一种槽棒自动斜粘钉机器人的制作方法
本发明涉及半导体石英制品加工,具体涉及一种槽棒自动斜粘钉机器人。
背景技术:
1、众所周知,槽棒自动粘钉是将石英钉粘接在槽棒上,在粘钉过程中,需要将石英灯置于槽棒和石英钉的底部,通过石英灯将槽棒和石英钉的端部烧熔后进行粘接。
2、但是,石英灯在烘烤过程中,由于槽棒和石英钉的端部都是底部受热,导致槽棒和石英钉的端部受热不均,影响槽棒和石英钉的熔化和粘接效果。
技术实现思路
1、针对现有技术中的缺陷,本发明提供的一种槽棒自动斜粘钉机器人,不仅有利于聚集石英灯的热量,而且,能够提高石英棒和石英钉端部的熔化效果和粘接效果。
2、为了解决上述技术问题,本发明提出以下技术方案:
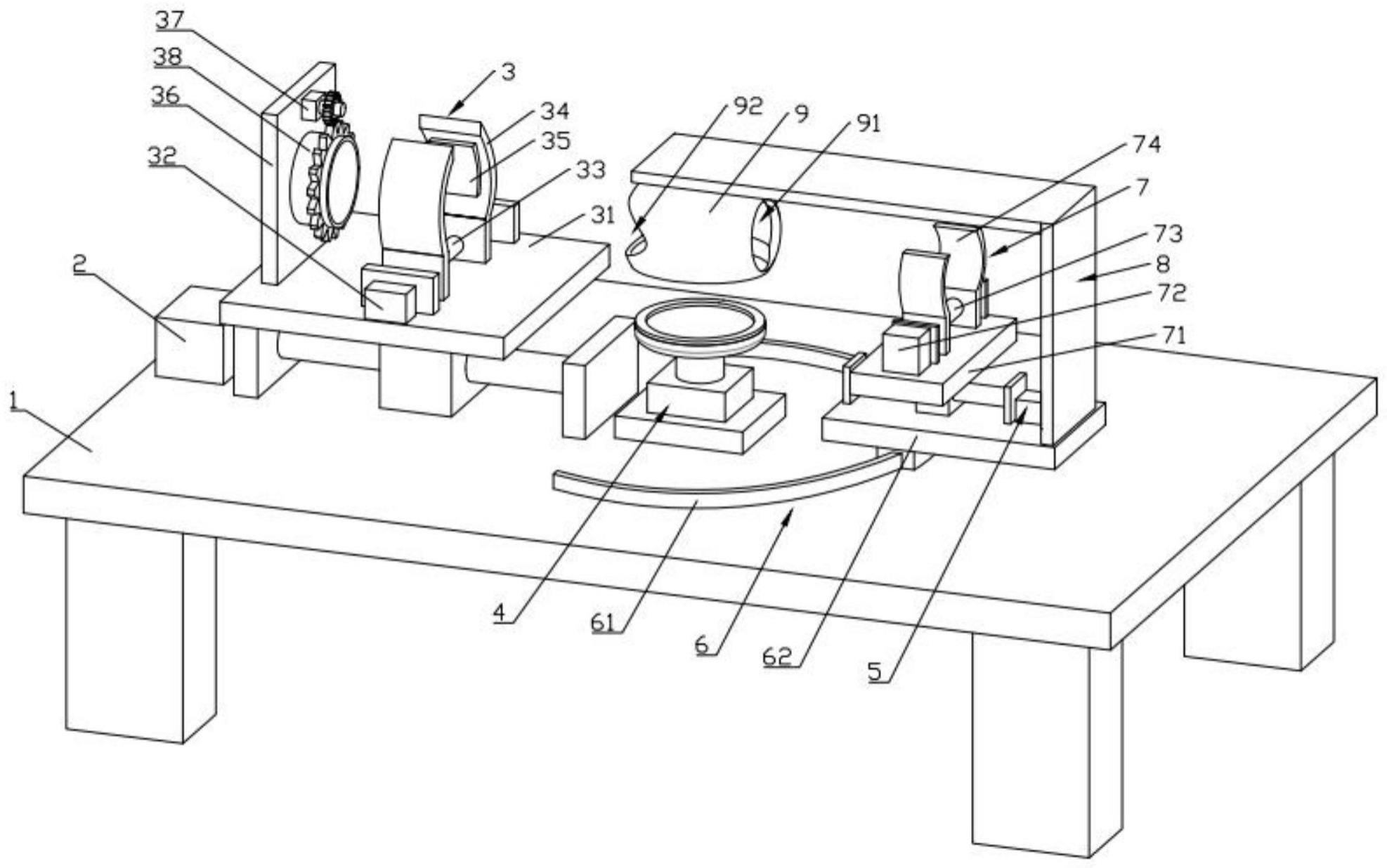
3、一种槽棒自动斜粘钉机器人,包括支撑台,支撑台的中间区域固定安装有用于放置石英灯的升降台,支撑台的一侧设有石英棒夹持装置和用于驱动石英棒夹持装置直线运动的第一驱动装置,第一驱动装置固定安装在支撑台上,支撑台的另一侧设有石英钉夹持装置、用于驱动石英钉夹持装置直线运动的第二驱动装置以及用于驱动第二驱动装置弧线运动的第三驱动装置,第三驱动装置固定安装在支撑台上,第三驱动装置上固定安装有支撑架,支撑架上固定安装有聚热罩,聚热罩位于升降台的正上方。
4、进一步地,所述石英棒夹持装置包括第一固定板,第一固定板与第一驱动装置驱动连接,第一固定板上设有第一驱动电机和第一双向螺杆,第一驱动电机与第一固定板固定连接,第一双向螺杆与第一固定板转动连接,第一驱动电机与第一双向螺杆驱动连接,第一双向螺杆的两个螺纹段上均螺纹连接有第一夹持片,第一夹持片的底端与第一固定板滑动连接。
5、进一步地,所述第一夹持片的内侧面滑动连接夹持块,第一固定板上固定安装有竖板,竖板上设有固定筒和第二驱动电机,第二驱动电机与第一固定板固定连接,固定筒与第一固定板转动连接,第二驱动电机通过齿轮组与固定筒驱动连接。
6、进一步地,所述第三驱动装置包括弧形导轨和第三驱动组件,弧形导轨和第三驱动组件均与支撑台固定连接,弧形导轨上滑动连接有第二固定板,第三驱动组件与第二固定板驱动连接,支撑架和第二驱动装置均固定安装有第二固定板上。
7、进一步地,所述石英棒夹持装置包括第三固定板、第三驱动电机和第二双向螺杆,第三固定板与第二驱动装置驱动连接,第三驱动电机与第三固定板固定连接,第二双向螺杆与第三固定板转动连接,第三驱动电机与第二双向螺杆驱动连接,第二双向螺杆的两个螺纹段上均螺纹连接有第二夹持片,第二夹持片的底端与第三固定板滑动连接。
