一种带压力反馈的细菌采样吸嘴的制作方法
本发明属于细菌采样,特别是涉及一种带压力反馈的细菌采样吸嘴。
背景技术:
1、在细菌采样过程中,通常需要通过安装在机械臂末端的吸嘴来吸取培养皿中的菌落。现有的采样过程是对机械臂设置固定形成行程,带着吸嘴按照固定行程降至培养皿中吸取菌落,这种方法有助于标准化采样量,但是固定行程的方法也存在一些局限性:
2、忽略局部差异:这种方法可能忽略样本中不同区域或位置的潜在差异,某些区域可能含有更多或更少的细菌,而固定行程的采样方法不能灵活地适应这些差异。
3、采样深度限制:固定行程可能限制了采样的深度或范围,导致无法获取样本内部深处的细菌信息;在某些情况下,细菌可能分布在样本的不同层面或深度,而这种方法可能无法充分获取全面的信息。
4、采样误差:如果操作者设定的参数与实际情况不匹配,可能会导致采样误差。比如,设定的深度与样本表面的真实细菌分布有差异,可能导致采样不足或超出预期。
5、样本破坏:在特定情况下,固定行程的采样方法可能会对样本造成破坏。例如,如果样本表面较脆弱或易受损,固定深度的采样可能会对其造成损害,影响采样的准确性和完整性。
6、数据局限性:由于忽略了样本内部的差异性,可能导致数据的局限性,从而影响对细菌分布或特性的全面理解。
7、因此,提供一种带压力反馈的细菌采样吸嘴,解决上述的问题
技术实现思路
1、本发明的目的在于提供一种带压力反馈的细菌采样吸嘴,解决背景技术中提出的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
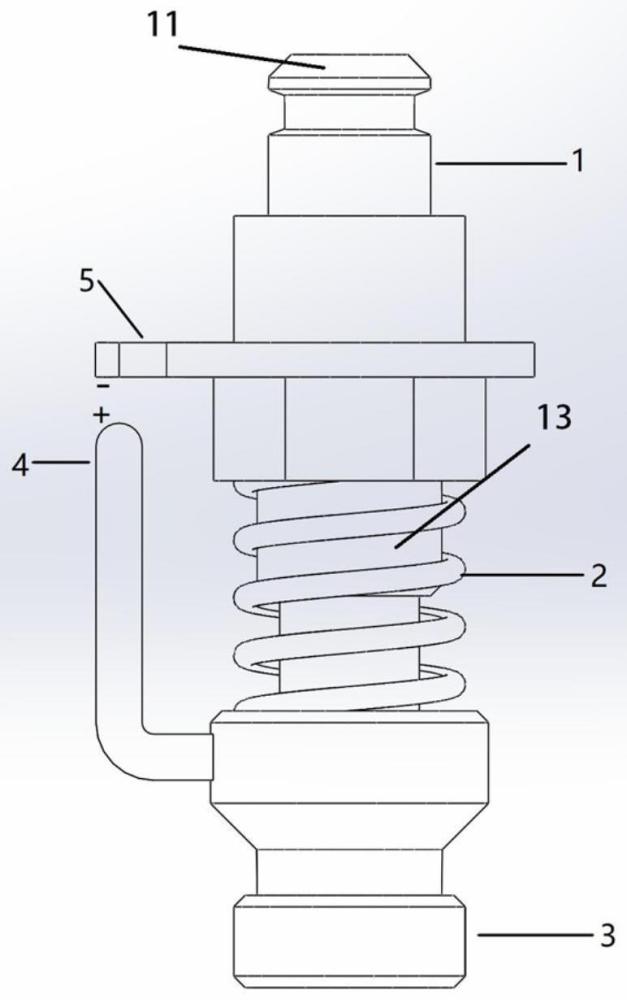
3、本发明为一种带压力反馈的细菌采样吸嘴,包括吸嘴底座和吸嘴头,所述吸嘴底座上表面设置有卡块,所述吸嘴底座周侧面设置有接触板,所述接触板为电极片负极,所述吸嘴底座下表面设置有伸缩杆,所述伸缩杆下端与吸嘴头固定连接,所述伸缩杆周侧面设置有弹簧,所述弹簧上端与吸嘴底座固定连接,所述弹簧下端与吸嘴头固定连接,所述吸嘴头周侧面设置有接触柱,所述接触柱为电极片正极。
4、进一步地,所述吸嘴底座与外接机械臂连接,所述卡块与外接机械臂的卡口之间卡装配合。
5、进一步地,所述接触柱为“l”形柱体结构,所述接触柱的位置和大小均与接触板相适应,所述接触柱与接触板之间相互配合。
6、本发明具有以下有益效果:
7、1、实时监测采样压力:本发明能够实时监测在吸取菌落过程中施加在吸嘴头上的压力变化,便于确保适当的采样力度,避免对样本造成损害。
