一种辅助驾驶方法、系统、车辆及存储介质与流程
本申请涉及智能驾驶,特别涉及一种辅助驾驶方法、系统、车辆及存储介质。
背景技术:
1、adas(advanced driver ass istance systems,高级驾驶辅助系统)目前已经成为越来越多车型以及用户青睐的产品,集成式巡航系统就是其中一个子功能,该功能在一定条件下,可同时辅助驾驶员自动控制方向盘、刹车、油门,用户可短时间处于脱手脱脚的驾驶状态,但是普通的集成式巡航仅可实现单车道内定速巡航(前方无车辆跟着车道线行驶)或者跟车行驶(本目标车辆行驶车道前方有低速车辆行驶),大部分场景下可做到舒适控车并且与前方车辆保持安全距离。
2、由于大部分集成式巡航功能,功能激活时却忽略了目标车辆后方行驶的车辆,因此逐渐的功能拓展后,一种叫后碰撞预警的系统逐渐产生,后碰撞预警系统主要是基于安装在车辆后保险杠内的两颗毫米波雷达探测环境感知识别,不断发射电磁波,并接收障碍物反射回来的信号,经过控制器处理,当探测到后方有车辆靠近时,系统即发出图像和声音报警,提醒用户接管车辆控制权,
3、很多情况下,在小型车辆靠近时,无需进行报警,但是现有的后碰撞预警系统不会区分车辆类型,存在很多误报警,报警次数频繁,进而对用户造成不必要干扰,用户体验较差。
4、因此,在开启后碰撞预警系统时,如何减少对用户造成的不必要干扰,提升用户体验,是一亟待解决的技术问题。
技术实现思路
1、本申请提供一种辅助驾驶方法、系统、车辆及存储介质,用以减少对用户造成的不必要干扰,提升用户体验。
2、本申请提供一种辅助驾驶方法,包括:
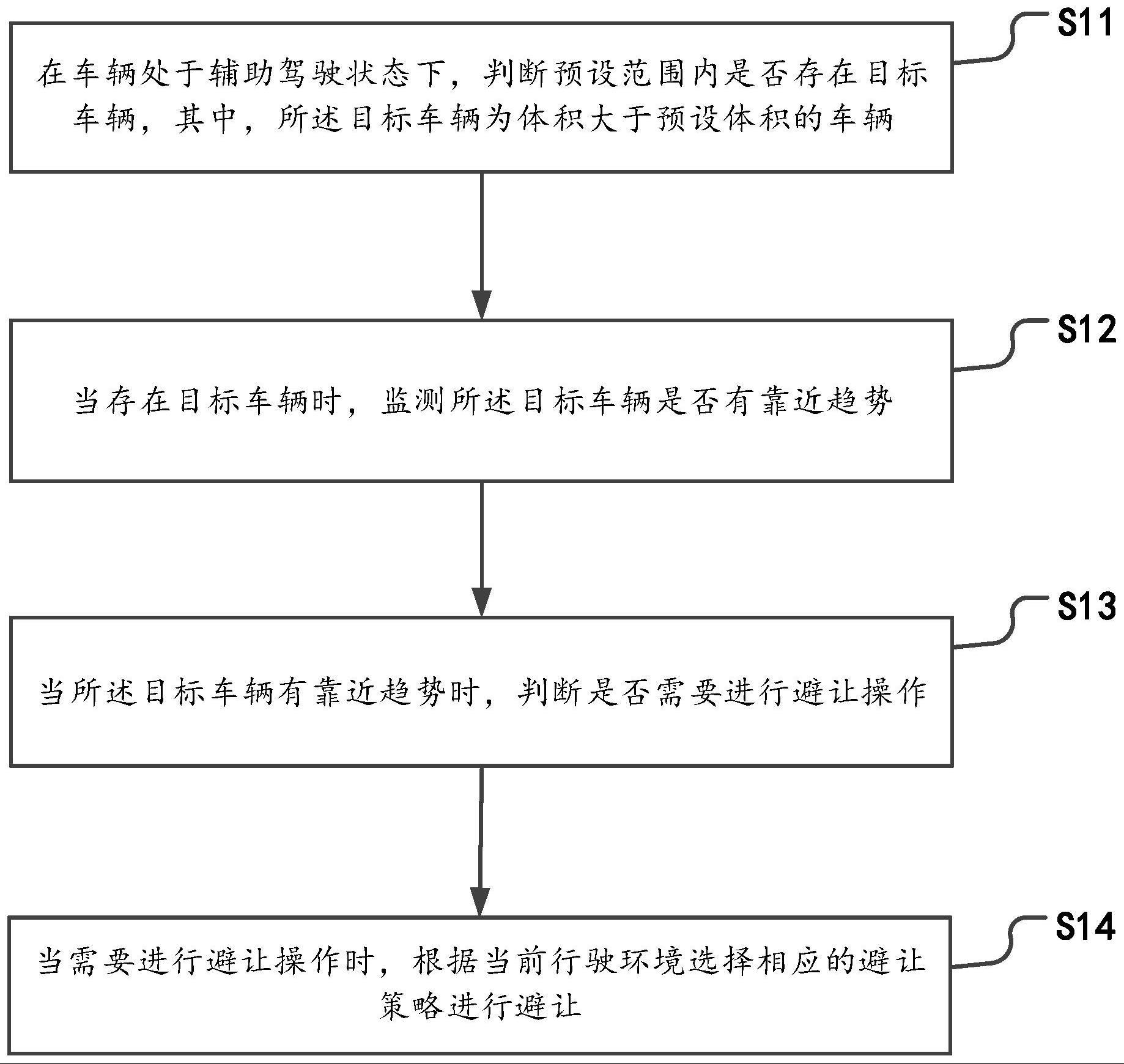
3、在车辆处于辅助驾驶状态下,判断预设范围内是否存在目标车辆,其中,所述目标车辆为体积大于预设体积的车辆;
4、当存在目标车辆时,监测所述目标车辆是否有靠近趋势;
5、当所述目标车辆有靠近趋势时,判断是否需要进行避让操作;
6、当需要进行避让操作时,根据当前行驶环境选择相应的避让策略进行避让。
7、本申请的有益效果在于:在汽车处于辅助驾驶状态下,当体积大于预设体积的目标车辆有靠近趋势时,判断是否需要进行避让操作;当需要进行避让操作时,根据当前行驶环境选择相应的避让策略进行避让,从而在车辆处于辅助驾驶状态下实现对目标车辆的自动避让,并且,避让策略只针对体积大于预设体积的目标车辆,而非所有车辆,因此,减少了对用户造成的不必要干扰,提升了用户体验。
