一种驾驶员疲劳驾车时自动驾驶介入的控制方法与系统与流程
1.本发明属于疲劳驾驶领域,具体涉及一种驾驶员疲劳驾车时自动驾驶介入的控制方法与系统。
背景技术:
2.科学技术的日新月异促进汽车安全技术的飞速发展。其中,疲劳监测技术已经较为普及。目前市场上的疲劳监测技术,主要是用于当检测到驾驶员处于疲劳状态时,通过声音报警、文字报警或者方向盘振动等方式来提醒驾驶员。可以有效减少驾驶员疲劳状态驾车时可能导致的事故风险。
3.但是此项功能只考虑到通过报警提醒驾驶员,未考虑到当驾驶员处于极度疲劳时,提醒驾驶员无效的情况,同样会导致安全事故。
技术实现要素:
4.本发明的目的在于,提供一种驾驶员疲劳驾车时自动驾驶介入的控制方法与系统,通过自动驾驶介入的方式,确保驾乘的安全。
5.为解决上述技术问题,本发明的技术方案为:一种驾驶员疲劳驾车时自动驾驶介入的控制方法,包括以下步骤:
6.在车辆行驶中,检测驾驶员状态,获取驾驶员疲劳状态信息,当驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,车辆自动进入自动驾驶模式;
7.驾驶员疲劳状态信息至少包括一段时间内驾驶员单次的闭眼时长、一段时间内低头的持续时间和一段时间内驾驶员打哈欠的持续时间;
8.极度疲劳条件至少包括一段时间内驾驶员单次的闭眼时长超过第一阈值;一段时间内低头的持续时间超过第二阈值;一段时间内驾驶员打哈欠的持续时间超过第三阈值。
9.还包括该控制方法的启动条件,启动条件至少包括:车载摄像头运行正常且档位处于前进档。
10.自动驾驶模式包括高速自动驾驶模式和交通拥堵自动驾驶模式,当驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,车辆通过定位模块获取车辆位置信息,当车辆处于高速公路上时,进入高速自动驾驶模式;当车辆不处于高速公路上时,进入交通拥挤自动驾驶模式。
11.还包括以下步骤:在车辆进入自动驾驶模式之后,通过语音和文字提醒驾驶员已进入自动驾驶模式。
12.还包括以下步骤:在车辆进入自动驾驶模式之后,自动驾驶导航至最近的避险区或最近的服务区。
13.第一阈值、第二阈值和第三阈值均为1.5秒。
14.还提供一种使用如上述的一种驾驶员疲劳驾车时自动驾驶介入的控制方法的系统,包括:
15.采集模块,用于在车辆行驶中,检测驾驶员状态,获取驾驶员疲劳状态信息;
16.判断模块,用于判断驾驶员疲劳状态信息是否符合极度疲劳条件;
17.辅助模块,用于在驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,自动进入自动驾驶模式;
18.驾驶员疲劳状态信息至少包括一段时间内驾驶员单次的闭眼时长、一段时间内低头的持续时间和一段时间内驾驶员打哈欠的持续时间;
19.极度疲劳条件至少包括一段时间内驾驶员单次的闭眼时长超过第一阈值;一段时间内低头的持续时间超过第二阈值;一段时间内驾驶员打哈欠的持续时间超过第三阈值。
20.还包括该系统的启动条件,启动条件至少包括:采集模块中的车载摄像头运行正常且档位处于前进档。
21.自动驾驶模式包括高速自动驾驶模式和交通拥堵自动驾驶模式,当驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,车辆通过定位模块获取车辆位置信息,当车辆处于高速公路上时,进入高速自动驾驶模式;当车辆不处于高速公路上时,进入交通拥挤自动驾驶模式。
22.还包括组合仪表模块,用于在车辆进入自动驾驶模式之后,通过语音和文字提醒驾驶员已进入自动驾驶模式。
23.与现有技术相比,本发明的有益效果为:
24.当驾驶员处于极度疲劳时,常规提醒方式无效时,通过自动驾驶介入的方式,确保驾乘的安全。
附图说明
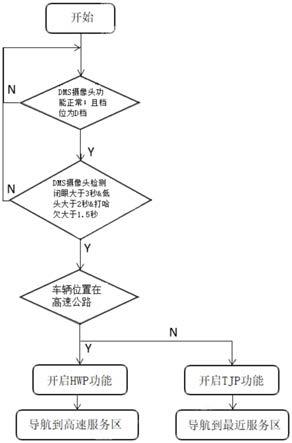
25.图1为本发明实施例实现的流程示意图;
26.图2为本发明实施例的系统结构示意图。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
28.为实现上述目的,本发明采取以下技术方案:当dms红外摄像头监测到驾驶员眼部区域(开/闭距离、闭合频率、凝视方向、眼皮运动)、嘴巴区域(开/闭距离,打哈欠频率)、头部区域(点头、左右转动、头部运动)、面部区域(不同的表情)达到系统定义的极度疲劳范围时,通知adas系统,adas系统接收到dms摄像头发过来的信息,同时结合ems/vcu发过来的车速信息和ihu/高精定位模块发过来的车辆位置信息,自动启动高级别自动驾驶hwp(高速自动驾驶)/tjp(交通拥堵自动驾驶),同时通过声音和文字提醒驾驶员已启动自动驾驶功能。图1为该系统实现的流程示意图,图2为该系统的连接结构示意图。
29.2.工作条件
30.该系统工作的条件如表1:
31.表1
[0032][0033]
3.功能描述
[0034]
