由远程驾驶、能源补给和地面航母组成的飞行器运保体系的制作方法
本发明涉及一种由远程驾驶员远程驾驶、飞行器地面航母提供换电系统提供续航保障和提供上下客服务的电动旋翼飞行器运行保障体系,属于物联网。
背景技术:
1、各类电动飞机发展面临的最大技术挑战是电动力推进系统关键性能指标低、技术不成熟、重量过大,仅能满足电动飞机的最低使用要求。电动力推进系统实用性、安全性和可靠性也有待提高。电动力推进系统重量过大是电动飞机设计的最大难题。对于氢燃料电池电动飞机,氢燃料存储和补给问题不容易解决,目前尽管一些技术试验机取得成功,但有人驾驶氢燃料电池电动飞机还需要发展完善,离实用还有一段距离。锂电池和太阳能电池等电动力推进系统关键部件成本高,电池的续航问题制约着电动飞机的发展。
技术实现思路
1、本发明针对现有电动旋翼飞行器不能自动更换电池,不能远程驾驶的缺点,提出了一种由远程驾驶员远程驾驶、飞行器地面航母提供换电系统续航保障和提供上下客服务,由飞行器远程驾驶指挥控制链路、飞行器远程驾驶数据通信链路、乘客服务数据通信链路、备用飞行器远程驾驶指挥控制链路、换电远程控制链路、换电现场控制链路和换电远程数据通信链路系统具体组成的电动旋翼飞行器运行保障体系。
2、本发明的有益效果:不占用城市道路只占用城市空间,带有远程驾驶加自动驾驶是给那些不会驾驶电动飞机的人提供共享电动旋翼飞行器。
技术特征:
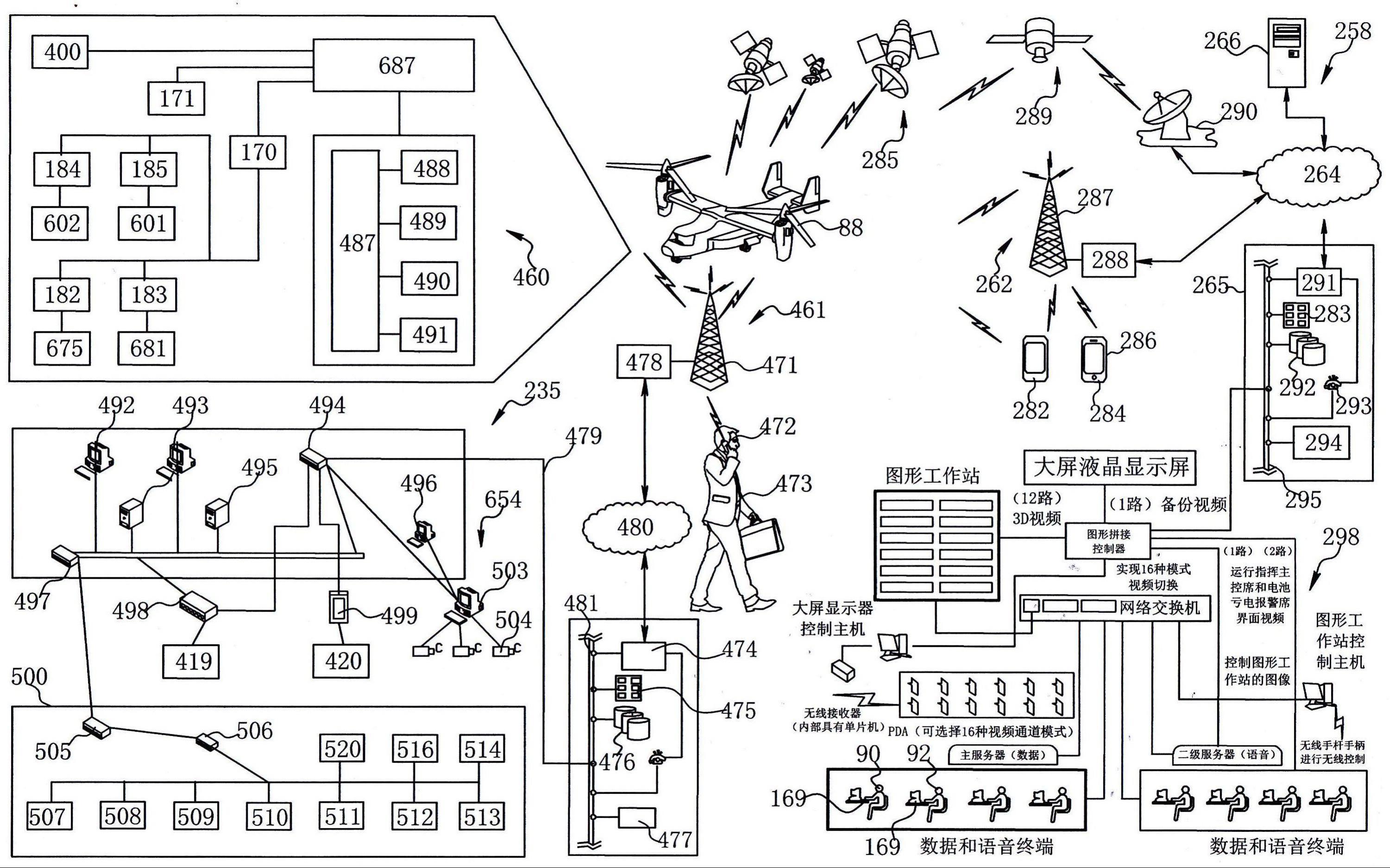
1.一种由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:飞行器远程驾驶指挥控制链路526包括:远程驾驶员91的左手持输入装置177、右手持输入装置178、第一脚踏板214和第二脚底板233与第二处理器215连接与第二处理器215连接,第二处理器215与远程控制台169连接,远程控制台169与远程控制系统298连接,远程控制系统298与第一有线和无线局域网295连接,第一有线和无线局域网295与第一交换机291连接,第一交换机291与第一地面网络264连接,第一地面网络264与第一无线载波系统262连接,第一无线载波系统262与第二无线载波系统400连接,第二无线载波系统400与多协议通信网络接入系统460连接,多协议通信网络接入系统460与飞行控制计算机687连接,飞行控制计算机687与第一机器人89连接,第一机器人89与第一机械手182、第二机械手183、第三机械手184和第四机械手185连接,第一机械手182、第二机械手183能够单独或者合在一起控制周期距杆677,第一机械手182、第二机械手183能够单独或者合在一起控制总距杆683,第三机械手184能够控制踏板690中右踏板602,第四机械手185能够控制踏板690中左踏板601,
2.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:飞行器远程驾驶指挥控制链路526包括:远程驾驶员91的左手持输入装置177、右手持输入装置178、第一脚踏板214和第二脚底板233与第二处理器215连接与第二处理器215连接,第二处理器215与远程控制台169连接,远程控制台169与远程控制系统298连接,远程控制系统298与第一有线和无线局域网295连接,第一有线和无线局域网295与第一交换机291连接,第一交换机291与第一地面网络264连接,第一地面网络264与第一无线载波系统262连接,第一无线载波系统262与第二无线载波系统400连接,第二无线载波系统400与多协议通信网络接入系统460连接,多协议通信网络接入系统460与飞行控制计算机687连接,飞行控制计算机687与第一机器人89连接,第一机器人89与第一机械手182、第二机械手183、第三机械手184和第四机械手185连接,第一机械手182、第二机械手183能够单独或者合在一起控制周期距杆677,第一机械手182、第二机械手183能够单独或者合在一起控制总距杆683,第三机械手184能够控制踏板690中右踏板602,第四机械手185能够控制踏板690中左踏板601。