8、在一个实施例中,所述监测所述目标车辆是否有靠近趋势,包括:
9、根据预设时间间隔向所述目标车辆发送电磁波;
10、根据电磁波的收发时间差值确定目标车辆的位置信息变化;
11、根据所述目标车辆的位置信息变化确定所述目标车辆是否有靠近趋势。
12、在一个实施例中,所述监测所述目标车辆是否有靠近趋势,包括:
13、根据预设时间间隔获取目标车辆的连续多帧图像;
14、根据连续多帧图像中目标车辆在图像中的面积占比进行比对;
15、当比对结果表征所述目标车辆在图像中的面积占比逐渐增大时,确定所述目标车辆有靠近趋势。
16、在一个实施例中,所述根据当前行驶环境选择相应的避让策略进行避让,包括:
17、获取与周围车辆之间的距离;
18、当与前方车辆之间的距离大于第一预设距离,且与侧面同向行驶的车辆之间的距离小于第二预设距离时,通过加速策略进行避让。
19、在一个实施例中,所述根据当前行驶环境选择相应的避让策略进行避让,包括:
20、获取与周围障碍物之间的距离;
21、当与前方车辆之间的距离小于第一预设距离,且与侧面同向行驶的车辆之间的距离大于第二预设距离时,通过变道策略进行避让。
22、在一个实施例中,所述判断预设范围内是否存在目标车辆,包括:
23、根据雷达模块和摄像头收集预设范围内的其他车辆的图像;
24、根据所述其他车辆的图像获取所述其他车辆的体积;
25、当存在体积大于预设体积的其他车辆时,确定所述体积大于预设体积的其他车辆为所述目标车辆。
26、本申请还提供了一种车辆,包括:
27、自动驾驶控制器,用于实现上述任一项实施例所记载的辅助驾驶方法;
28、雷达,用于发射电磁波,并接收回波,根据收发之间的时间差测得目标车辆的位置数据,并将目标车辆的位置数据发送给所述自动驾驶控制器;
29、摄像头,用于获取所述车辆周围的其他车辆的图像以及当前行驶环境图像,并将其他车辆的图像以及当前行驶环境图像发送给所述自动驾驶控制器。
30、在一个实施例中,所述雷达包括:角毫米波雷达以及前毫米波雷达,其中,所述角毫米波雷达安装于前后保内左右两侧,所述前毫米波雷达安装于车辆牌照正下方。
31、本申请还提供一种辅助驾驶系统,包括:
32、至少一个处理器;以及,
33、与所述至少一个处理器通信连接的存储器;其中,
34、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行以实现上述任一实施例中所记载的辅助驾驶方法。
