液态金属@MXene复合水凝胶光响应自感知驱动器及其制备方法
本发明涉智能软体机器人的,具体涉及一种液态金属@mxene复合水凝胶光响应自感知驱动器及其制备方法。
背景技术:
1、生物体可以感知外界刺激并自动做出反应,这是由于它们有丰富的体感和神经肌肉系统。人类的手指、章鱼的手臂、大象的鼻子等柔软的肢体可以通过连续的动作完成复杂的任务。科学家们从仿生角度出发,研究人造机器人,希望通过将传感器、外部摄像头和执行器与计算控制系统耦合来完成感觉运动任务。然而这些复杂的多电子集成限制了体积小型化和更高水平的运动性,对具有自我感知能力的智能软执行器仍然是一个挑战。
2、为了模拟生物的大变形、快速环境反应和多功能运动在执行器中实现自感知功能,研究者们通过物理层压或嵌入手段设计各种传感装置,然而,由于传感器和执行器之间的模量不匹配,会导致界面上的器件损坏。传感和驱动模块也是预定义的,在处理复杂和不断变化的环境时限制了它的应用。科学家们开发了由新的刺激响应聚合物制成的驱动器,如液晶弹性体、电活性聚合物、形状记忆聚合物和刺激响应水凝胶。这些材料具有固有的刺激响应性,因此能够实现高度灵活和复杂的局部变形。在这些软响应性聚合物中,水凝胶具有实现多功能性的潜力,因为它们能够在各种环境刺激下经历显著的体积变化,如温度、光照、ph、电场和化学物质等,可以用在给药的微型机器人、操纵物体的宏观致动器等多个领域,但目前水凝胶驱动器和传感器集成存在模量不匹配及界面问题,因此,开发一种具有高延展性、高导电性、快速响应和变形感知能力(本体感受和外部感受)的驱动传感一体化的水凝胶复合体系自感知驱动器是非常必要的。
技术实现思路
1、本发明的目的是针对现有技术中存在的技术缺陷,而提供一种液态金属@mxene复合水凝胶光响应自感知驱动器及其制备方法。
2、为实现本发明的目的所采用的技术方案是:
3、一种液态金属@mxene复合水凝胶光响应自感知驱动器的制备方法,包括以下步骤:
4、步骤1,将mxene纳米片超声分散于去离子水中,加入硅烷偶联剂,常温搅拌,向溶液中加入液态金属,置于粉碎机中粉碎,即得到液态金属@mxene纳米液滴溶液;
5、步骤2:向上述液态金属@mxene纳米液滴溶液中加入丙烯酰胺水凝胶单体和光引发剂,得到前驱液,将包含上述前驱液的模具置于水平面上静置,紫外光照射引发自由基聚合即得液态金属@mxene复合水凝胶光响应自感知驱动器。
6、在上述技术方案中,所述步骤1中,所述mxene纳米片、硅烷偶联剂、液态金属的质量比为(1-5):(1-5):(4-5);所述搅拌时间为12-24h;所述粉碎时间为90-120min。
7、在上述技术方案中,所述步骤1中,所述硅烷偶联剂选自3-氨丙基三乙氧基硅烷、γ-甲基丙烯酰氧基丙基三甲氧基硅烷或3-巯丙基三乙氧基硅烷中的一种或多种。
8、在上述技术方案中,所述步骤1中,所述液态金属选自镓铟合金、镓铟镍合金或镓铟锌合金中的一种或多种。
9、在上述技术方案中,所述步骤2中,所述水凝胶单体选自n-异丙基丙烯酰胺和n,n′-亚甲基双丙烯酰胺中的一种或两种;
10、当所述水凝胶单体包括n-异丙基丙烯酰胺和n,n′-亚甲基双丙烯酰胺两种时,n-异丙基丙烯酰胺和n,n′-亚甲基双丙烯酰胺的质量比为(1000-2000):(5-50);
11、所述步骤2中的水凝胶单体与步骤1中的mxene纳米片的质量比为1:(10-20)。
12、在上述技术方案中,所述步骤2中,所述光引发剂为2-羟基-2-甲基苯丙酮。
13、在上述技术方案中,所述步骤2中,所述静置的时间为10-30min;所述紫外光照射的时间为10-20min。
14、本发明的另一方面,还包括通过所述制备方法得到的液态金属@mxene复合水凝胶光响应自感知驱动器。
15、在上述技术方案中,所述步骤2中,在模具的右半侧放置掩膜,紫外光照射使得模具内左侧前驱液聚合为水凝胶,聚合完成后将模具翻转在水平桌面上静置,撤去掩膜置于紫外光下照射使得模具内右侧前驱液聚合为水凝胶,即得“s”形可编程液态金属@mxene复合水凝胶自感知驱动器。