3.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:左手持输入装置177和右主输入装置178通过无线通信与控制台169连接和分离,左手持输入装置177与第二处理器215连接,右手持输入装置178与第二处理器215连接,远程驾驶员91在远程控制台169激活第二处理器215后开始执行远程驾驶工作,远程驾驶员91的左手控制左手持输入装置177,左手持输入装置177通过第二处理器215控制第一机械手182手臂端197的移动,远程驾驶员91的右手控制右手持输入装置178,右手持输入装置178通过第二处理器215控制第二机械手183手臂端197的移动,第一机械手182手臂端197使用末端执行器193中的第一接触端194和第二接触端196与周期距杆677接触并握紧,第二机械手183手臂端197使用末端执行器193中的第一接触端194和第二接触端196与周期距杆677接触并握紧,通过左手持输入装置177和右手持输入装置178向相反的方向运动能够使周期距杆677转动,远程驾驶员91使用远程控制台169的第二处理器215软件控制第一机器人89的第一机械手182和第二机械手183,远程驾驶员91通过测量、模型估计、测量和建模来确定施加在第一机器人89第一机械手182和第二机械手183上用在周期距杆677上的力,第一机械手182和第二机械手183通过远程控制台169向远程驾驶员91提供触觉反馈,这种触觉反馈能够为远程驾驶员91模拟手动操纵手臂端197控制周期距杆677,能够为远程驾驶员91模拟由第一机器人89第一机械手182和第二机械手183经历的对应于周期距杆677的反作用力。
4.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:左手持输入装置177和右主输入装置178通过无线通信与控制台169连接和分离,左手持输入装置177与第二处理器215连接,右手持输入装置178与第二处理器215连接,远程驾驶员91在远程控制台169激活第二处理器215后开始执行远程驾驶工作,远程驾驶员91的左手控制左手持输入装置177,左手持输入装置177通过第二处理器215控制第一机械手182手臂端197的移动,远程驾驶员91的右手控制右手持输入装置178,右手持输入装置178通过第二处理器215控制第二机械手183手臂端197的移动,第一机械手182手臂端197使用末端执行器193中的第一接触端194和第二接触端196与总距杆683接触并握紧,第二机械手183手臂端197使用末端执行器193中的第一接触端194和第二接触端196与总距杆683接触并握紧,通过左手持输入装置177和右手持输入装置178向相反的方向运动能够使总距杆683转动,远程驾驶员91使用远程控制台169的第二处理器215软件控制第一机器人89的第一机械手182和第二机械手183,远程驾驶员91通过测量、模型估计、测量和建模来确定施加在第一机器人89和第二机器人90第一机械手182和第二机械手183上用在总距杆683上的力,第一机械手182和第二机械手183通过远程控制台169向远程驾驶员91提供触觉反馈,这种触觉反馈能够为远程驾驶员91模拟手动操纵手臂端197控制总距杆683,能够为远程驾驶员91模拟由第一机器人89第一机械手182和第二机械手183经历的对应于总距杆683的反作用力,
5.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:旋翼飞行器88的飞行器视觉系统400被配置成捕获旋翼飞行器88周围360°区域内的图像,飞行器视觉系统400的第一成像装置467安装在前挡风玻璃后面的位置,用于捕获旋翼飞行器88向前视场(fov)462的图像的前视摄像机,飞行器视觉系统400的第二成像装置466安装在旋翼飞行器88的后部用于捕获旋翼飞行器88的向后视场(fov)465的后视摄像机,飞行器视觉系统400的第三成像装置464安装在旋翼飞行器88的左侧用于捕获侧面视场(fov)463的侧视图像摄像机,飞行器视觉系统400的第四成像装置469安装在旋翼飞行器88的右侧用于捕获侧面视场(fov)468的侧视摄像机,飞行器视觉系统400的第五成像装置401安装在旋翼飞行器88的机身455的下部用于捕获机身下部视场(fov)402的视摄像机;在第一机械手182上安装第六成像装置406、在第二机械手183上安装第七成像装置407、在第三机械手184上安装第八成像装置408、在第四机械手185上安装第九成像装置409,在立柱256上安装第十成像装置410,第一成像装置到第十成像装置的成像系统都由视频采集设备120和雷达110组成,雷达110由激光雷达或毫米波雷达组成。
