生物体操作方法及生物体操作装置与流程
本发明涉及生物体操作方法及生物体操作装置。
背景技术:
1、在细胞生物学的研究等中,进行从培养容器内的多量细胞中吸引特定细胞的操作。在专利文献1中,公开了一种进行以大量细胞中的有特征性的细胞为对象的吸引作业的支援的系统。
2、专利文献1:日本特开2019-030263号公报
技术实现思路
1、在本发明的第1方案中,提供一种生物体的操作方法。生物体的操作方法可以具备在浸有生物体的液体中形成气泡的气泡形成阶段。生物体的操作方法可以具备使上述生物体附着于上述气泡的生物体附着阶段。生物体的操作方法可以具备在上述气泡中产生气流并利用上述气流对上述生物体的位置进行操作的气流控制阶段。
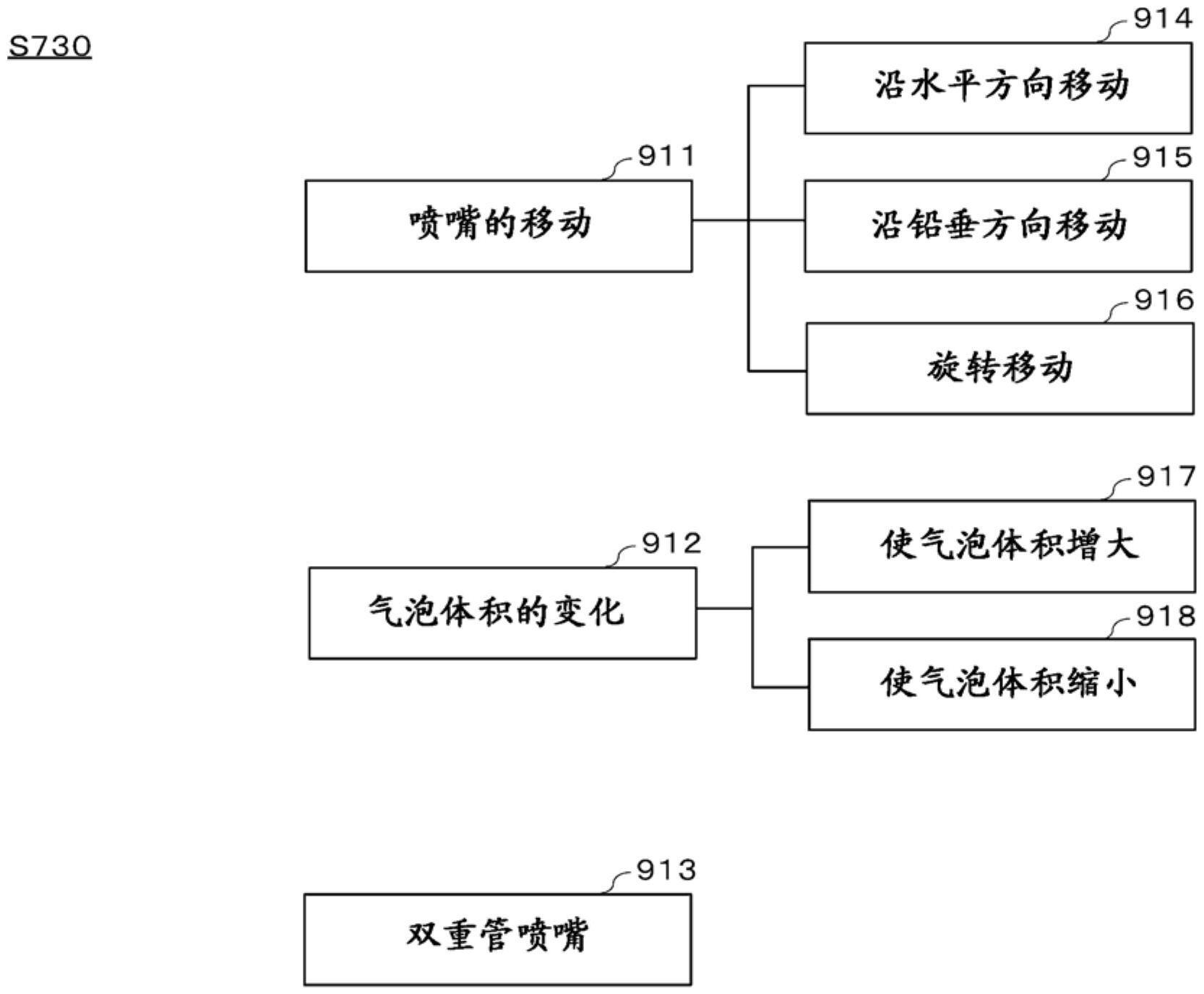
2、在本发明的第2方案中,上述气泡形成阶段可以通过将流路的端部浸于液体中并从上述端部向上述液体导入气体来进行,上述气流控制阶段可以包括通过移动上述流路与上述液体的相对位置而在上述气泡中产生气流。
3、在本发明的第3方案中,也可以是,上述气泡形成阶段包括在上述流路的端部形成气泡并维持。
4、在本发明的第4方案中,也可以是,上述气流控制阶段包括通过使上述流路与保存上述液体的容器中的上述生物体所接触的面之间的相对位置向相对于水平方向的±20°的范围的方向移动而在上述气泡中产生气流。
5、在本发明的第5方案中,也可以是,上述气流控制阶段包括通过使上述流路与保存上述液体的容器中的上述生物体所接触的面之间的相对位置向相对于铅垂方向的±20°的范围的方向移动而在上述气泡中产生气流。
6、在本发明的第6方案中,上述液体及上述生物体可以收纳于容器,上述气流控制阶段可以包括在上述气泡与上述容器中的上述生物体所接触的面接触的状态下使上述流路与上述液体的相对位置移动。
7、在本发明的第7方案中,也可以是,上述气流控制阶段包括通过改变上述气泡的体积而在上述气泡中产生气流。
8、在本发明的第8方案中,也可以是,上述气流控制阶段包括通过使上述气泡的体积增大而在上述气泡中产生气流。
9、在本发明的第9方案中,也可以是,上述气流控制阶段包括通过使上述气泡的体积缩小而在上述气泡中产生气流。
10、在本发明的第10方案中,上述气泡形成阶段可以通过将流路的端部浸于液体中并从上述端部向上述液体导入气体来进行,上述流路可以包含供给上述气体的气体供给流路和回收上述气体的气体回收流路。上述气流控制阶段可以包括使从上述气体供给流路的端部供给的上述气体从上述气泡通过而产生朝向上述气体回收流路的端部流动的气流。
11、在本发明的第11方案中,上述流路可以具有双重管构造,上述气体供给流路可以是上述双重管构造中的内侧和外侧中的一方的流路,上述气体回收流路可以是上述双重管构造中的内侧和外侧中的另一方的流路。
12、在本发明的第12方案中,也可以是,在上述气流控制阶段之后,还具备从上述液体回收上述生物体的回收阶段。