8、进一步地,所述聚热罩为半球形,聚热罩靠近石英钉夹持装置的一侧开设有供石英钉穿过的第一通孔,聚热罩靠近石英棒夹持装置的一侧开设有供石英棒穿过的第二通孔。
9、进一步地,所述第二通孔为椭圆形。
10、由上述技术方案可知,本发明的有益效果:将石英灯放置在升降台上,通过石英棒夹持装置夹持石英棒,通过石英钉夹持装置夹持石英钉,通过第一驱动装置驱动石英棒夹持装置移动,通过第二驱动装置驱动石英钉夹持装置移动,使石英棒和石英钉相向运动,并使石英棒的端部和石英钉的端部均位于石英灯的正上方且位于聚热罩的正下方,同时,升降台升高,使石英灯上升直到石英棒的端部和石英灯的端部处于石英灯的烘烤范围内,聚热罩的设置不仅有利于聚集石英灯的热量,减少热量损失,而且,能够使石英棒和石英钉的端部均匀受热,提高石英棒和石英钉端部的熔化效果和粘接效果,另外,第三驱动装置带动石英钉和聚热罩同步转动,改变石英钉与石英棒的粘接角度。
技术特征:
1.一种槽棒自动斜粘钉机器人,其特征在于:包括支撑台(1),支撑台(1)的中间区域固定安装有用于放置石英灯的升降台(4),支撑台(1)的一侧设有石英棒夹持装置(3)和用于驱动石英棒夹持装置(3)直线运动的第一驱动装置(2),第一驱动装置(2)固定安装在支撑台(1)上,支撑台(1)的另一侧设有石英钉夹持装置(7)、用于驱动石英钉夹持装置(7)直线运动的第二驱动装置(5)以及用于驱动第二驱动装置(5)弧线运动的第三驱动装置(6),第三驱动装置(6)固定安装在支撑台(1)上,第三驱动装置(6)上固定安装有支撑架(8),支撑架(8)上固定安装有聚热罩(9),聚热罩(9)位于升降台(4)的正上方。
2.根据权利要求1所述的一种槽棒自动斜粘钉机器人,其特征在于:所述石英棒夹持装置(3)包括第一固定板(31),第一固定板(31)与第一驱动装置(2)驱动连接,第一固定板(31)上设有第一驱动电机(32)和第一双向螺杆(33),第一驱动电机(32)与第一固定板(31)固定连接,第一双向螺杆(33)与第一固定板(31)转动连接,第一驱动电机(32)与第一双向螺杆(33)驱动连接,第一双向螺杆(33)的两个螺纹段上均螺纹连接有第一夹持片(34),第一夹持片(34)的底端与第一固定板(31)滑动连接。