6.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:在驾驶舱456中把第一机器人89安装在主驾驶员位置274的座椅上,把第二机器人90安装在副驾驶员位置275的座椅上,驾驶员座椅173包括座椅靠背216、防潜梁217、防潜连杆机构219、第五连杆218、第六连杆230、第七连杆231和立柱256,把第一机器人89和第二机器人90被固定到驾驶座椅173上,在第一机器人89和第二机器人90的立柱256上安装的第一机械手182、第二机械手183、第三机械手184和第四机械手185能够上下左右和前后移动,远程驾驶员91用左手抓握左手持输入装置177,左手持输入装置177能够引起第一机器人89第一机械手182的移动,远程驾驶员91用右手抓握右手持输入装置178,右手持输入装置178能够引起第一机器人89第二机械手183的移动,远程驾驶员91用右脚连接第一脚踏板214,第一脚踏板214能够引起第一机器人89第三机械手184的移动,远程驾驶员91用左脚连接第二脚踏板233,第二脚踏板233能够引起第一机器人89第四机械手185的移动,第一机械手182和第二机械手183能够引起周期距杆677的移动,第一机械手182和第二机械手183能够引起总距杆683的移动,第三机械手184能够引起踏板690中右踏板602的移动;第四机械手185能够引起踏板690中左踏板601的移动。
7.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:在机身455的底部安装的前起落架548和后起落架549能够打开和收回,当旋翼飞行器88飞行时,前起落架548能够放入第一舱室550内,后起落架549能够放入第二舱室551内,旋翼飞行器88机身包括前部驾驶舱456、机身中部457和机身的尾部526,尾部526用作竖向稳定器,中部457由中间层535分隔,该中间层535将形成机舱空间的顶部隔室536和形成设备空间的底部隔室552分开,从该旋翼飞行器88的前部到后部延伸,用于加固覆盖层552的构件包括538、539等纵向加固件和横向第一框架540、第二框架541、第三框架542、第四框架543、第五框架544和第六框架545,机身的承重顶层546固定到机身中部457的两个在中部的第一框架540和第二框架541,承重中间层535固定于两个在中部的第一框架540和第二框架541,顶层546固定于两个在中部的第一框架540和第二框架541,中间层535固定于横向第一框架540、第二框架541、第三框架542、第四框架543、第五框架544和第六框架545,中间层535沿机身455中部457向旋翼飞行器88的前部延伸进入驾驶舱456和向旋翼飞行器88的后部朝向机身的尾部526延伸,中间层535在机身中部457使顶部隔室536和底部隔室552分开,在驾驶舱456中在中间层535前端安装设备层547,在底部隔室552的中间层535的下面悬挂机载电池箱更换系统568,底部隔室552在中间层535和机身的侧部553之间,在底部隔室552的底部设置敞开底部554,顶层546与机翼525连接,