35、本申请还提供一种计算机存储介质,当存储介质中的指令由辅助驾驶系统对应的处理器执行时,使得辅助驾驶系统能够实现上述任一项实施例所记载辅助驾驶方法。
36、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
37、下面通过附图和实施例,对本申请的技术方案做进一步的详细描述。
技术特征:
1.一种辅助驾驶方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述监测所述目标车辆是否有靠近趋势,包括:
3.如权利要求1所述的方法,其特征在于,所述监测所述目标车辆是否有靠近趋势,包括:
4.如权利要求1所述的方法,其特征在于,所述根据当前行驶环境选择相应的避让策略进行避让,包括:
5.如权利要求1所述的方法,其特征在于,所述根据当前行驶环境选择相应的避让策略进行避让,包括:
6.如权利要求1所述的方法,其特征在于,所述判断预设范围内是否存在目标车辆,包括:
7.一种车辆,其特征在于,包括:
8.如权利要求7所述的车辆,其特征在于,所述雷达包括:角毫米波雷达以及前毫米波雷达,其中,所述角毫米波雷达安装于前后保内左右两侧,所述前毫米波雷达安装于车辆牌照正下方。
9.一种辅助驾驶系统,其特征在于,包括:
10.一种计算机存储介质,其特征在于,当存储介质中的指令由辅助驾驶系统对应的处理器执行时,使得辅助驾驶系统能够实现如权利要求1-6任一项所述的辅助驾驶方法。
技术总结
本申请公开了一种辅助驾驶方法、系统、车辆及存储介质,用以减少对用户造成的不必要干扰,提升用户体验。所述方法包括:在车辆处于辅助驾驶状态下,判断预设范围内是否存在目标车辆,其中,目标车辆为体积大于预设体积的车辆;当存在目标车辆时,监测目标车辆是否有靠近趋势;当目标车辆有靠近趋势时,判断是否需要进行避让操作;当需要进行避让操作时,根据当前行驶环境选择相应的避让策略进行避让。采用本申请所提供的方案,当需要进行避让操作时,根据当前行驶环境选择相应的避让策略进行避让,从而在车辆处于辅助驾驶状态下实现对目标车辆的自动避让,并且,避让策略只针对体积大于预设体积的目标车辆,而非所有车辆。
技术研发人员:张芳
受保护的技术使用者:威马智慧出行科技(上海)股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!