重型车盲区监测及预警系统
1.本发明涉及盲区预警系统技术领域,特别涉及重型车盲区监测及预警系统。
背景技术:
2.现有技术从三个方向着手解决视线盲区问题,第一种通过汽车改装后视镜或可透视辅助眼镜消除视线盲区,这会在消除视线盲区的同时转移驾驶员部分注意力,提高了危险系数;第二种方法利用超声波、红外线、雷达、摄像等检测障碍物与车体的距离,将车身周围环境拼接到中控台上供驾驶员观察,这种方法延长驾驶员反应时间,致使操作不及时操作不当;第三种方法利用v2x技术将行人车辆道路等连接到一块获取相互信息解决视线盲区问题,这种方法实现较困难,落地成本大。
技术实现要素:
3.本发明的目的是提供重型车盲区监测及预警系统,其通过获取车辆盲区视野,实时监测车身周围移动物,并为其划分危险等级来进行直接预警,提高了安全性。
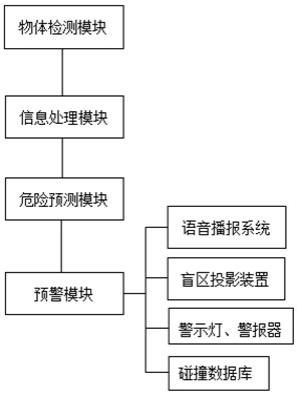
4.本发明的上述技术目的是通过以下技术方案得以实现的:一种重型车盲区监测及预警系统,包括:物体检测模块,用于获取重型车盲区内的物体检测信息;信息处理模块,用于对检测信息进行分析,记录盲区内物体的运动位置以及运动状态;危险预测模块,用于根据盲区内物体的位置和运动状态,划分其危险系数;预警模块,用于根据最高危险系数发出预警信息,预警信息包括对车内驾驶员进行预警的驾驶侧信息以及对车外行人或车辆进行警示的车外预警信息。
5.更进一步地,所述物体检测模块包括若干雷达,雷达用于感应盲区内最接近的障碍物。
6.更进一步地,检测信息的分析包括识别盲区内的物体,将识别出的物体进行分类,并跟踪定位各物体。
7.更进一步地,危险预测模块根据物体运动位置以及运动状态,计算当前车速以及当前物体当前速度状态下,车身与该物体的相撞时间t,预计不相撞时,相撞时间t取预设值t
m
,并根据物体与车身之间的横向距离l与预测相撞时间t划分危险系数。
8.更进一步地,所述危险系数分为0~3级,l
0~3
与t
0~3
为预设定值,t
m
≥t1,l1≤l≤l0或t≥t1时,危险系数=1;l2≤l<l1或t2≤t<t1时,危险系数=2;l<l2或t<t2时,危险系数=3。
9.更进一步地,所述预警模块包括包括语音播报系统,最高危险系数=1时,驾驶侧信息通过语音播报系统提示“注意,有车辆或行人进入视野盲区,请谨慎驾驶”;危险系数=2时,驾驶侧信息通过语音播报系统提示“警报,有车辆或行人失控风
险,请减速慢行”;危险系数=3时,驾驶侧信息通过语音播报系统提示“危险!请停车检查”。
10.更进一步地,所述预警模块还包括用于指示车辆盲区位置的盲区投影装置,危险系数=1且投影功能启用时,盲区投影装置开启。
11.更进一步地,所述预警模块还包括车身处连接的若干警示灯以及警报器,危险系数=2时,车外预警信息包括警示灯闪烁;危险系数=3时,车外预警信息包括警示灯闪烁以及警报器鸣叫。
12.更进一步地,所述预警模块还包括直行和转弯碰撞数据库,危险系数≥2时,预警模块根据物体运动位置以及运动状态对应直行和转弯碰撞数据库,输出最优动作解,并由驾驶侧信息通过语音播报系统进行提示。
13.综上所述,本发明具有以下有益效果:通过获取车辆盲区视野,实时监测车身周围移动物,并为其划分危险等级来进行直接预警,预警模块包括了驾驶侧信息和车外预警信息,不仅提示驾驶员盲区信息和操作建议,还提示车外车辆或行人以盲区范围和警示,提高驾驶安全性。
附图说明
14.图1是本发明的结构原理示意图。
具体实施方式
15.下面结合附图对本发明的具体实施方式作进一步说明,本实施例不构成对本发明的限制。
16.一种重型车盲区监测及预警系统,如图1所示,包括:物体检测模块,用于获取重型车盲区内的物体检测信息;物体检测模块包括摄像和若干雷达,雷达用于感应盲区内最接近的障碍物,摄像和雷达开启数据融合,进行360度辅助检测;信息处理模块,用于对检测信息进行分析,记录盲区内物体的运动位置以及运动状态;对检测信息的分析包括识别盲区内的物体,将识别出的物体进行分类,并跟踪定位各物体,其可以定位分析所有盲区内的物体,也可以只分析最接近的若干目标;危险预测模块,用于根据盲区内物体的位置和运动状态,划分其危险系数;具体的,危险预测模块根据物体运动位置以及运动状态,计算当前车速以及当前物体当前速度状态下,车身与该物体的相撞时间t,预计不相撞时,相撞时间t取预设值t
m
,并根据物体与车身之间的横向距离l与预测相撞时间t划分危险系数;其中,危险系数分为0~3级,l
0~3
与t
0~3
为预设定值,t
m
≥t1,l1≤l≤l0或t≥t1时,危险系数=1;l2≤l<l1或t2≤t<t1时,危险系数=2;l<l2或t<t2时,危险系数=3,本实施例中,t2为设定的反应时间,取1.5s,l2为设定的反应距离,取0.1m,t1取2*t2,l0取盲区最大横向距离,l1取(l0+l2)/2。
17.预警模块,用于根据最高危险系数发出预警信息,预警信息包括对车内驾驶员进
