基于无机非金属材料成型的五轴机器人的制作方法
本发明涉及五轴机器人,具体为基于无机非金属材料成型的五轴机器人。
背景技术:
1、平台采用太阳光为熔覆能源,利用无机非金属粉体材料高温融结软硬件成套技术,五轴机器人涌入大众视野。
2、五轴机器人由手部、运动机构、控制系统三部分组成,自由度非常高,机械手灵敏性强,通用性大,运动机构的升降、伸缩、旋转等多个独立运动方式,备受消费者喜爱。
3、但是,传统的五轴机器人存在以下缺点:
4、(1)传统的五轴机器人结构固定不变,不便于使用者对其进行存放或者转移;
5、(2)传统的五轴机器人加工平台位置不变,不利于使用者对无机非金属材料进行加工。
技术实现思路
1、本发明的目的在于提供基于无机非金属材料成型的五轴机器人,以解决上述背景技术中提出的传统的五轴机器人结构固定不变,不便于使用者对其进行存放或者转移;传统的五轴机器人加工平台位置不变,不利于使用者对无机非金属材料进行加工的问题。
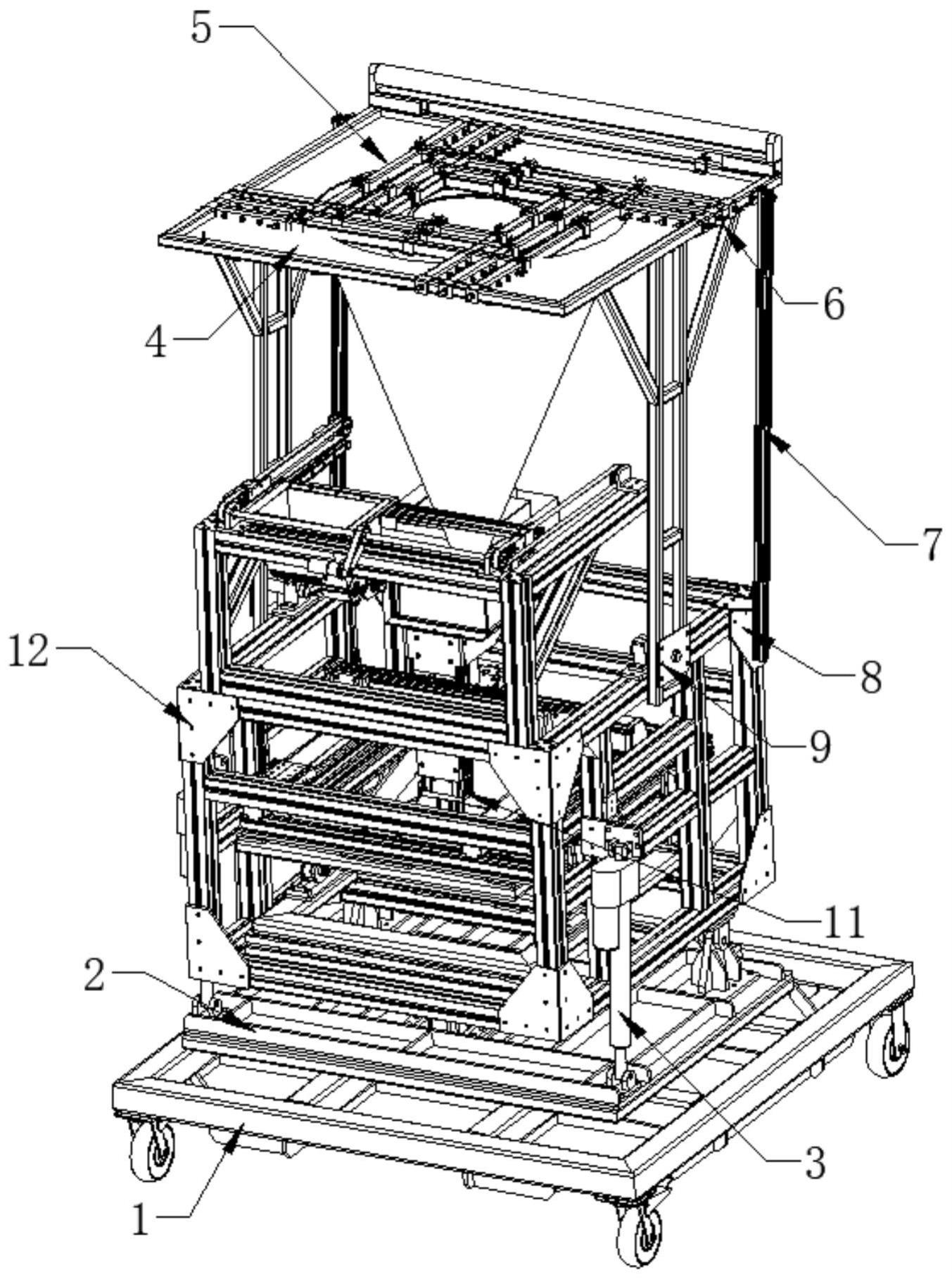
2、为实现上述目的,本发明提供如下技术方案:基于无机非金属材料成型的五轴机器人,包括移动平台机构,所述移动平台机构包括移动底座和两个第一移动轮,所述移动底座底部一侧的两端分别与两个第一移动轮的顶端固定连接,所述移动底座的上方设有方向台,所述方向台的上方设有五轴机架,所述五轴机架的上方设有追光台,所述五轴机架内壁的顶端安装有三轴运动模组,所述五轴机架内壁的底端固定安装有升降机构,所述升降机构包括升降底座和加工平台,所述升降底座顶端的中部转动连接有液压缸,所述液压缸的活动庀与加工平台底端的中部转动连接,所述方向台的一侧安装有俯仰机构,所述俯仰机构包括两个俯仰块和两个角度座,两个所述俯仰块的顶端分别与两个角度座的底端转动连接,所述五轴机架上固定安装有位于三轴运动模组一侧的给料压平机构,所述给料压平机构包括给料压平机架、刮平电机和落料电机,所述给料压平机架的内部与刮平电机的一侧固定连接,所述给料压平机架的中部与落料电机的一侧固定连接,所述追光台的顶端固定安装有追光机构,所述追光机构包括光圈架和四个透镜支撑杆,所述光圈架的四个侧面分别与四个透镜支撑杆的中部接触连接,且四个透镜支撑杆与光圈架的连接处均固定设置有垫块,三轴运动模组用于粉床熔覆生产作业的主要运动机构。
3、作为本发明的一种优选技术方案,所述移动底座底部另一侧的两端均固定安装有第二移动轮,两个所述第一移动轮的一侧均转动连接有刹车台,两个所述刹车台的一侧均固定安装有刹车片,所述移动底座的顶端转动连接有转盘,所述转盘的顶端与方向台底端的中部固定连接,所述方向台顶端的中部固定安装有驱动转盘转动的伺服电机,五轴机器人通过第一移动轮和第二移动轮进行转移和运输。
4、作为本发明的一种优选技术方案,所述升降底座顶端的两侧均安装有加固机构,两个所述加固机构均包括加固杆、活动块和安装座,所述安装座的内部与加固杆的一端转动连接,所述加固杆的另一端与活动块的一侧转动连接,两个所述活动块远离加固杆的一端分别与升降底座正对的一侧和加工平台正对的一侧滑动连接,两个所述安装座远离加固杆的一端分别与升降底座正对的一侧和加工平台正对的一侧固定连接,当压力油从无杆腔进入时,活塞有效面积最大的缸筒开始伸出,当行至终点时,活塞有效面积次之的缸筒开始伸出,液压缸伸缩的过程中带动加工平台沿着五轴机架滑动,实现机器人整体纵向移动机构。