8.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:旋翼飞行器88的电传飞行控制系统405包括的周期距控制组件675中的周期距杆677、总距控制组件681中的总距杆683、踏板控制组件689中的踏板690、飞行器传感器691、第一电动机控制计算机458、第二电动机控制计算机459、第一机器人89、第二机器人90、飞行器视觉系统400、多协议通信网络接入系统460都与飞行控制计算机687连接,飞行控制计算机687能够分析远程驾驶员91的输入并且向第一电动机控制计算机458、第二电动机控制计算机459和尾部526竖向稳定器发送相应的命令,飞行控制计算机687通过与远程驾驶员91飞行控制装置相关联的传感器来接收来远程驾驶员91控制装置的输入命令,飞行控制计算机687还对远程驾驶员91控制装置的触觉提示命令进行控制,在仪表板454上的仪表中显示信息,第一电动机控制计算机458控制第一变速箱523,能够改变第一旋翼系统521的输出动力控制第一旋翼桨叶522旋转速度,在直升机模式中,第一电动机控制计算机458控制第一短舱524近似竖向,在飞机模式中,第一电动机控制计算机458控制第一短舱524近似水平,第二电动机控制计算机459控制第二变速箱529,能够改变第二旋翼系统527的输出动力控制第二旋翼桨叶528旋转速度,在直升机模式中,第二电动机控制计算机459控制第二短舱530近似竖向在飞机模式中,第二电动机控制计算机459控制第二短舱530近似水平,飞行控制计算机691用于测量旋翼飞行器88系统、飞行参数的传感器。
9.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:飞行器地面母舰170从下至上设置有多层结构,旋翼飞行器换电主站235设置在第一层647以下,第2层648和以上为旋翼飞行器88立体机场,顶层652为旋翼飞行器88停机坪,在每层设有旋翼飞行器88着陆工作区域93、旋翼飞行器88乘客473的乘客上下工作区域94、旋翼飞行器88的电池箱更换区域95和旋翼飞行器88的起飞工作区域96,旋翼飞行器88在着陆工作区93上完成降落后,工作人员驾驶飞机牵引车649至飞机前起落架548前与前起落架548连接,随后在空管系统引导下飞机牵引车649牵引旋翼飞行器88至乘客上下工作区域94完成乘客上下,随后飞机牵引车649牵引旋翼飞行器88进入电池箱更换区域95,随后飞机牵引车649牵引旋翼飞行器88进入起飞工作区域96准备起飞,
10.根据权利要求1所述的由远程驾驶、能源补给和地面航母组成的飞行器运保体系,其特征是:飞行器远程驾驶指挥控制链路526包括:远程驾驶员91的左手持输入装置177、右手持输入装置178、第一脚踏板214和第二脚底板233与第二处理器215连接与第二处理器215连接,第二处理器215与远程控制台169连接,远程控制台169与远程控制系统298连接,远程控制系统298与第一有线和无线局域网295连接,第一有线和无线局域网295与第一交换机291连接,第一交换机291与第一地面网络264连接,第一地面网络264与第一无线载波系统262连接,第一无线载波系统262与第二无线载波系统400连接,第二无线载波系统400与多协议通信网络接入系统460连接,多协议通信网络接入系统460与飞行控制计算机687连接,飞行控制计算机687与第一机器人89连接,第一机器人89与第一机械手182、第二机械手183、第三机械手184和第四机械手185连接,第一机械手182、第二机械手183能够单独或者合在一起控制周期距杆677,第一机械手182、第二机械手183能够单独或者合在一起控制总距杆683,第三机械手184能够控制踏板690中右踏板602,第四机械手185能够控制踏板690中左踏板601,
技术总结
一种远程驾驶、能源补给和地面航母组成的飞行器运保体系本发明针对现有电动旋翼飞行器不能自动更换电池,不能远程驾驶的缺点,提出了一种由远程驾驶员远程驾驶、飞行器地面航母提供换电系统续航保障和提供上下客服务,由系统飞行器远程驾驶指挥控制链路、飞行器远程驾驶数据通信链路、乘客服务数据通信链路、备用飞行器远程驾驶指挥控制链路、换电远程控制链路、换电现场控制链路和换电远程数据通信链路系统具体组成的电动旋翼飞行器运行保障体系。
技术研发人员:韩磊,韩宛蕙
受保护的技术使用者:岳秀兰
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!