16、在上述技术方案中,所述步骤2中,将前驱液置于模具中在水平桌面上静置,在模具上划出三均分的区域,在1/3左半侧和1/3右半侧均放置掩膜,紫外光照射使得模具内1/3中间区域内前驱液聚合为水凝胶,聚合完成后将模具内未聚合的前驱液剧烈振荡以使得前驱液内液态金属@mxene纳米液滴均匀分散,然后将模具放置于紫外光下以引发自由基聚合,即得“u”形可编程液态金属@mxene复合水凝胶自感知驱动器。
17、与现有技术相比,本发明的有益效果是:
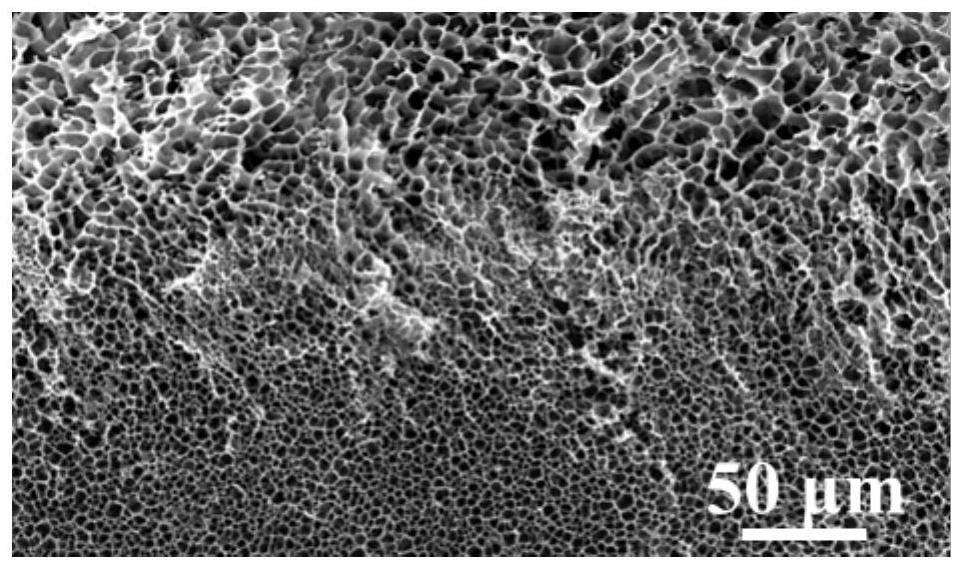
18、1.将液态金属@mxene纳米液滴原位聚合在水凝胶体系中并通过重力自沉降作用实现纳米液滴在水凝胶体系中平行于重力方向呈梯度分布,从而将驱动和传感功能化学集成在水凝胶复合体系中制备驱动传感一体化的液态金属@mxene复合水凝胶自感知驱动器,通过监测液态金属@mxene复合水凝胶驱动器两端的电阻变化即可实时感知其驱动状态以实现驱动传感一体化。
19、2.本发明中采用表面功能化的mxene纳米片封装包覆液态金属液滴形成一种类核壳结构,可改善液态金属在水凝胶体系中的相容性和导电性,实现液态金属@mxene纳米液滴对水凝胶的增韧效果。
20、3.本发明中液态金属重力自沉降可通过结合掩膜板光引发聚合和局部改变液态金属重力沉降方向实现液态金属@mxene水凝胶的分步聚合、图案化聚合或按需定制聚合,实现水凝胶的形状可编程驱动。
技术特征:
1.一种液态金属@mxene复合水凝胶光响应自感知驱动器的制备方法,其特征在于,包括以下步骤:
2.如权利要求1所述的制备方法,其特征在于,所述步骤1中,所述mxene纳米片、硅烷偶联剂、液态金属的质量比为(1-5):(1-5):(4-5);所述搅拌时间为12-24h;所述粉碎时间为90-120min。
3.如权利要求1所述的制备方法,其特征在于,所述步骤1中,所述硅烷偶联剂选自3-氨丙基三乙氧基硅烷、γ-甲基丙烯酰氧基丙基三甲氧基硅烷或3-巯丙基三乙氧基硅烷中的一种或多种。
4.如权利要求1所述的制备方法,其特征在于,所述步骤1中,所述液态金属选自镓铟合金、镓铟镍合金或镓铟锌合金中的一种或多种。
5.如权利要求1所述的制备方法,其特征在于,所述步骤2中,所述水凝胶单体选自n-异丙基丙烯酰胺和n,n′-亚甲基双丙烯酰胺中的一种或两种;
6.如权利要求1所述的制备方法,其特征在于,所述步骤2中,所述光引发剂为2-羟基-2-甲基苯丙酮。
7.如权利要求1所述的制备方法,其特征在于,所述步骤2中,所述静置的时间为10-30min;所述紫外光照射的时间为10-20min。
8.如权利要求1-7中任一项通过所述制备方法得到的液态金属@mxene复合水凝胶光响应自感知驱动器。
9.如权利要求8中所述的液态金属@mxene复合水凝胶光响应自感知驱动器,其特征在于,所述步骤2中,在模具的右半侧放置掩膜,紫外光照射使得模具内左侧前驱液聚合为水凝胶,聚合完成后将模具翻转在水平桌面上静置,撤去掩膜置于紫外光下照射使得模具内右侧前驱液聚合为水凝胶,即得“s”形可编程液态金属@mxene复合水凝胶自感知驱动器。
10.如权利要求8中所述的液态金属@mxene复合水凝胶光响应自感知驱动器其特征在于,所述步骤2中,将前驱液置于模具中在水平桌面上静置,在模具上划出三均分的区域,在1/3左半侧和1/3右半侧均放置掩膜,紫外光照射使得模具内1/3中间区域内前驱液聚合为水凝胶,聚合完成后将模具内未聚合的前驱液剧烈振荡以使得前驱液内液态金属@mxene纳米液滴均匀分散,然后将模具放置于紫外光下以引发自由基聚合,即得“u”形可编程液态金属@mxene复合水凝胶自感知驱动器。
技术总结
本发明公开了一种液态金属@MXene复合水凝胶光响应自感知驱动器及其制备方法,采用表面功能化的MXene纳米片封装包覆液态金属液滴形成一种类核壳结构,改善液态金属在水凝胶体系中的相容性和导电性,实现液态金属@MXene纳米液滴对水凝胶的增韧效果,同时,液态金属@MXene纳米液滴在水凝胶体系内呈梯度分布从而实现光响应驱动,通过监测液态金属@MXene复合水凝胶驱动器两端的电阻变化可实时感知其驱动状态以实现驱动传感一体化。
技术研发人员:许鑫华,马绍帅,王玲,雪盼
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!