5、作为本发明的一种优选技术方案,所述升降底座的底端与五轴机架固定连接,且所述加工平台与五轴机架滑动连接,升降机构通过升降底座安装在五轴机架上。
6、作为本发明的一种优选技术方案,两个所述俯仰块的底端均与方向台的顶端固定连接,两个所述角度座的顶端均与五轴机架的底端固定连接,所述方向台的两侧均固定安装有固定台,所述五轴机架的两侧均固定安装有连接台,两个所述固定台与两个连接台之间均转动连接有无杆气缸,无杆气缸上电磁阀打开,往无杆气缸内输入压缩空气,推动活塞在无杆气缸筒内做往复运动,无杆气缸进行伸缩运动,此时俯仰块想到与角度座发生角度偏转,实现机器人整体俯仰移动。
7、作为本发明的一种优选技术方案,所述五轴机架的表面滑动连接有两个滑行块,两个所述滑行块的顶端均固定安装有第一支架,两个所述第一支架的顶端分别与追光台底端的两侧固定连接,所述五轴机架上固定安装有两个位于滑行块一侧的定位板,两个所述定位板相背离的一侧均固定安装有第二支架,两个所述第二支架的顶端均与追光台正对的一侧转动连接。
8、作为本发明的一种优选技术方案,所述刮平电机的输出端固定安装有圆筒,所述落料电机的输出端固定安装有铺料带,所述给料压平机架的一侧与五轴机架固定连接,落料电机带动铺料带输送无机非金属材料,刮平电机带动圆筒压平无机非金属材料。
9、作为本发明的一种优选技术方案,四个所述透镜支撑杆的两端均固定安装有透镜本体,所述追光台顶端的四个边侧均固定安装有滑轨,八个所述透镜本体相背离的一侧均固定安装有与滑轨滑动连接的位移块,四个所述透镜支撑杆的表面均螺纹连接有螺母,八个所述位移块的表面均螺纹连接有螺栓,所述光圈架的底端固定连通有聚光斗,追光机构用于承载和控制聚光功能机构。
10、作为本发明的一种优选技术方案,所述五轴机架的内部固定安装有整机集成控制软件系统、五轴做动子系统控制软件、全自动给料压平子系统控制软件和全自动太阳光追光子系统控制软件,整机集成控制软件系统实现控制整机自动化生产,运动机构,均能手动单独控制,可自由设计生产节拍,五轴做动子系统控制软件采用g代码模式控制,可单独控制各轴移动,可控制各轴运动极限,全自动给料压平子系统控制软件可通过程序自动化控制给料,可通过程序控制给料速率,可通过程序控制给料压平节拍,全自动太阳光追光子系统控制软件全自动追光模式:同时自动追踪太阳方位角与高度角,半自动追光模式:自动追踪太阳方位角,高度角方向不自动追光,能放平,能手动调节倾角,(即底座自动水平旋转,能够手动调节倾斜并能放平);手动模式:可手动调节调节追光底座俯仰与转动。
11、与现有技术相比,本发明的有益效果是:
12、1、该五轴机器人实现四轴打印、自动追光、自动给料压平、模块化组装拆解,具备粉床熔覆和高温熔融挤出3-d打印能力,实现在全自动的情况下,将阳光和沙子等无机非金属材料转化成玻璃制品;
13、2、通过照度传感器自动识别光照强度,通过系统控制实现平台自动追光;
14、3、通过机械视觉系统智能识别粉体材料,自动调节上料速度及整平压力;
15、4、智能生产质量控制系统,根据材料参数、材料类型、光照条件的不同,智能控制平台运动节奏、平台俯仰角度、以及太阳光斑大小等,实现优化打印质量的效果。
