智能机器手热弯炉生产线的制作方法
本技术涉及玻璃生产设备,具体涉及一种玻璃热弯炉智能机械手的改进。
背景技术:
1、玻璃热弯炉是一种高温设备,玻璃热弯炉是将平板玻璃在高温熔融状态下弯曲成预定的形状,玻璃加工中需要将被加工玻璃放入热弯炉,然后再取出,由于玻璃属于易碎品,在很多场景中需要人工进行搬运和操作。
2、由于玻璃热弯炉一直处于高温状态,且被加工玻璃也是高温状态,普通人在高温下无法接近热弯炉炉体,只能等降下温度后靠近,这样以来就大大降低了生产效率,加之人工操作误差相对大、次品率也高。工作人员的工作环境非常恶劣,也不利于工人的身体健康。目前也有一些公司开发了一些机械手对玻璃进行转运操作,但是这类机械手常常会影响玻璃本身的质量,甚至导致玻璃的破碎变形。
技术实现思路
1、本实用新型的目的在于针对现有技术的缺陷和不足,提供一种智能机器手热弯炉生产线,它能通过智能机械手对热弯炉加工的玻璃进行转运操作,几乎完全脱离人工操作,大大提高了热弯炉对玻璃的加工效率,也能改善工作人员的工作环境,保证了工作人员的身心健康。
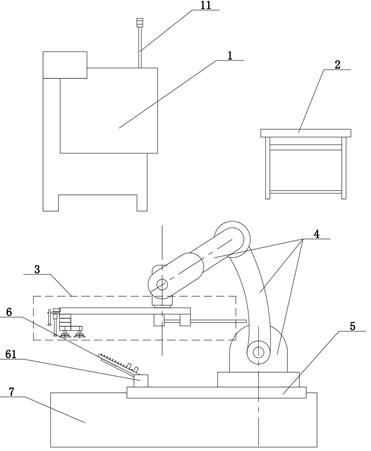
2、为实现上述目的,本实用新型采用以下技术方案是:它包含热弯炉1、玻璃成品储运工作台2,它还包含玻璃转运操作机构3、多自由度智能机械臂4、机械臂底座5、定位板6、底部滑轨7,热弯炉1和玻璃成品储运工作台2设置在底部滑轨7的两侧,机械臂底座5设置在底部滑轨7上,定位板6和多自由度智能机械臂4设置在机械臂底座5上,定位板6设置在多自由度智能机械臂4的一侧;多自由度智能机械臂4的控制端连接有玻璃转运操作机构3。
3、所述的玻璃转运操作机构3包含操作底板31、两根挑杆32、挑杆连接座33、数个吸盘34、推杆35、检测机构36;操作底板31固定连接在多自由度智能机械臂4的输出轴上,两根挑杆32通过挑杆连接座33固定在操作底板31的右侧,数个吸盘34均匀设置在操作底板31的左侧底面上;推杆35通过连接推动气缸351设置在操作底板31的左边外侧,推杆35为双排设置;检测机构36通过连接件361设置在两个推杆35之间。
4、所述数个吸盘34呈双排设置,且左右两排交错设置。吸盘34双排交错设置可以保证吸附玻璃时更加稳定,不易脱落。
5、所述定位板6通过连接座61固定在机械臂底座5上,定位板6倾斜设置,定位板6的倾斜方向面对玻璃转运操作机构3。
6、所述的定位板6上设置有多个垫板62,垫板62均匀设置在定位板6的上表面上,垫板62的顶部设置有软性垫621;定位板6的底部靠近侧边处设置有数个底部定位柱63,数个底部定位柱63呈直线设置;定位板6的一侧边上设置有侧边定位柱64。
7、所述热弯炉1的一侧设置有警示灯11。警示灯11可以在当前热弯完成后发出声光信号,提醒用户。
8、所述的吸盘34分为两组,一组为单层吸盘341,另一组为多层吸盘342,单层吸盘341和多层吸盘342交错配合使用。单层吸盘341具有较强的吸附定位作用,即吸附后在侧方向也不会产生位移,但是自身吸附力不够强;多层吸盘342为两层或者三层吸盘,多层吸盘342在侧向位移的稳定性较差,但是在径向的吸附能力上具有较强的稳定性。
