车辆、车辆控制方法、电子设备及存储介质与流程
本申请涉及道路交通安全领域,并且具体地涉及一种车辆及车辆控制方法。
背景技术:
1、随着汽车保有量的日益增加,交通安全问题日益突出,这种安全问题在缺乏交通控制设施(例如,交通信号灯)的交叉路口尤其严重。通常来说,在无控交叉路口发生事故的概率远远大于在有控交叉路口发生事故的概率。因此,如何避免或缓解在无控交叉路口发生交通事故正日益受到重视。正在研究用于防止这类问题发生的安全辅助驾驶功能。
2、对于当前的车辆安全辅助驾驶来说,通常随机选择一个固定阈值作为碰撞预警阈值,而未考虑不同类型的路段、不同类型的车辆以及路况信息等,从而增加了漏警率和错误率,这在增加了风险的同时也降低了用户体验。
技术实现思路
1、本申请提供了一种可至少部分解决上述问题的车辆、车辆控制方法、电子设备及存储介质。
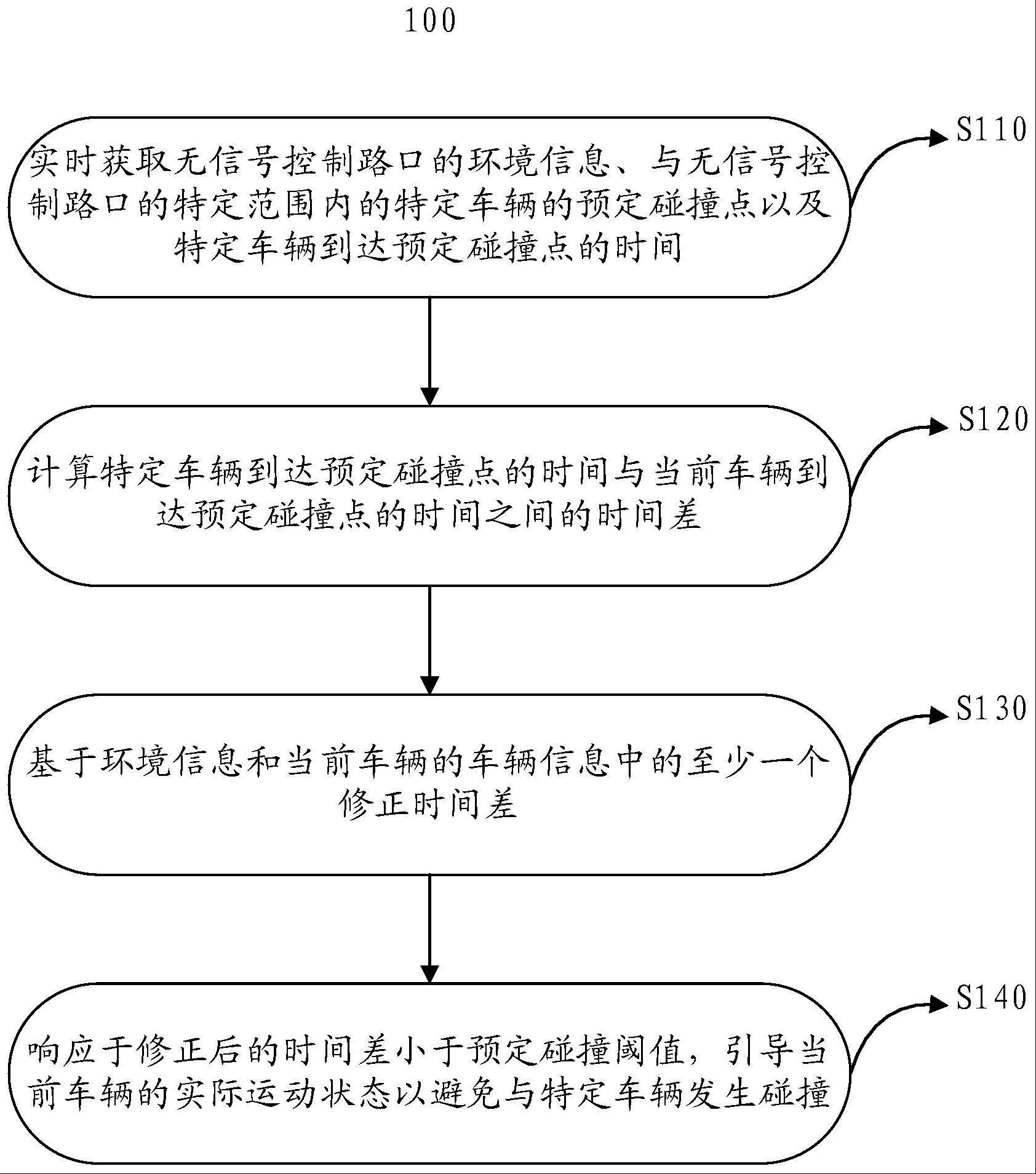
2、根据本申请的一个方面,提供了一种无信号控制路口的车辆控制方法,包括:实时获取无信号控制路口的环境信息、与无信号控制路口的特定范围内的特定车辆的预定碰撞点以及特定车辆到达预定碰撞点的时间;计算特定车辆到达预定碰撞点的时间与当前车辆到达预定碰撞点的时间之间的时间差;基于环境信息和当前车辆的车辆信息中的至少一个修正时间差;以及响应于修正后的时间差小于预定碰撞阈值,引导当前车辆的实际运动状态以避免与特定车辆发生碰撞。
3、在实施方式中,基于环境信息和当前车辆的车辆信息中的至少一个修正时间差可以包括:基于环境信息和当前车辆的车辆信息中的至少一个确定当前车辆的修正系数;以及将修正系数增加到时间差,以修正时间差。
4、在实施方式中,环境信息可以包括天气情况、道路状况、路口地形、路口能见度和路口车流量中的至少一种。
5、在实施方式中,当前车辆的车辆信息可以包括当前车辆的类型、当前车辆的油量和当前车辆的驾驶员性格中的至少一种。
6、在实施方式中,预定碰撞阈值可以为8秒。
7、在实施方式中,响应于修正后的时间差小于预定碰撞阈值,引导当前车辆的实际运动状态可以包括:实时获取特定车辆与当前车辆之间的距离;基于距离确定预警级别,以使得当前车辆基于预警级别,实施不同的减速制动策略。
8、在实施方式中,预警级别可以与特定车辆和当前车辆之间的距离成反比,预警级别越高,使得当前车辆实施的减速制动越紧急。
9、在实施方式中,响应于特定车辆与当前车辆之间的距离小于50米且大于30米,可以将预警级别确定为一级预警,对应的减速策略为缓慢制动;响应于特定车辆与当前车辆之间的距离小于30米且大于10米,可以将预警级别确定为二级预警,对应的减速策略为快速制动;以及响应于特定车辆与当前车辆之间的距离小于10米,可以将预警级别确定为三级预警,对应的减速策略为紧急制动。
10、根据本申请的一个方面,提供了一种车辆,包括:处理器;以及存储器,通信地连接到处理器,并且存储有可被处理器执行的指令,在指令由处理器执行时使得处理器执行以下方法。该方法包括:实时获取无信号控制路口的环境信息、与无信号控制路口的特定范围内的特定车辆的预定碰撞点以及特定车辆到达预定碰撞点的时间;计算特定车辆到达预定碰撞点的时间与当前车辆到达预定碰撞点的时间之间的时间差;基于环境信息和当前车辆的车辆信息中的至少一个修正时间差;以及响应于修正后的时间差小于预定碰撞阈值,引导当前车辆的实际运动状态以避免与具有最高优先级的车辆发生碰撞。