技术特征:
1.基于无机非金属材料成型的五轴机器人,包括移动平台机构(1),其特征在于:所述移动平台机构(1)包括移动底座(101)和两个第一移动轮(102),所述移动底座(101)底部一侧的两端分别与两个第一移动轮(102)的顶端固定连接,所述移动底座(101)的上方设有方向台(2),所述方向台(2)的上方设有五轴机架(12),所述五轴机架(12)的上方设有追光台(4),所述五轴机架(12)内壁的顶端安装有三轴运动模组(11),所述五轴机架(12)内壁的底端固定安装有升降机构(15),所述升降机构(15)包括升降底座(151)和加工平台(154),所述升降底座(151)顶端的中部转动连接有液压缸(152),所述液压缸(152)的活动庀与加工平台(154)底端的中部转动连接,所述方向台(2)的一侧安装有俯仰机构(3),所述俯仰机构(3)包括两个俯仰块(35)和两个角度座(34),两个所述俯仰块(35)的顶端分别与两个角度座(34)的底端转动连接,所述五轴机架(12)上固定安装有位于三轴运动模组(11)一侧的给料压平机构(17),所述给料压平机构(17)包括给料压平机架(171)、刮平电机(173)和落料电机(174),所述给料压平机架(171)的内部与刮平电机(173)的一侧固定连接,所述给料压平机架(171)的中部与落料电机(174)的一侧固定连接,所述追光台(4)的顶端固定安装有追光机构(5),所述追光机构(5)包括光圈架(52)和四个透镜支撑杆(51),所述光圈架(52)的四个侧面分别与四个透镜支撑杆(51)的中部接触连接,且四个透镜支撑杆(51)与光圈架(52)的连接处均固定设置有垫块(53)。
2.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:所述移动底座(101)底部另一侧的两端均固定安装有第二移动轮(105),两个所述第一移动轮(102)的一侧均转动连接有刹车台(103),两个所述刹车台(103)的一侧均固定安装有刹车片(104),所述移动底座(101)的顶端转动连接有转盘(106),所述转盘(106)的顶端与方向台(2)底端的中部固定连接,所述方向台(2)顶端的中部固定安装有驱动转盘(106)转动的伺服电机(16)。
3.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:所述升降底座(151)顶端的两侧均安装有加固机构(153),两个所述加固机构(153)均包括加固杆(1531)、活动块(1532)和安装座(1533),所述安装座(1533)的内部与加固杆(1531)的一端转动连接,所述加固杆(1531)的另一端与活动块(1532)的一侧转动连接,两个所述活动块(1532)远离加固杆(1531)的一端分别与升降底座(151)正对的一侧和加工平台(154)正对的一侧滑动连接,两个所述安装座(1533)远离加固杆(1531)的一端分别与升降底座(151)正对的一侧和加工平台(154)正对的一侧固定连接。
4.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:所述升降底座(151)的底端与五轴机架(12)固定连接,且所述加工平台(154)与五轴机架(12)滑动连接。