9、本实用新型的工作原理:热弯当炉内的被加工玻璃片在高温的加热下完成热弯以后,炉盖上面的警示灯11会发出警示,此时多自由度智能机械臂4和机械臂底座5自动发出一个信号,机械臂底座5沿着轨道行进至对应的热弯炉1前;首先转动多自由度智能机械臂4,用检测机构36扫描识别一下玻璃成品储运工作台2上面是否有产品放置空位,如果没有空位多自由度智能机械臂4停止工作并发出警报,如果有空位此时给热弯炉炉盖一个信号,在拉杆的作用下炉盖自动开启,此时玻璃转运操作机构3上面的挑杆32插放模具侧面的方孔内将模具以及模具热弯好的玻璃片挑起放置在玻璃成品储运工作台2上。然后玻璃成品储运工作台2向下移动一点抽出模具,再将模具放回炉内,此时玻璃成品储运工作台2用吸盘34再吸住一块全新的被加工玻璃片将其放置在定位板6上,由于定位板6是倾斜状态,所以放置在上面的被加工玻璃片都会滑至底部,通过底部定位柱63和侧边定位柱64自动托住被加工玻璃;此时玻璃转运操作机构3利用吸盘34二次吸起就会有了精准的定位,此步骤是为了玻璃转运操作机构3能精准对称地将被加工玻璃片放在热弯炉内的模具上面,以防折后的玻璃不符合生产要求,放置玻璃片完成后炉盖在拉手的作用下合上开始热弯加工。
10、采用上述技术方案后,本实用新型有益效果为:它能通过智能机械手对热弯炉加工的玻璃进行转运操作,几乎完全脱离人工操作,大大提高了热弯炉对玻璃的加工效率,也能改善工作人员的工作环境,保证了工作人员的身心健康。
技术特征:
1.智能机器手热弯炉生产线,它包含热弯炉(1)、玻璃成品储运工作台(2),其特征在于:它还包含玻璃转运操作机构(3)、多自由度智能机械臂(4)、机械臂底座(5)、定位板(6)、底部滑轨(7),热弯炉(1)和玻璃成品储运工作台(2)设置在底部滑轨(7)的两侧,机械臂底座(5)设置在底部滑轨(7)上,定位板(6)和多自由度智能机械臂(4)设置在机械臂底座(5)上,定位板(6)设置在多自由度智能机械臂(4)的一侧;多自由度智能机械臂(4)的控制端连接有玻璃转运操作机构(3);
2.根据权利要求1所述的智能机器手热弯炉生产线,其特征在于:所述数个吸盘(34)呈双排设置,且左右两排交错设置。
3.根据权利要求1所述的智能机器手热弯炉生产线,其特征在于:所述定位板(6)通过连接座(61)固定在机械臂底座(5)上,定位板(6)倾斜设置,定位板(6)的倾斜方向面对玻璃转运操作机构(3)。
4.根据权利要求1所述的智能机器手热弯炉生产线,其特征在于:所述的定位板(6)上设置有多个垫板(62),垫板(62)均匀设置在定位板(6)的上表面上,垫板(62)的顶部设置有软性垫(621);定位板(6)的底部靠近侧边处设置有数个底部定位柱(63),数个底部定位柱(63)呈直线设置;定位板(6)的一侧边上设置有侧边定位柱(64)。
5.根据权利要求1所述的智能机器手热弯炉生产线,其特征在于:所述热弯炉(1)的一侧设置有警示灯(11)。
6.根据权利要求2所述的智能机器手热弯炉生产线,其特征在于:所述的吸盘(34)分为两组,一组为单层吸盘(341),另一组为多层吸盘(342),单层吸盘(341)和多层吸盘(342)交错配合使用。
技术总结
智能机器手热弯炉生产线,它涉及玻璃生产设备,具体涉及一种玻璃热弯炉智能机械手的改进。热弯炉和玻璃成品储运工作台设置在底部滑轨7的两侧,机械臂底座设置在底部滑轨上,定位板和多自由度智能机械臂设置在机械臂底座上,定位板设置在多自由度智能机械臂的一侧;多自由度智能机械臂的控制端连接有玻璃转运操作机构。操作底板固定连接在多自由度智能机械臂的输出轴上,两根挑杆通过挑杆连接座固定在操作底板的右侧,数个吸盘均匀设置在操作底板的左侧底面上;推杆通过连接推动气缸设置在操作底板的左边外侧,推杆为双排设置;检测机构通过连接件设置在两个推杆之间。它能通过智能机械手对热弯炉加工的玻璃进行转运操作,几乎完全脱离人工操作,大大提高了热弯炉对玻璃的加工效率,也能改善工作人员的工作环境,保证了工作人员的身心健康。
技术研发人员:张显伟
受保护的技术使用者:张显伟
技术研发日:20230314
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!