生物反应器的阶梯转速控制方法和装置与流程
本发明涉及设备控制,尤其是涉及生物反应器的阶梯转速控制方法和装置。
背景技术:
1、生物反应器适用于生物制药领域内各种生物培养工艺开发和测试,培养基优化可用于生物药品和疫苗的生产,在对哺乳动物、昆虫等细胞株的悬浮式培养、对酵母、细菌以及某些霉菌的培养和对微载体贴壁型的细胞系培养等领域有广泛的应用。
2、生物反应器主要分为搅拌式生物反应器和激流式生物反应器。相比于传统的搅拌式生物反应器,激流式生物反应器可获得较高的细胞密度及活率。
3、激流式生物反应器采用“非鼓泡式交界面传氧机制”进行传氧,传氧效率高,避免了传统搅拌式生物反应器鼓泡表面张力和搅拌桨高剪切力对细胞的损伤,易于实现高密度高活性细胞培养。应用于细胞的悬浮培养(如hek293和cho等),适用于不同培养工艺(如批次培养、批流加和灌流等)。
4、“非鼓泡式交界面传氧机制”主要是通过振荡器转速控制产生激流使培养液反复冲刷培养袋内表面,使氧分子迅速溶解,转速越快溶解氧效率越高。
5、转速控制的稳定性在整个细胞培养中起到决定性作用,特别在300l以上大体积的激流式反应器生物培养过程中会遇到高转速时,会遇到以下问题:
6、(1)培养袋绑带损坏。在培养罐和袋体有4根带子进行绑定,在从停止提升至30rpm以上的转速过程中,由于转速提升过快,带动袋内液体产生很大惯性,会拉扯培养袋的4根绑带,长期运行疲劳会损坏绑带。
7、(2)培养袋偏移。由于培养袋和罐体之间只有4根绑带进行固定,在高转速提升过程中转速过快,导致袋体偏移,影响电极等传感器,可能会发生传感器损坏等现象,并且袋子出现褶皱,影响生物细胞培养的效率。
8、(3)转速过冲。在高转速的提升过程中,因为培养袋内液体产生的惯性,导致转速会出现不稳定过冲的现象。
技术实现思路
1、有鉴于此,本发明的目的在于提供生物反应器的阶梯转速控制方法和装置,避免了转速爬升过快引起的细胞死亡以及培养袋的偏移,并且可以防止高转速时发生的转速过冲现象。
2、第一方面,本发明实施例提供了生物反应器的阶梯转速控制方法,所述方法包括:
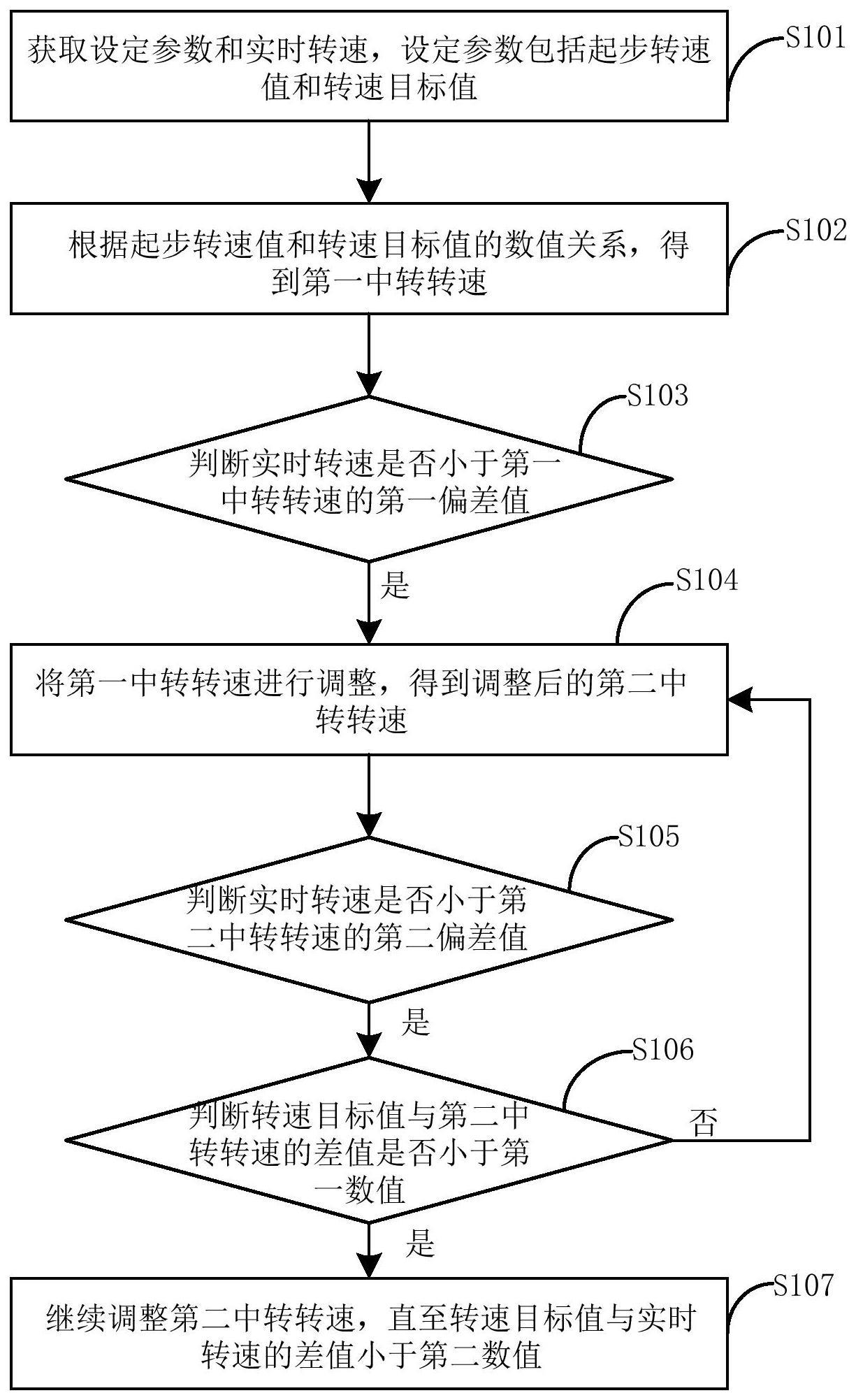
3、获取设定参数和实时转速,所述设定参数包括起步转速值和转速目标值;
4、根据所述起步转速值和所述转速目标值的数值关系,得到第一中转转速;
5、判断所述实时转速是否小于所述第一中转转速的第一偏差值;
6、如果是,则将所述第一中转转速进行调整,得到调整后的第二中转转速;
7、判断所述实时转速是否小于所述第二中转转速的第二偏差值;
8、如果是,则判断所述转速目标值与所述第二中转转速的差值是否小于第一数值;
9、如果是,则继续调整所述第二中转转速,直至所述转速目标值与所述实时转速的差值小于第二数值。
10、进一步的,根据所述起步转速值和所述转速目标值的数值关系,得到第一中转转速,包括:
11、判断所述转速目标值是否大于所述起步转速值;
