一种机器人自动打磨车体的装备及其操作方法与流程
本发明涉及打磨设备,尤其是涉及一种机器人自动打磨车体的装备及其操作方法。
背景技术:
1、城轨车,指城市内高载客量的铁路车辆,即是城市轨道交通使用的铁路车辆,城轨车辆车外侧墙、端墙及车顶侧圆弧区域腻子打磨,动车组车辆车外侧墙及车顶侧圆弧区域腻子打磨时需要使用到机器人进行自动打磨。
2、现有的专利(公告号:cn114800171b)公开了一种机器人自动打磨车体侧墙蒙皮焊缝的装备与方法,属于工业机器人自动加工应用技术领域。该装备包括机器人、打磨头模块和列车车体工件,打磨加工包括:列车车体侧墙蒙皮焊缝特征曲线的提取、打磨加工轨迹规划、生成机器人可识别的轨迹程序文件,打磨工具与工件坐标系的标定。在实现本方案的过程中发现现有技术中存在如下问题,没有得到良好的解决:该装置在使用时通过打磨头模块对车体进行打磨时容易产生较多粉尘,部分粉尘通过吸尘设备进行收集,然而车体经过打磨后其表面依旧容易附着粉尘。
技术实现思路
1、为了改善上述提到的该装置在使用时通过打磨头模块对车体进行打磨时容易产生较多粉尘,部分粉尘通过吸尘设备进行收集,然而车体经过打磨后其表面依旧容易附着粉尘的问题,本发明提供一种机器人自动打磨车体的装备及其操作方法。
2、本发明提供一种机器人自动打磨车体的装备及其操作方法,采用如下的技术方案:
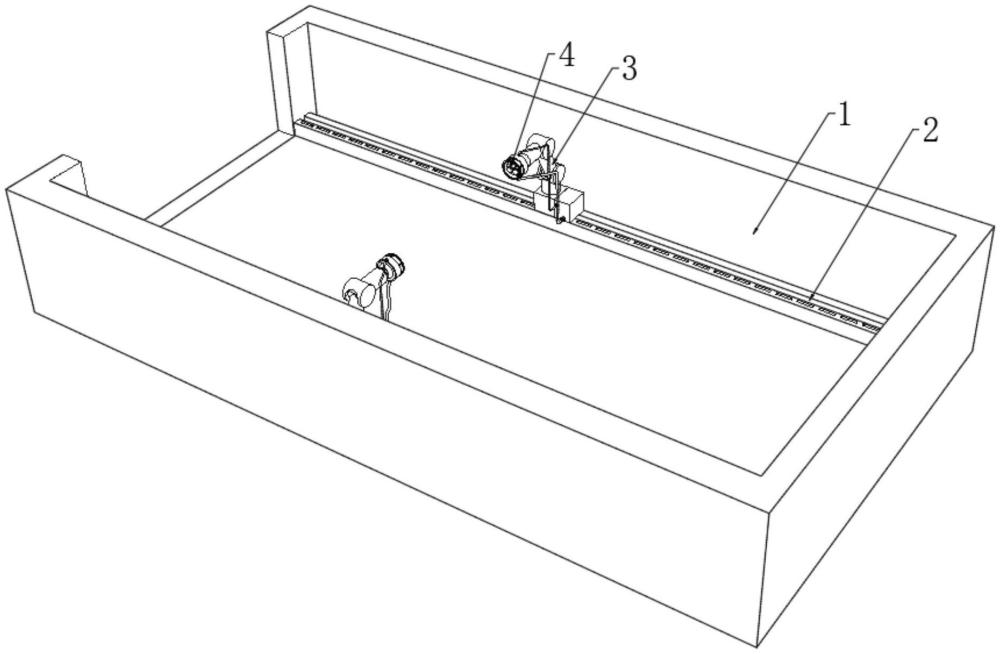
3、一种机器人自动打磨车体的装备,包括工位封闭防护装置,所述工位封闭防护装置的内底壁设置有两个行走轴,两个所述行走轴上均活动设置有打磨机器人,所述打磨机器人的顶端设置有全自动打磨设备,所述全自动打磨设备的外壁固定套设有喷气件,所述喷气件的侧壁固定设置有伸缩式集尘套,所述打磨机器人底座的侧壁固定设置有吸尘器,所述吸尘器的进气端通过设置吸尘管与伸缩式集尘套连通,所述吸尘器的出气端通过设置排气管与喷气件连通。
4、通过上述技术方案,通过打磨机器人控制全自动打磨设备移动并与车体贴合,随即通过全自动打磨设备运转不断对车体进行打磨,同时通过伸缩式集尘套对打磨产生的粉尘进行收集,并通过吸尘器与吸尘管配合对伸缩式集尘套内的粉尘进行抽取。
5、可选的,上述一种机器人自动打磨车体的装备中,所述打磨机器人的底面设置有限位块,所述限位块位于行走轴内并与行走轴的内壁滑动配合,所述打磨机器人的底面设置有电动滚轮。
6、可选的,上述一种机器人自动打磨车体的装备中,所述全自动打磨设备包括电机与三头打磨机,所述电机固定设置在打磨机器人的顶端,所述三头打磨机固定设置在电机的转动轴上。
7、可选的,上述一种机器人自动打磨车体的装备中,所述三头打磨机包括机壳,所述机壳的内部设置有三个电动推杆,所述电动推杆的伸出端固定设置有电动打磨头。
8、可选的,上述一种机器人自动打磨车体的装备中,所述喷气件的内部开设有空腔,所述喷气件朝向伸缩式集尘套的一侧设置有若干个喷嘴,所述喷嘴与空腔连通。
9、可选的,上述一种机器人自动打磨车体的装备中,所述伸缩式集尘套包括圆管与活动管,所述圆管固定设置在喷气件的侧面,所述活动管活动插接在圆管的内壁,所述活动管伸出圆管的一端通过设置若干个第一弹簧与圆管远离喷气件的一端相连接,所述活动管伸出圆管的一端设置有若干个滚珠。
