道面检测机器人的制动方法、装置、电子设备和存储介质与流程
本发明涉及制动,具体涉及一种道面检测机器人的制动方法、装置、电子设备和存储介质。
背景技术:
1、道面检测机器人是自主驱动的机器人运动平台,根据规划的区域和指定路线进行道面检测。道面检测机器人是一个四轮驱动的平台,每个车轮都有独立的驱动装置和转向装置,可以根据车辆行驶速度、航向调整每个车轮的驱动力和转向角。在进行道面检测时,为了完成一条检测路径后,可以快速切换到旁边的未检测路面,机器人的各车轮上都设置有转向电机。为了保证机器人能够安全运行,当出现机器人故障、检测路面存在障碍物等紧急状况时,需要机器人能够快速响应突发情况,进行制动。但是,由于每个车轮都有独立的转向电机,在进行紧急制动时,机器人可能会出现大转弯的情况,制动不平稳,容易造成机器人损坏。
技术实现思路
1、基于上述研究,本发明实施例提供一种道面检测机器人的制动方法、装置、电子设备和存储介质,以改善上述问题。
2、本发明的实施例可以通过以下实现:
3、第一方面,本发明实施例提供一种道面检测机器人的制动方法,应用于道面检测机器人,所述机器人包括两个前车轮和两个后车轮,各所述车轮设置有驱动电机和转向电机,两个所述后车轮设置有机械制动装置,所述方法包括:
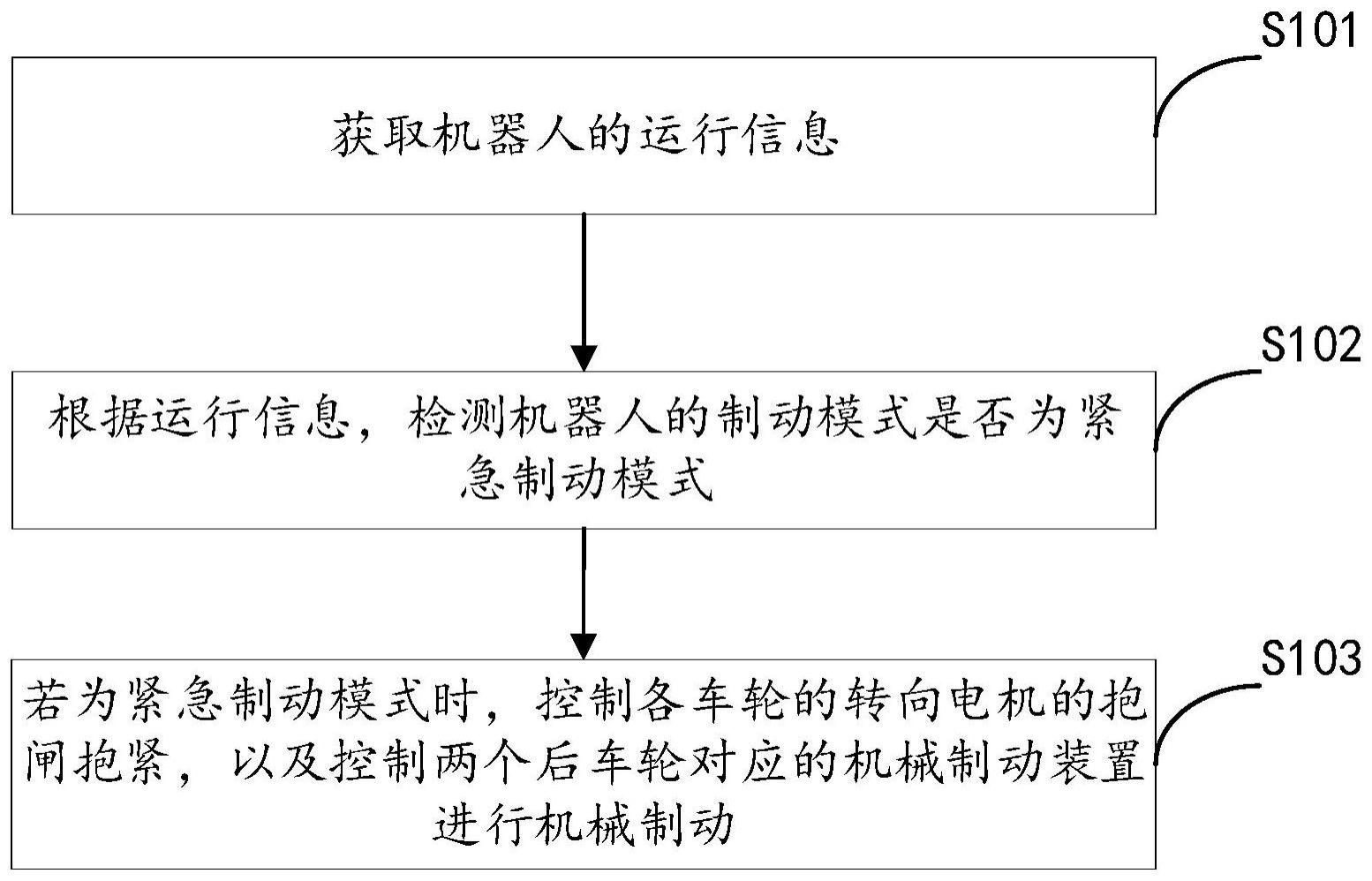
4、获取所述机器人的运行信息;
5、根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式;
6、若为紧急制动模式时,控制各所述车轮的转向电机的抱闸抱紧,以及控制两个所述后车轮对应的机械制动装置进行机械制动。
7、在可选的实施方式中,两个所述前车轮设置有机械制动装置,所述方法包括:
8、若为紧急制动模式时,控制两个所述前车轮对应的机械装置进行机械制动。在可选的实施方式中,所述机械制动装置为液压制动装置,所述液压制动装置包括开关模块,以及分别设置在两所述后车轮上的制动器,所述控制所述机械制动装置进行制动的步骤包括:
9、开启所述液压制动装置的开关模块;
10、所述开关模块控制分别控制两个所述后车轮对应的制动器压紧车轮,进行制动。
11、在可选的实施方式中,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
12、若为紧急制动模式时,判断各所述车轮的驱动电机是否正常工作;
13、若正常工作时,控制各所述车轮的转向电机的抱闸抱紧,控制所述机械制动装置进行机械制动,以及控制各所述车轮对应的驱动电机进行能量回馈制动。
14、在可选的实施方式中,所述运行信息包括所述机器人各部件的工作信息,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
15、根据各所述部件的工作信息,判断各所述部件的工作状态是否为故障状态;
16、若任一所述部件的工作状态为故障状态时,所述机器人的制动模式为紧急制动模式。