11、根据本申请的一个方面,提供了一种电子设备,包括:处理器;以及,存储器,通信地连接到处理器,并且存储有可被处理器执行的指令,在指令由处理器执行时使得处理器执行如上述实施方式提及的车辆控制方法。
12、本申请另一方面提供了一种计算机可读存储介质,存储有计算机程序,其中,计算机程序被处理器执行时,实现如上述实施方式提及的车辆方法。
13、根据本申请一个实施方式提供的车辆控制方法,可以通过考虑不同的环境信息和不同的车辆信息动态地得到车辆的修正系数,车辆可以基于修正系数修正两个车辆到达碰撞点的时间差,并基于修正后的时间差来确定是否存在碰撞的可能性。以此方式,可以改善预测事故发生的准确性,提高了行车安全并改善了驾驶体验。
14、根据本申请一个实施方式提供的车辆控制方法,可以通过根据不同的车辆距离发出不同的预警级别,并基于不同的预警级别采取不同的制动策略。以此方式,可以改善驾驶体验并提高行车舒适度。
技术特征:
1.一种无信号控制路口的车辆控制方法,包括:
2.根据权利要求1所述的车辆控制方法,其中,基于所述环境信息和所述当前车辆的车辆信息中的至少一个修正所述时间差包括:
3.根据权利要求1或2所述的车辆控制方法,其中,
4.根据权利要求1或2所述的车辆控制方法,其中,
5.根据权利要求1所述的车辆控制方法,其中,所述预定碰撞阈值为8秒。
6.根据权利要求1所述的车辆控制方法,其中,响应于修正后的所述时间差小于预定碰撞阈值,引导所述当前车辆的实际运动状态包括:
7.根据权利要求6所述的车辆控制方法,其中,所述预警级别与所述特定车辆和所述当前车辆之间的距离成反比,所述预警级别越高,使得所述当前车辆实施的减速制动越紧急。
8.根据权利要求7所述的车辆控制方法,其中,
9.一种车辆,包括:
10.根据权利要求9所述的车辆,其中,基于所述环境信息和所述当前车辆的车辆信息中的至少一个修正所述时间差包括:
11.根据权利要求9或10所述的车辆,其中,
12.根据权利要求9或10所述的车辆,其中,
13.根据权利要求9所述的车辆,其中,所述预定碰撞阈值为8秒。
14.根据权利要求9所述的车辆,其中,响应于修正后的所述时间差小于预定碰撞阈值,引导所述当前车辆的实际运动状态包括:
15.根据权利要求14所述的车辆,其中,
16.根据权利要求15所述的车辆,其中,
17.一种电子设备,其中,包括:
18.一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令在由处理器执行时执行权利要求1-8中任一项所述的车辆控制方法。
技术总结
本申请涉及车辆控制方法、车辆、电子设备及存储介质。车辆控制方法包括:实时获取无信号控制路口的环境信息、与所述无信号控制路口的特定范围内的特定车辆的预定碰撞点以及所述特定车辆到达所述预定碰撞点的时间;计算所述特定车辆到达所述预定碰撞点的时间与当前车辆到达所述预定碰撞点的时间之间的时间差;基于所述环境信息和所述当前车辆的车辆信息中的至少一个修正所述时间差;以及响应于修正后的所述时间差小于预定碰撞阈值,引导所述当前车辆的实际运动状态以避免与所述特定车辆发生碰撞。
技术研发人员:马克
受保护的技术使用者:博泰车联网科技(上海)股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!