12、如果是,则将所述起步转速值作为所述第一中转转速的初始值。
13、进一步的,判断所述转速目标值是否大于所述起步转速值,包括:
14、如果否,则按照变频器的爬升速度进行转速提升,直至达到所述转速目标值。
15、进一步的,所述设定参数还包括转速偏差值,所述实时转速为激流式生物反应器中振荡器的转速;所述第一中转转速的第一偏差值为所述第一中转转速的初始值与所述转速偏差值之间的差值;所述第二中转转速的第二偏差值为所述第二中转转速与所述转速偏差值之间的差值。
16、进一步的,判断所述转速目标值与所述第二中转转速的差值是否小于第一数值,包括:
17、如果否,则将所述第二中转转速继续进行调整,直至所述转速目标值与所述第二中转转速的差值小于所述第一数值。
18、第二方面,本发明实施例提供了生物反应器的阶梯转速控制装置,所述装置包括:
19、参数获取模块,用于获取设定参数和实时转速,所述设定参数包括起步转速值和转速目标值;
20、第一中转转速获取模块,用于根据所述起步转速值和所述转速目标值的数值关系,得到第一中转转速;
21、第一判断模块,用于判断所述实时转速是否小于所述第一中转转速的第一偏差值;
22、第一调整模块,用于在所述实时转速小于所述第一中转转速的第一偏差值的情况下,将所述第一中转转速进行调整,得到调整后的第二中转转速;
23、第二判断模块,用于判断所述实时转速是否小于所述第二中转转速的第二偏差值;
24、第三判断模块,用于在所述实时转速小于所述第二中转转速的第二偏差值的情况下,判断所述转速目标值与所述第二中转转速的差值是否小于第一数值;
25、第二调整模块,用于在所述转速目标值与所述第二中转转速的差值小于所述第一数值的情况下,继续调整所述第二中转转速,直至所述转速目标值与所述实时转速的差值小于第二数值。
26、进一步的,所述第一中转转速获取模块具体用于:
27、判断所述转速目标值是否大于所述起步转速值;
28、如果是,则将所述起步转速值作为所述第一中转转速的初始值。
29、进一步的,所述第一中转转速获取模块具体用于:
30、如果否,则按照变频器的爬升速度进行转速提升,直至达到所述转速目标值。
31、第三方面,本发明实施例提供了电子设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的方法。
32、第四方面,本发明实施例提供了具有处理器可执行的非易失的程序代码的计算机可读介质,所述程序代码使所述处理器执行如上所述的方法。
33、本发明实施例提供了生物反应器的阶梯转速控制方法和装置,包括:获取设定参数和实时转速,设定参数包括起步转速值和转速目标值;根据起步转速值和转速目标值的数值关系,得到第一中转转速;判断实时转速是否小于第一中转转速的第一偏差值;如果是,则将第一中转转速进行调整,得到调整后的第二中转转速;判断实时转速是否小于第二中转转速的第二偏差值;如果是,则判断转速目标值与第二中转转速的差值是否小于第一数值;如果是,则继续调整第二中转转速,直至转速目标值与实时转速的差值小于第二数值;避免了转速爬升过快引起的细胞死亡以及培养袋的偏移,并且可以防止高转速时发生的转速过冲现象。