17、在可选的实施方式中,所述运行信息包括所述机器人运行路面的路面参数、所述机器人的通信信息以及所述机器人的急停信息,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
18、根据所述路面参数,检测在所述机器人的安全制动距离内是否存在障碍物,若存在障碍物,所述机器人的制动模式为紧急制动模式;
19、根据所述通信信息,检测所述机器人的通信信号是否中断,若通信信号中断,所述机器人的制动模式为紧急制动模式;
20、根据所述急停信息,检测所述机器人的急停开关是否按下,若急停开关按下,所述机器人的制动模式为紧急制动模式。
21、在可选的实施方式中,所述运行信息包括各所述车轮的当前运行速度、驱动电机能量回馈制动的减速度,以及所述机器人的当前位置和起始位置,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
22、若所述机器人的制动模式为非紧急制动模式时,控制各所述车轮对应的驱动电机进行能量回馈制动;
23、所述控制各所述车轮对应的驱动电机进行能量回馈制动的步骤包括:
24、根据所述当前运行速度和所述减速度,得到安全制动距离;
25、根据所述当前位置信息和所述起始位置信息,得到所述机器人的当前完成路径,计算当前完成路径与预设路径的差值;
26、检测所述差值是否大于所述安全制动距离;
27、若所述差值大于所述安全制动距离,则继续按照预设路径进行道面检测;若所述差值未大于所述安全制动距离时,控制各所述车轮的驱动电机进行能量回馈制动。
28、第二方面,本发明实施例提供一种道面检测机器人的制动装置,应用于道面检测机器人,所述机器人包括两个前车轮和两个后车轮,各所述车轮设置有驱动电机和转向电机,两个所述后车轮设置有机械制动装置,所述道面检测机器人的制动装置包括:
29、数据获取模块,用于获取所述机器人的运行信息;
30、检测模块,用于根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式;
31、控制模块,用于在紧急制动模式时,控制各所述车轮的转向电机的抱闸抱紧,以及控制两个所述后车轮对应的机械制动装置进行机械制动。
32、第三方面,本发明实施例提供一种电子设备,所述电子设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现前述任一实施例所述的道面检测机器人的制动方法。
33、第四方面,本发明实施例提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现前述任一实施例所述的道面检测机器人的制动方法。
34、本发明提供的道面检测机器人的制动方法、装置、电子设备和存储介质,在获取机器人的运行信息后,根据运行信息检测机器人的制动模式是否为紧急制动模式,若为紧急制动模式时,控制各车轮的转向电机的抱闸抱紧,以及控制两个后车轮对应的机械制动装置进行机械制动。如此,在紧急制动时,通过控制各车轮的转向电机的抱闸抱紧,控制两个后车轮对应的机械制动装置进行机械制动,使得道面检测机器人能够快速、平稳的进行紧急制动。
