,且相连接的端部为第一连接杆(31)和第二连接杆(32)与第一臂体(33)连接的端部。
5.根据权利要求4所述的智能给汤机,其特征在于:所述传动组件(522)包括第一齿轮(5221)、第二齿轮(5222)、第三齿轮(5223)、第四齿轮(5224)、第一齿链(5225)和第二齿链(5226),所述第一齿轮(5221)和与第二驱动电机(521)的输出轴相连接的减速箱(7)的输出轴同轴固定,所述第二齿轮(5222)和第三齿轮(5223)位于第一臂体(33)远离第一齿轮(5221)的端部,且所述第二齿轮(5222)和第三齿轮(5223)位于第一臂体(33)的两侧,所述第三齿轮(5223)位于取汤杆(35)内,所述第二齿轮(5222)和第三齿轮(5223)同轴固定,所述第四齿轮(5224)位于取汤杆(35)远离第三齿轮(5223)的端部,所述第四齿轮(5224)与汤勺(4)同轴固定,所述第一齿链(5225)与第一齿轮(5221)和第二齿轮(5222)相啮合,所述第二齿链(5226)与第三齿轮(5223)和第四齿轮(5224)相啮合。
6.根据权利要求5所述的智能给汤机,其特征在于:所述控制器与第二驱动电机(521)电连接;所述第一传感器(62)和第二传感器(63)均与控制器电连接。
7.根据权利要求1所述的智能给汤机,其特征在于:所述安装箱(2)的侧壁上开设有散热孔(8)。
8.根据权利要求1所述的智能给汤机,其特征在于:所述安装箱(2)设有门体(9),所述门体(9)封闭安装箱(2)。
技术总结
本申请涉及一种智能给汤机,其包括底座、设置于底座上的安装箱、设置于安装箱上的机械手、设置于机械手上的汤勺、设置于安装箱上的驱动组件和设置于机械手上检测组件,驱动组件用于驱动机械手移动并驱使汤勺转动;检测组件包括安装座、设置于安装座上的第一传感器、设置于安装座上的第二传感器和设置于安装座上的第三传感器,第一传感器和第二传感器的底端相平齐,第三传感器的底端位于第一传感器的底端的上方,第三传感器的底端与第一传感器的底端之间的距离为1.5‑2.5cm;安装座上设有控制器,控制器用于控制驱动组件是否工作,控制器与第三传感器电连接。本申请具有使给汤机的机械手能及时停于液面上方的效果,并自动取料给料。
技术研发人员:陈升
受保护的技术使用者:台州市亿昌机电设备有限公司
技术研发日:20240529
技术公布日:2025/3/13
- 还没有人留言评论。精彩留言会获得点赞!