行预警的驾驶侧信息以及对车外行人或车辆进行警示的车外预警信息;预警模块包括包括车内语音播报系统,最高危险系数=1时,驾驶侧信息通过语音播报系统提示“注意,有车辆或行人进入视野盲区,请谨慎驾驶”;危险系数=2时,驾驶侧信息通过语音播报系统提示“警报,有车辆或行人失控风险,请减速慢行”;危险系数=3时,驾驶侧信息通过语音播报系统提示“危险!请停车检查”。
18.预警模块还包括用于指示车辆盲区位置的盲区投影装置以及控制盲区投影装置启闭的光感传感器(或能见度传感器),光感传感器感应到车外能见度低于设定值时,控制投影功能开关开启,当危险系数=1时,盲区投影装置开启。
19.车身处连接有若干警示灯以及警报器,危险系数=2时,车外预警信息包括警示灯闪烁;危险系数=3时,车外预警信息包括警示灯闪烁以及警报器鸣叫。
20.预警模块还包括预设的直行和转弯碰撞数据库,划分各位置区间以及运动速度区间等状态下的最优动作解,危险系数≥2时,预警模块根据物体运动位置以及运动状态对应直行和转弯碰撞数据库,输出最优动作解,并由驾驶侧信息通过语音播报系统进行提示。
21.以上所述,仅是本发明的较佳实施例而已,不用于限制本发明,本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明技术方案的保护范围内。
技术特征:
1.一种重型车盲区监测及预警系统,其特征在于:包括:物体检测模块,用于获取重型车盲区内的物体检测信息;信息处理模块,用于对检测信息进行分析,记录盲区内物体的运动位置以及运动状态;危险预测模块,用于根据盲区内物体的位置和运动状态,划分其危险系数;预警模块,用于根据最高危险系数发出预警信息,预警信息包括对车内驾驶员进行预警的驾驶侧信息以及对车外行人或车辆进行警示的车外预警信息。2.根据权利要求1所述的重型车盲区监测及预警系统,其特征在于:所述物体检测模块包括若干雷达,雷达用于感应盲区内最接近的障碍物。3.根据权利要求1或2所述的重型车盲区监测及预警系统,其特征在于:检测信息的分析包括识别盲区内的物体,将识别出的物体进行分类,并跟踪定位各物体。4.根据权利要求1所述的重型车盲区监测及预警系统,其特征在于:危险预测模块根据物体运动位置以及运动状态,计算当前车速以及当前物体当前速度状态下,车身与该物体的相撞时间t,预计不相撞时,相撞时间t取预设值t
m
,并根据物体与车身之间的横向距离l与预测相撞时间t划分危险系数。5.根据权利要求4所述的重型车盲区监测及预警系统,其特征在于:所述危险系数分为0~3级,l
0~2
与t
0~2
为预设定值,t
m
≥t1,l1≤l≤l0或t≥t1时,危险系数=1;l2≤l<l1或t2≤t<t1时,危险系数=2;l<l2或t<t2时,危险系数=3。6.根据权利要求5所述的重型车盲区监测及预警系统,其特征在于:所述预警模块包括包括语音播报系统,最高危险系数=1时,驾驶侧信息通过语音播报系统提示“注意,有车辆或行人进入视野盲区,请谨慎驾驶”;危险系数=2时,驾驶侧信息通过语音播报系统提示“警报,有车辆或行人失控风险,请减速慢行”;危险系数=3时,驾驶侧信息通过语音播报系统提示“危险!请停车检查”。7.根据权利要求5或6所述的重型车盲区监测及预警系统,其特征在于:所述预警模块还包括用于指示车辆盲区位置的盲区投影装置,危险系数=1且投影功能启用时,盲区投影装置开启。8.根据权利要求5或6所述的重型车盲区监测及预警系统,其特征在于:所述预警模块还包括车身处连接的若干警示灯以及警报器,危险系数=2时,车外预警信息包括警示灯闪烁;危险系数=3时,车外预警信息包括警示灯闪烁以及警报器鸣叫。9.根据权利要求5所述的重型车盲区监测及预警系统,其特征在于:所述预警模块还包括直行和转弯碰撞数据库,危险系数≥2时,预警模块根据物体运动位置以及运动状态对应直行和转弯碰撞数据库,输出最优动作解,并由驾驶侧信息通过语音播报系统进行提示。
技术总结
本发明公开了一种重型车盲区监测及预警系统,涉及盲区预警系统技术领域,解决了现有的视线盲区预警方法会转移驾驶员部分注意力等问题。包括:物体检测模块,用于获取重型车盲区内的物体检测信息;信息处理模块,用于对检测信息进行分析,记录盲区内物体的运动位置以及运动状态;危险预测模块,用于根据盲区内物体的位置和运动状态,划分其危险系数;预警模块,用于根据最高危险系数发出预警信息,预警信息包括对车内驾驶员进行预警的驾驶侧信息以及对车外行人或车辆进行警示的车外预警信息。达到了通过获取车辆盲区视野,实时监测车身周围移动物,并为其划分危险等级来进行直接预警,提高安全性的效果。提高安全性的效果。提高安全性的效果。
技术研发人员:冯梦琦 费明浩 蔡欣呈 丁天澄 汪涛 黄淑仪
受保护的技术使用者:南通理工学院
技术研发日:2021.07.14
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1