34、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
35、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种生物反应器的阶梯转速控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的生物反应器的阶梯转速控制方法,其特征在于,根据所述起步转速值和所述转速目标值的数值关系,得到第一中转转速,包括:
3.根据权利要求2所述的生物反应器的阶梯转速控制方法,其特征在于,判断所述转速目标值是否大于所述起步转速值,包括:
4.根据权利要求1所述的生物反应器的阶梯转速控制方法,其特征在于,所述设定参数还包括转速偏差值,所述实时转速为激流式生物反应器中振荡器的转速;所述第一中转转速的第一偏差值为所述第一中转转速的初始值与所述转速偏差值之间的差值;所述第二中转转速的第二偏差值为所述第二中转转速与所述转速偏差值之间的差值。
5.根据权利要求1所述的生物反应器的阶梯转速控制方法,其特征在于,判断所述转速目标值与所述第二中转转速的差值是否小于第一数值,包括:
6.一种生物反应器的阶梯转速控制装置,其特征在于,所述装置包括:
7.根据权利要求6所述的生物反应器的阶梯转速控制装置,其特征在于,所述第一中转转速获取模块具体用于:
8.根据权利要求7所述的生物反应器的阶梯转速控制装置,其特征在于,所述第一中转转速获取模块具体用于:
9.一种电子设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1至5任一项所述的方法。
10.一种具有处理器可执行的非易失的程序代码的计算机可读介质,其特征在于,所述程序代码使所述处理器执行所述权利要求1至5任一项所述的方法。
技术总结
本发明提供了生物反应器的阶梯转速控制方法和装置,包括:获取设定参数和实时转速,设定参数包括起步转速值和转速目标值;根据起步转速值和转速目标值的数值关系,得到第一中转转速;判断实时转速是否小于第一中转转速的第一偏差值;如果是,则将第一中转转速进行调整,得到调整后的第二中转转速;判断实时转速是否小于第二中转转速的第二偏差值;如果是,则判断转速目标值与第二中转转速的差值是否小于第一数值;如果是,则继续调整第二中转转速,直至转速目标值与实时转速的差值小于第二数值;避免了转速爬升过快引起的细胞死亡以及培养袋的偏移,并且可以防止高转速时发生的转速过冲现象。
技术研发人员:张哲昕,项英杰,朱雅男,徐江运,徐龙渤,徐茏林
受保护的技术使用者:浙江金仪盛世生物工程有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!