技术特征:
1.一种道面检测机器人的制动方法,其特征在于,应用于道面检测机器人,所述机器人包括两个前车轮和两个后车轮,各所述车轮设置有驱动电机和转向电机,两个所述后车轮设置有机械制动装置,所述方法包括:
2.根据权利要求1所述的道面检测机器人的制动方法,其特征在于,两个所述前车轮设置有机械制动装置,所述方法包括:
3.根据权利要求1所述的道面检测机器人的制动方法,其特征在于,所述机械制动装置为液压制动装置,所述液压制动装置包括开关模块,以及分别设置在两所述后车轮上的制动器,所述控制所述机械制动装置进行制动的步骤包括:
4.根据权利要求1所述的道面检测机器人的制动方法,其特征在于,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
5.根据权利要求1所述的道面检测机器人的制动方法,其特征在于,所述运行信息包括所述机器人各部件的工作信息,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
6.根据权利要求1所述的道面检测机器人的制动方法,其特征在于,所述运行信息包括所述机器人运行路面的路面参数、所述机器人的通信信息以及所述机器人的急停信息,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
7.根据权利要求1所述的道面检测机器人的制动方法,其特征在于,所述运行信息包括各所述车轮的当前运行速度、驱动电机能量回馈制动的减速度,以及所述机器人的当前位置和起始位置,所述根据所述运行信息,检测所述机器人的制动模式是否为紧急制动模式的步骤包括:
8.一种道面检测机器人的制动装置,其特征在于,应用于道面检测机器人,所述机器人包括两个前车轮和两个后车轮,各所述车轮设置有驱动电机和转向电机,两个所述后车轮设置有机械制动装置,所述道面检测机器人的制动装置包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的道面检测机器人的制动方法。
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至7任一项所述的道面检测机器人的制动方法。
技术总结
本发明实施例公开了一种道面检测机器人的制动方法、装置、电子设备和存储介质,涉及制动技术领域。本发明实施例在获取机器人的运行信息后,根据运行信息检测机器人的制动模式是否为紧急制动模式,若为紧急制动模式时,控制各车轮的转向电机的抱闸抱紧,以及控制两个后车轮对应的机械制动装置进行机械制动。如此,在紧急制动时,通过控制各车轮的转向电机的抱闸抱紧,控制两个后车轮对应的机械制动装置进行机械制动,使得道面检测机器人能够快速、平稳的进行紧急制动。
技术研发人员:肖继春,王云飞,王宇琛,杨周强,桂仲成
受保护的技术使用者:成都圭目机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!