8、2、精准控制采样过程:操作者根据压力反馈信息,调整吸取力度和采样深度,便于确保每次采样都具有一致的力度和深度,增强了采样的准确性和可重复性。
9、3、避免样本污染:通过实时监测压力,便于操作者避免在采样过程中过度挤压或破坏样本,从而降低了样本污染和损坏的风险。
10、4、数据记录与分析:压力反馈提供了额外的数据,便于记录采样时施加的压力变化,这些数据可以用于进一步的分析,例如研究细菌在不同压力下的生长或细菌在不同环境中的适应能力等。
11、5、改善采样效率:通过根据压力反馈进行调整,便于提高采样效率,避免了无效的采样或重复的操作,节省了时间和资源。
12、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种带压力反馈的细菌采样吸嘴,包括吸嘴底座(1)和吸嘴头(3),其特征在于:所述吸嘴底座(1)上表面设置有卡块(11),所述吸嘴底座(1)周侧面设置有接触板(5),所述接触板(5)为电极片负极,所述吸嘴底座(1)下表面设置有伸缩杆(13),所述伸缩杆(13)下端与吸嘴头(3)固定连接,所述伸缩杆(13)周侧面设置有弹簧(2),所述弹簧(2)上端与吸嘴底座(1)固定连接,所述弹簧(2)下端与吸嘴头(3)固定连接,所述吸嘴头(3)周侧面设置有接触柱(4),所述接触柱(4)为电极片正极。
2.根据权利要求1所述的一种带压力反馈的细菌采样吸嘴,其特征在于,所述吸嘴底座(1)与外接机械臂连接,所述卡块(11)与外接机械臂的卡口之间卡装配合。
3.根据权利要求1所述的一种带压力反馈的细菌采样吸嘴,其特征在于,所述接触柱(4)为“l”形柱体结构,所述接触柱(4)的位置和大小均与接触板(5)相适应,所述接触柱(4)与接触板(5)之间相互配合。
技术总结
本发明公开了一种带压力反馈的细菌采样吸嘴,涉及细菌采样技术领域。本发明包括吸嘴底座和吸嘴头。本发明通过设置吸嘴底座、弹簧、吸嘴头、接触柱、接触板、卡块和伸缩杆,通过机械臂带动采样吸嘴至培养皿上方,然后带动吸嘴头下降至培养皿,采样吸嘴的吸嘴头接触到培养皿中的菌落时,弹簧受到阻力压缩,使接触柱与接触板接触,此时正负电极接触,给控制系统传送出去压力信号,系统接收到压力反馈后,控制机械臂动作将采样吸嘴吸取的菌落送至指定位置,完成细菌采样。本发明能够提供更精确、可控制的细菌采样方法,有助于确保采集到高质量的样本并提供额外的数据信息,进而促进了科学研究和实验的准确性和可靠性。
技术研发人员:张彦欣,王晓兵,张琦,张彦雷
受保护的技术使用者:青岛工发智能科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!