3.根据权利要求2所述的一种槽棒自动斜粘钉机器人,其特征在于:所述第一夹持片(34)的内侧面滑动连接夹持块(35),第一固定板(31)上固定安装有竖板(36),竖板(36)上设有固定筒(38)和第二驱动电机(37),第二驱动电机(37)与第一固定板(31)固定连接,固定筒(38)与第一固定板(31)转动连接,第二驱动电机(37)通过齿轮组与固定筒(38)驱动连接。
4.根据权利要求1所述的一种槽棒自动斜粘钉机器人,其特征在于:所述第三驱动装置(6)包括弧形导轨(61)和第三驱动组件,弧形导轨(61)和第三驱动组件均与支撑台(1)固定连接,弧形导轨(61)上滑动连接有第二固定板(62),第三驱动组件与第二固定板(62)驱动连接,支撑架(8)和第二驱动装置(5)均固定安装有第二固定板(62)上。
5.根据权利要求1所述的一种槽棒自动斜粘钉机器人,其特征在于:所述石英棒夹持装置(3)包括第三固定板(71)、第三驱动电机(72)和第二双向螺杆(73),第三固定板(71)与第二驱动装置(5)驱动连接,第三驱动电机(72)与第三固定板(71)固定连接,第二双向螺杆(73)与第三固定板(71)转动连接,第三驱动电机(72)与第二双向螺杆(73)驱动连接,第二双向螺杆(73)的两个螺纹段上均螺纹连接有第二夹持片(74),第二夹持片(74)的底端与第三固定板(71)滑动连接。
6.根据权利要求1所述的一种槽棒自动斜粘钉机器人,其特征在于:所述聚热罩(9)为半球形,聚热罩(9)靠近石英钉夹持装置(7)的一侧开设有供石英钉穿过的第一通孔(91),聚热罩(9)靠近石英棒夹持装置(3)的一侧开设有供石英棒穿过的第二通孔(92)。
7.根据权利要求6所述的一种槽棒自动斜粘钉机器人,其特征在于:所述第二通孔(92)为椭圆形。
技术总结
本发明属于半导体石英制品加工技术领域,提供了一种槽棒自动斜粘钉机器人,包括支撑台,支撑台的中间区域固定安装有用于放置石英灯的升降台,支撑台的一侧设有石英棒夹持装置和用于驱动石英棒夹持装置直线运动的第一驱动装置,第一驱动装置固定安装在支撑台上,支撑台的另一侧设有石英钉夹持装置、用于驱动石英钉夹持装置直线运动的第二驱动装置以及用于驱动第二驱动装置弧线运动的第三驱动装置,第三驱动装置固定安装在支撑台上,第三驱动装置上固定安装有支撑架,支撑架上固定安装有聚热罩,聚热罩位于升降台的正上方。本发明的一种槽棒自动斜粘钉机器人,有利于聚集石英灯的热量,提高石英棒和石英钉端部的熔化效果和粘接效果。
技术研发人员:吕辉强
受保护的技术使用者:沈阳汉科半导体材料有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!