5.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:两个所述俯仰块(35)的底端均与方向台(2)的顶端固定连接,两个所述角度座(34)的顶端均与五轴机架(12)的底端固定连接,所述方向台(2)的两侧均固定安装有固定台(31),所述五轴机架(12)的两侧均固定安装有连接台(33),两个所述固定台(31)与两个连接台(33)之间均转动连接有无杆气缸(32)。
6.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:所述五轴机架(12)的表面滑动连接有两个滑行块(9),两个所述滑行块(9)的顶端均固定安装有第一支架(6),两个所述第一支架(6)的顶端分别与追光台(4)底端的两侧固定连接,所述五轴机架(12)上固定安装有两个位于滑行块(9)一侧的定位板(8),两个所述定位板(8)相背离的一侧均固定安装有第二支架(7),两个所述第二支架(7)的顶端均与追光台(4)正对的一侧转动连接。
7.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:所述刮平电机(173)的输出端固定安装有圆筒(172),所述落料电机(174)的输出端固定安装有铺料带(175),所述给料压平机架(171)的一侧与五轴机架(12)固定连接。
8.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:四个所述透镜支撑杆(51)的两端均固定安装有透镜本体(54),所述追光台(4)顶端的四个边侧均固定安装有滑轨(13),八个所述透镜本体(54)相背离的一侧均固定安装有与滑轨(13)滑动连接的位移块(57),四个所述透镜支撑杆(51)的表面均螺纹连接有螺母(55),八个所述位移块(57)的表面均螺纹连接有螺栓(56),所述光圈架(52)的底端固定连通有聚光斗(14)。
9.根据权利要求1所述的基于无机非金属材料成型的五轴机器人,其特征在于:所述五轴机架(12)的内部固定安装有整机集成控制软件系统(10)、五轴做动子系统控制软件(18)、全自动给料压平子系统控制软件(19)和全自动太阳光追光子系统控制软件(20)。
技术总结
本发明公开了基于无机非金属材料成型的五轴机器人,包括移动平台机构,移动平台机构包括移动底座和两个第一移动轮,移动底座底部一侧的两端分别与两个第一移动轮的顶端固定连接,移动底座的上方设有方向台,方向台的上方设有五轴机架,五轴机架的上方设有追光台,五轴机架内壁的顶端安装有三轴运动模组,五轴机架内壁的底端固定安装有升降机构,升降机构包括升降底座和加工平台,升降底座顶端的中部转动连接有液压缸,本发明该五轴机器人实现四轴打印、自动追光、自动给料压平、模块化组装拆解,具备粉床熔覆和高温熔融挤出3‑D打印能力,实现在全自动的情况下,将阳光和沙子等无机非金属材料转化成玻璃制品。
技术研发人员:任磊,戴柏村
受保护的技术使用者:哈尔滨科语科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!