13、在本发明的第13方案中,提供一种用于操作生物体的生物体操作装置。生物体操作装置可以具备端部浸于供上述生物体浸入的液体且能够向上述液体导入气体的流路。生物体操作装置可以具备气泡控制部,其在从上述端部向上述液体导入上述气体而形成的气泡中产生气流,利用上述气流对上述生物体的位置进行操作。
14、在本发明的第14方案中,也可以是,上述气泡控制部以维持在上述端部所形成的气泡的方式进行控制。
15、在本发明的第15方案中,也可以是,上述气泡控制部具有流路位置控制部,其控制使上述流路移动的致动器,由此控制上述气泡中的气流。
16、在本发明的第16方案中,也可以是,上述气泡控制部具有载物台位置控制部,其控制使搭载对上述生物体进行收纳的容器的载物台移动的致动器,由此控制上述气泡中的气流。
17、在本发明的第17方案中,也可以是,上述气泡控制部具有体积控制部,其控制与上述流路连接的泵,由此控制上述液体中的上述气泡的体积。
18、另外,在本发明的第18方案中,提供一种生物体操作装置。生物体操作装置可以具备将端部配置在保存于容器的包含生物体的液体中的流路。生物体操作装置可以具备向上述流路导入气体而形成气泡的泵。生物体操作装置可以具备能够改变上述容器或上述流路的位置的位置控制部。上述泵或位置控制部可以使上述生物体附着于上述气泡的气液界面。上述位置控制部可以在铅垂方向观察下,以上述流路的中心轴为基准使上述流路向上述生物体的相反方向移动。
19、需要说明的是,上述的发明概要并没有列举本发明所需的全部特征。另外,这些特征组的子组合也能够另外成为技术方案。
技术特征:
1.一种生物体的操作方法,具备:
2.如权利要求1所述的操作方法,其中,
3.如权利要求2所述的操作方法,其中,
4.如权利要求2或3所述的操作方法,其中,
5.如权利要求2至4中任一项所述的操作方法,其中,
6.如权利要求2至5中任一项所述的操作方法,其中,
7.如权利要求1至6中任一项所述的操作方法,其中,
8.如权利要求7所述的操作方法,其中,
9.如权利要求7所述的操作方法,其中,
10.如权利要求1至9中任一项所述的操作方法,其中,
11.如权利要求10所述的操作方法,其中,
12.如权利要求1至11中任一项所述的操作方法,其中,
13.一种生物体操作装置,用于操作生物体,具备:
14.如权利要求13所述的生物体操作装置,其中,
15.如权利要求13或14所述的生物体操作装置,其中,
16.如权利要求13至15中任一项所述的生物体操作装置,其中,
17.如权利要求13至16中任一项所述的生物体操作装置,其中,
18.一种生物体操作装置,具备:
技术总结
在本发明的第1方案中,提供一种生物体的操作方法,具备:在浸有生物体的液体中形成气泡的气泡形成阶段;使上述生物体附着于上述气泡的生物体附着阶段;和在上述气泡中产生气流并利用上述气流对上述生物体的位置进行操作的气流控制阶段。
技术研发人员:森山真树,石泽直也,小林辽,中村太一,田中修平,林世莉,田洼牧子
受保护的技术使用者:株式会社尼康
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!