10、可选的,上述一种机器人自动打磨车体的装备中,所述吸尘器的内部设置有滤尘板,所述吸尘器的内部设置有静电消除器。
11、可选的,上述一种机器人自动打磨车体的装备中,所述吸尘器的底面活动插接有活动杆,所述活动杆的上端插入吸尘器内并固定设置有刮板,所述刮板与滤尘板的外壁滑动配合,所述行走轴的顶面开设有若干个凹陷,所述活动杆的下端与凹陷的内壁活动配合。
12、可选的,上述一种机器人自动打磨车体的装备中,所述活动杆的下端通过设置第二弹簧与吸尘器的内底壁相连接。
13、本发明提出的另一种技术方案:一种机器人自动打磨车体的装备及其操作方法,包括以下步骤:
14、s101:首先由专用牵引装置将车体移动至工位封闭防护装置内,并在工位封闭防护装置内安装机械止挡定位,在车体相应减速位置和停止位置划线,提醒司机减速和停止车体的运送,再通过机械止挡,使车体固定在停放位置上;
15、s102:通过打磨机器人系统中的车身寻位检测功能,自动检测车身前部与车身侧部的位置,并与系统里存储的数据进行比较,判断车身是否摆在,如有偏差,机器人系统自动纠正轨迹进行打磨作业;
16、s103:随即通过打磨机器人控制全自动打磨设备移动并与车体贴合,随即通过全自动打磨设备运转不断对车体进行打磨,同时通过伸缩式集尘套对打磨产生的粉尘进行收集,并通过吸尘器与吸尘管配合对伸缩式集尘套内的粉尘进行抽取;
17、s104:通过吸尘器与排气管配合将过滤后的气体输送至喷气件内,随即通过喷气件喷射气流对车体上附着的粉尘进行吹扫,同时通过吸尘器与吸尘管配合对飘散的粉尘进行收集;
18、s105:打磨机器人沿着行走轴不断行走,直到车体完全被打磨,此时打磨机器人停止运行,并将工位封闭防护装置的安全门锁打开,随即通过专用牵引装置将车体从工位封闭防护装置内牵引出来。
19、综上所述,本发明包括以下至少一种有益效果:
20、通过吸尘器与排气管配合将过滤后的气体输送至喷气件内,随即通过喷气件喷射气流对车体上附着的粉尘进行吹扫,同时通过吸尘器与吸尘管配合对飘散的粉尘进行收集,从而减少车体表面残留的粉尘;
21、当活动杆移动至凹陷内时,活动杆失去推力并带动刮板下移,当活动杆与凹陷分离时,活动杆受到推力调动刮板上移,从而通过刮板对滤尘板表面附着的粉尘进行刮扫。
技术特征:
1.一种机器人自动打磨车体的装备,包括工位封闭防护装置(1),其特征在于:所述工位封闭防护装置(1)的内底壁设置有两个行走轴(2),两个所述行走轴(2)上均活动设置有打磨机器人(3),所述打磨机器人(3)的顶端设置有全自动打磨设备(4),所述全自动打磨设备(4)的外壁固定套设有喷气件(5),所述喷气件(5)的侧壁固定设置有伸缩式集尘套(6),所述打磨机器人(3)底座的侧壁固定设置有吸尘器(7),所述吸尘器(7)的进气端通过设置吸尘管(8)与伸缩式集尘套(6)连通,所述吸尘器(7)的出气端通过设置排气管(9)与喷气件(5)连通。
2.根据权利要求1所述的机器人自动打磨车体的装备,其特征在于:所述打磨机器人(3)的底面设置有限位块(31),所述限位块(31)位于行走轴(2)内并与行走轴(2)的内壁滑动配合,所述打磨机器人(3)的底面设置有电动滚轮。