一种驾驶员疲劳驾车时自动驾驶介入的控制方法是指当dms红外摄像头,监测到驾驶员眼部区域(开/闭距离、闭合频率、凝视方向、眼皮运动)、嘴巴区域(开/闭距离,打哈欠频率)、头部区域(点头、左右转动、头部运动)、面部区域(不同的表情)达到系统定义的极度疲劳范围时,通知adas系统,adas系统接收到dms摄像头发过来的信息,同时结合ems/vcu发过来的车速信息和ihu/高精定位模块发过来的车辆位置信息,自动启动高级别自动驾驶hwp/tjp功能,同时通过声音和文字提醒驾驶员已启动自动驾驶功能。车辆根据地图数据,自动驾驶到高速服务区或附近的停车场。
[0035]
该系统的功能逻辑如表2所示:
[0036]
表2
[0037][0038]
以上所述为智力成果的较佳实施例而已,但本智力成果不应该局限于该实施例和附图所公开的内容。所以凡是不脱离本智力成果所公开的精神下完成的等效或修改,都落入本智力成果保护的范围。
技术特征:
1.一种驾驶员疲劳驾车时自动驾驶介入的控制方法,其特征在于,包括以下步骤:在车辆行驶中,检测驾驶员状态,获取驾驶员疲劳状态信息,当驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,车辆自动进入自动驾驶模式;驾驶员疲劳状态信息至少包括一段时间内驾驶员单次的闭眼时长、一段时间内低头的持续时间和一段时间内驾驶员打哈欠的持续时间;极度疲劳条件至少包括一段时间内驾驶员单次的闭眼时长超过第一阈值;一段时间内低头的持续时间超过第二阈值;一段时间内驾驶员打哈欠的持续时间超过第三阈值。2.根据权利要求1所述的一种驾驶员疲劳驾车时自动驾驶介入的控制方法,其特征在于,还包括该控制方法的启动条件,启动条件至少包括:车载摄像头运行正常且档位处于前进档。3.根据权利要求1所述的一种驾驶员疲劳驾车时自动驾驶介入的控制方法,其特征在于,自动驾驶模式包括高速自动驾驶模式和交通拥堵自动驾驶模式,当驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,车辆通过定位模块获取车辆位置信息,当车辆处于高速公路上时,进入高速自动驾驶模式;当车辆不处于高速公路上时,进入交通拥挤自动驾驶模式。4.根据权利要求1所述的一种驾驶员疲劳驾车时自动驾驶介入的控制方法,其特征在于,还包括以下步骤:在车辆进入自动驾驶模式之后,通过语音和文字提醒驾驶员已进入自动驾驶模式。5.根据权利要求1所述的一种驾驶员疲劳驾车时自动驾驶介入的控制方法,其特征在于,还包括以下步骤:在车辆进入自动驾驶模式之后,自动驾驶导航至最近的避险区或最近的服务区。6.根据权利要求1所述的一种驾驶员疲劳驾车时自动驾驶介入的控制方法,其特征在于,第一阈值、第二阈值和第三阈值均为1.5秒。7.一种使用如权利要求1所述的一种驾驶员疲劳驾车时自动驾驶介入的控制方法的系统,其特征在于,包括:采集模块,用于在车辆行驶中,检测驾驶员状态,获取驾驶员疲劳状态信息;判断模块,用于判断驾驶员疲劳状态信息是否符合极度疲劳条件;辅助模块,用于在驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,自动进入自动驾驶模式;驾驶员疲劳状态信息至少包括一段时间内驾驶员单次的闭眼时长、一段时间内低头的持续时间和一段时间内驾驶员打哈欠的持续时间;极度疲劳条件至少包括一段时间内驾驶员单次的闭眼时长超过第一阈值;一段时间内低头的持续时间超过第二阈值;一段时间内驾驶员打哈欠的持续时间超过第三阈值。8.根据权利要求7所述的系统,其特征在于,还包括该系统的启动条件,启动条件至少包括:采集模块中的车载摄像头运行正常且档位处于前进档。9.根据权利要求7所述的系统,其特征在于,自动驾驶模式包括高速自动驾驶模式和交通拥堵自动驾驶模式,当驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,车辆通过定位模块获取车辆位置信息,当车辆处于高速公路上时,进入高速自动驾驶模式;当车辆不处于高速公路上时,进入交通拥挤自动驾驶模式。
10.根据权利要求7所述的系统,其特征在于,还包括组合仪表模块,用于在车辆进入自动驾驶模式之后,通过语音和文字提醒驾驶员已进入自动驾驶模式。
技术总结
本发明公开了一种驾驶员疲劳驾车时自动驾驶介入的控制方法与系统,包括以下步骤:在车辆行驶中,检测驾驶员状态,获取驾驶员疲劳状态信息,当驾驶员疲劳状态信息符合极度疲劳条件其中一项条件时,车辆自动进入自动驾驶模式;驾驶员疲劳状态信息至少包括一段时间内驾驶员单次的闭眼时长、一段时间内低头的持续时间和一段时间内驾驶员打哈欠的持续时间;极度疲劳条件至少包括一段时间内驾驶员单次的闭眼时长超过第一阈值;一段时间内低头的持续时间超过第二阈值;一段时间内驾驶员打哈欠的持续时间超过第三阈值。本发明能在驾驶员处于极度疲劳时,常规提醒方式无效时,通过自动驾驶介入的方式,确保驾乘的安全。确保驾乘的安全。确保驾乘的安全。
技术研发人员:刘千韦 李明虎 胡华军 卢鹏飞 刘春华
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:2021.09.22
技术公布日:2022/1/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1