3.根据权利要求1所述的机器人自动打磨车体的装备,其特征在于:所述全自动打磨设备(4)包括电机(41)与三头打磨机(42),所述电机(41)固定设置在打磨机器人(3)的顶端,所述三头打磨机(42)固定设置在电机(41)的转动轴上。
4.根据权利要求3所述的机器人自动打磨车体的装备,其特征在于:所述三头打磨机(42)包括机壳(421),所述机壳(421)的内部设置有三个电动推杆(422),所述电动推杆(422)的伸出端固定设置有电动打磨头(423)。
5.根据权利要求1所述的机器人自动打磨车体的装备,其特征在于:所述喷气件(5)的内部开设有空腔(51),所述喷气件(5)朝向伸缩式集尘套(6)的一侧设置有若干个喷嘴(52),所述喷嘴(52)与空腔(51)连通。
6.根据权利要求1所述的机器人自动打磨车体的装备,其特征在于:所述伸缩式集尘套(6)包括圆管(61)与活动管(62),所述圆管(61)固定设置在喷气件(5)的侧面,所述活动管(62)活动插接在圆管(61)的内壁,所述活动管(62)伸出圆管(61)的一端通过设置若干个第一弹簧(63)与圆管(61)远离喷气件(5)的一端相连接,所述活动管(62)伸出圆管(61)的一端设置有若干个滚珠(64)。
7.根据权利要求1所述的机器人自动打磨车体的装备,其特征在于:所述吸尘器(7)的内部设置有滤尘板(71),所述吸尘器(7)的内部设置有静电消除器(72)。
8.根据权利要求7所述的机器人自动打磨车体的装备,其特征在于:所述吸尘器(7)的底面活动插接有活动杆(73),所述活动杆(73)的上端插入吸尘器(7)内并固定设置有刮板(74),所述刮板(74)与滤尘板(71)的外壁滑动配合,所述行走轴(2)的顶面开设有若干个凹陷(21),所述活动杆(73)的下端与凹陷(21)的内壁活动配合。
9.根据权利要求8所述的机器人自动打磨车体的装备,其特征在于:所述活动杆(73)的下端通过设置第二弹簧(75)与吸尘器(7)的内底壁相连接。
10.一种如权利要求1-9任意一项所述的机器人自动打磨车体的装备的操作方法,包括以下步骤:
技术总结
本发明公开了一种机器人自动打磨车体的装备及其操作方法,涉及打磨设备技术领域,包括工位封闭防护装置,所述工位封闭防护装置的内底壁设置有两个行走轴,两个所述行走轴上均活动设置有打磨机器人,所述打磨机器人的顶端设置有全自动打磨设备,所述全自动打磨设备的外壁固定套设有喷气件。本发明通过吸尘器与排气管配合将过滤后的气体输送至喷气件内,随即通过喷气件喷射气流对车体上附着的粉尘进行吹扫,同时通过吸尘器与吸尘管配合对飘散的粉尘进行收集,从而减少车体表面残留的粉尘;当活动杆移动至凹陷内时,活动杆失去推力并带动刮板下移,当活动杆与凹陷分离时,活动杆受到推力调动刮板上移,从而通过刮板对滤尘板表面附着的粉尘进行刮扫。
技术研发人员:张湘菊,魏瑞霞,孟鹤,张梦樵,金雨楠,汤泽熙
受保护的技术使用者:中车南京浦镇车辆有限公司
技术研发日:
技术公布日:2025/4/10
- 还没有人留言评论。精彩留言会获得点赞!